Робастное управление при формировании вращающейся тросовой группировки микроспутников конфигурации «ступица-спицы» с использованием неравенства Гамильтона-Якоби

Автор: Ш. Чэнь, Ю. М. Заболотнов
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 4, 2022 года.
Бесплатный доступ
Рассматривается задача управления при формировании на низкой околоземной орбите вращающейся тросовой группировки конфигурации «ступица-спицы» (hub-spoke), в которой микроспутники расположены радиально относительно центрального космического аппарата (ступица) и соединены с ним тросами (спицами) соответственно. Для анализа динамики тросовой системы разработана математическая модель (используются уравнения Лагранжа) в орбитальной системе координат, при этом центральный космический аппарат рассматривается как твердое тело конечных размеров. Предложена схема управления, в которой управляющий момент, приложенный к центральному телу, обеспечивает заданное вращательное движение системы, а закон развертывания тросов строится в соответствии с принципами робастного управления, которое осуществляется за счет регулирования натяжения троса и малой тяги, приложенной к микроспутникам. При анализе устойчивости движения системы используются теория Ляпунова и неравенство Гамильтона-Якоби, с помощью которого определяется показатель робастности системы управления. Приводятся результаты численных расчетов, которые подтверждают, что предлагаемая схема управления оказывается эффективной при учете периодических гравитационных возмущений, внешних возмущений и возмущений, связанных с неопределенностью в начальных состояниях системы и с вращением центрального тела.
Космическая тросовая группировка, микроспутник, конфигурация «ступица-спицы», вращение группировки микроспутников, развертывание тросов, робастное управление, неравенство Гамильтона-Якоби
Короткий адрес: https://sciup.org/14124850
IDR: 14124850 | УДК: 629.78 | DOI: 10.26732/j.st.2022.4.02
Robust control of a hub-spoke tethered formation system of microsatellites using Hamilton-Jacobi inequality
The problem of controlling a rotating hub-spoke tethered formation system in low Earth orbit is considered, in which microsatellites are located radially around the central spacecraft (hub) and connected to it by tethers (spokes). To analyze the dynamics of the tethered system, a mathematical model is developed in the orbital coordinate system by Lagrange method, in which the central spacecraft is regarded as a rigid body. In the proposed control scheme, the spin motion of the central body is regulated by the control moment, and tether deployment control law is proposed by robust approach, which is carried out by regulating the tether tensions and low thrusts acting on the microsatellites. The robustness and stability of the system are investigated using Lyapunov theory and Hamilton-Jacobi inequality, which is used to determine the robustness index of the control system. The results of numerical calculations are presented, which confirm that the proposed control scheme is effective when taking into account periodic gravitational perturbations, external perturbations and perturbations associated with uncertainty in the initial states of the system and with the rotation of the central body.
Текст статьи Робастное управление при формировании вращающейся тросовой группировки микроспутников конфигурации «ступица-спицы» с использованием неравенства Гамильтона-Якоби
Тросовые группировки космических аппаратов (ТГКА) считаются одной из перспективных технологий, позволяющей обеспечить согласованный полет космических аппаратов (КА). По сравнению с традиционными космическими системами КА, несоединенными между собой механическими связями (тросами), ТГКА позволяют формировать на орбите надежную легкую структуру с большим разнообразием геометрических конфигураций. Конфигурации ТГКА могут поддерживаться на орбите долгое время, и при этом требуется низкий расход топлива благодаря тому, что силы натяжения тросов могут использоваться в качестве управляющих сил, что является ключевой особенностью космических тросовых систем (КТС) [1].
В последние годы большое количество исследований было сосредоточено на анализе динамики и разработке методов управления КТС, состоящей из двух КА и развернутой в положение, близкое к местной вертикали [2–4]. Когда речь идет о ТГКА, обычно имеются ввиду тросовые системы, состоящие из нескольких КА, причем в зависимости от требований космических миссий, входящие в такие системы КА образуют определенные геометрические конфигурации, например, «линия» [5], «кольцо» [6], «ступица-спи-
Том 6
цы» [7] и др. Доказано, что ТГКА может выполнить множество миссий, таких как космическая интерферометрия, многоточечные распределенные измерения на орбите, исследование дальнего космоса и др.
Среди перечисленных выше конфигураций ТГКА, система «ступица-спицы» привлекла особый интерес исследований. В такой системе центральный КА играет роль «ступицы», а спутники, находящиеся на периферии, соединяются с центральном телом тросами («спицами»). Движение ТГКА в виде «ступица-спицы» имеет свою осо- 236 бенность, которая заключается в том, что для обеспечения устойчивости системы она должна вращаться вокруг центра масс с некоторой угловой скоростью [8]. Формирование вращающейся ТГКА конфигурации «ступица-спицы» является сложной задачей. Чаще всего в настоящее время во многих работах центральный КА рассматривается как материальная точка. Однако чтобы учесть сложное взаимодействие центрального КА и тросов в процессе формирования системы, необходимо учитывать размеры центрального КА [9]. При этом важным является учет действующих возмущений. В связи с этим актуальной является задача разработки робастного управления на этапе формирования ТГКА.
Настоящая работа посвящена задаче управления при формировании ТГКА конфигурации «ступица-спицы», вращающейся в орбитальной плоскости. В состав рассматриваемой системы входят центральный КА и несколько микроспутников. Предполагается, что в исходном состоянии микроспутники жестко соединяются с центральным КА и повторяют конфигурацию «ступица-спицы», которая вращается вокруг центра масс системы с некоторой начальной угловой скоростью. Конечная конфигурация ТГКА – это также конфигурация «ступица-спицы», вращающаяся с угловой скоростью, равной начальной. При анализе динамики системы центральный КА рассматривается как твердое тело, а микроспутники – как материальные точки. Тросы – неупругие невесомые нерастяжимые механические связи переменной длины. Угловая скорость вращения КА поддерживается постоянной с помощью управляющего вращательного момента. Для разработки закона выпуска тросов используется скользящий режим управления. Определяется показатель робастности системы при наличии периодических гравитационных возмущений, вызванных вращением КА, и других внешних возмущений. Устойчивость движения системы анализируется с помощью теории Ляпунова и неравенства Гамильтона-Якоби. Приводятся результаты численного моделирования, иллюстрирующие эффективность предлагаемой схемы управления при действии различных типов возмущений.
1. Математическая модель движения ТГКА конфигурации «ступица-спицы»
В схему рассматриваемой ТГКА, представленной на рис. 1, входят центральный КА массой mc и n микроспутников массой mi , i = 1, 2, …, n . Здесь КА рассматривается как симметричный однородный цилиндр радиусом rc и длиной hc . Тросы – невесомые нерастяжимые механические связи длиной li , i = 1, 2, …, n . Кроме того, при описании движения ТГКА принимаются еще следующие допущения:
-
1) Система движется по неизменной круговой орбите.
-
2) Выпуск тросов происходит в плоскости орбиты.
При построении математической модели используются геоцентрическая система координат OXYZ и орбитальная подвижная система координат Cxyz (рис. 1). Начало O находится в центре масс Земли, плоскость OXY совпадает с плоскостью экватора и ось OX направлена от O в точку весеннего равноденствия, ось OZ направлена по оси вращения Земли. Орбитальная система координат Cxyz связана с центром масс КА, причем предполагается, что в процессе развертывания конфигурация системы близка к симметричной, что обеспечивается системой управления. Поэтому полагается, что центры масс КА и системы совпадают. Тогда ось Cx направлена по радиус-вектору R c центра масс КА, а ось Cy расположена в плоскости орбиты и ориентирована по направлению движения системы. Орты системы координат Cxyz задаются как i c , j c , k c . Система движется по круговой орбите с угловой скоростью Ω = Ω k c .
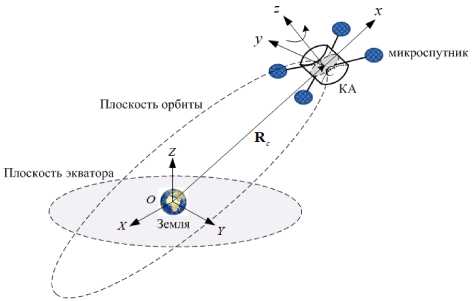
Рис. 1. Схема ТГКА и используемые системы координат
Для вывода уравнений движения ТГКА используются уравнения Лагранжа:
d (аTk) аTk_ ап 1 I—+ Q
dt ^ dq ) dq dq
где Tk и П – кинетическая и потенциальная энергии системы; q , q – векторы обобщенных координат и скоростей; Q – вектор обобщенных сил.
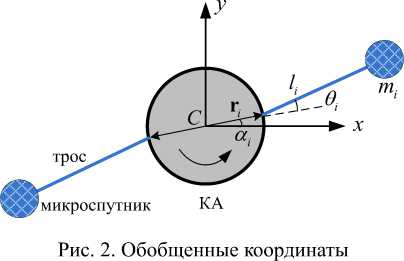
Для описания вращательного движения центрального КА относительно своего центра масс используются углы α i (рис. 2). На рис. 2 векторы r i ( i = 1, 2, …, n ) определяют положения точек крепления тросов, причем при их симметричном расположении имеем | r i | = r c . Развертывание i -го троса характеризуется длиной li и углом θ i , который определяет отклонение i -го троса от направления вектора r i (рис. 2). Таким образом, положение i -го микроспутника в орбитальной системе координат может быть выражено как:
Р г = V i c + Уг * j c + zi • k c , i = U,-, n , (2)
4>i( li + irc cos ei) ei— ymr sinQl + i=1
n
+Zmi[2li(ai - ei +Q)(li+ rc cosei )— i =1
-
- r c l i et( 2a i - e ■ 2 Q ) sine ; ] + d „ = Q a_ ,
) +
(I
-
e, - 1 + rc -cosO, a -2^ a,. - 9,. +q z 7 г г 1 \ I I
V li J
+ rc sin Oja,2 + 2Qa ) + d„ = li 1( ‘ i) ei mil2
где:
xf = rc cos az. +1 cos ( a - 0z), y. = r sin a. +l sin(a, - 0.), z. = 0.
i c ii i i i
Поскольку тросы считаются невесомыми, то
кинетическая энергия системы, входящая в уравнение (1), определяется следующим образом:
T = 1
J c ( Q + a i ) 2 + m v 2 +
V r c sin 6(a i - l i ( a i - 9 1 + ^ ) 2 -^ 2 -
Q (7)
-rc cos 9i (ai2 + 2Qai) + dl = —1l , i mi где Q α , Q θ , Q l – обобщенные силы, d α , d θ , d l – периодические члены гравитационных возмущений,
n
+ E m i ( v c + v i M v c + v i )
i = 1
i = 1,2,..., n,
где Jc – момент инерции центрального КА, v c = fi x R c — вектор орбитальной скорости центра масс системы, v i = p i + Q x p i - вектор скорости i -го микроспутника относительно КА.
вызванные вращением системы и имеющие следующий вид:
d a = d 0 IL m i [ 0,5 r c2 sin 2a i + i = 1 (8)
+ 0,5 l i 2 sin ( 2a i - 29 i ) + r c^ sin ( 2a i - 9 i ) ] ,
d B i =- d о [ cos ( a i - e , .) sin ( a - 9 i ) + + r c cos a i sin ( a i - 9 i )/ l i ] , d^ = - d 0 [ l i cos 2 ( a i - 9 i ) + + r c cos a i cos ( a i - 9 i ) ] , где d 0 = 3Q2.
2. Программа управления при формировании конфигурации «ступица-спицы»
Поскольку тросы считаются нерастяжимыми, то общая потенциальная энергия, обусловленная гравитацией, определяется как:
П = - ц
mcn mi
I R e l M |R c + P i|
, i = 1,2,..., n , (4)
где μ – гравитационная постоянная.
Подставляя (3) и (4) в уравнения Лагранжа и рассматривая α i , θ i , li как обобщенные координаты, получим уравнения движения ТГКА в подвижной системе координат, которые записываются в следующем виде:
n
Jc + ^ mi ( r c 2 + l i + 2 l i rc cos9 i ) a i i = 1 _
—
Основная цель при формировании рассматриваемой ТГКА состоит в том, чтобы разработать схему управления для перевода системы в конечное заданное состояние при сохранении желаемой конфигурации. Для этого, во-первых, необходимо стабилизировать вращательное движение центрального КА; во-вторых, в процессе развертывания тросов необходимо исключить их касание друг с другом и с корпусом центрального КА. Поэтому в конечный момент движение системы должно удовлетворить следующим условиям: a i ( tf ) = 0, a i ( t f. j = a i ( 1 0 ) = ша = const, 0 i ( t f ) = 0, 10 i ( t f )| = 9 d = const < п/2, ^ t , ) = ^ C t, ) = 0, l i ( t , ) = L .
Том 6
Здесь ωα – заданная скорость вращения системы; θ d , ld – конечные значения угла наклона и длины тросов соответственно.
При выпуске тросов необходимо чтобы угловая скорость вращения КА была постоянной и равной ее начальной угловой скорости. Это можно обеспечить с помощью управляющего момента τc, действующего на центральный КА. Таким образом, обобщенная сила Q = τ . А при определении обобщенных сил Q θ и Q l учитываются реактивные силы малой тяги Fi (ортогональны тросам), приложенные к микроспутникам, и силы натяжения T. Тогда Q^ = -Fl, Q^ = -T.
Исходя из поставленной цели управления, предлагается схема системы управления движением ТГКА конфигурации «ступица-спицы» (рис. 3). Приведенная схема основана на предположении, что во время выпуска тросов вращение КА известно (угловая скорость постоянна), что обеспечивается действием момента τ c . При этом основное внимание сосредоточено на разработке робастного управления процессом выпуска тросов.
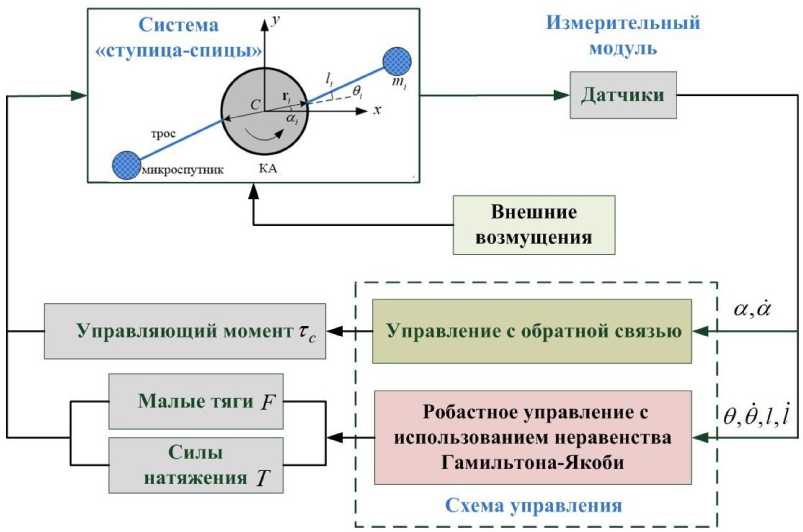
Рис. 3. Структура схемы управления
Управляющий момент τ c задается с использованием принципа обратной связи [10]:
Tc = rckm ( a - ®a ) + ka ( a - ®a ‘ t ), (11)
где k ω и k α – коэффициенты обратной связи по скорости и углу вращения КА, coa = a i ( Zo ) - начальная скорость вращения КА. Здесь стоит отметить, что уравнение (5) для α i имеет одинаковый вид, поэтому в (11) для краткости был опущен низкий индекс i .
При допущении, что:
α ≈ω =const, α ≈0, уравнения (6) и (7), описывающие развертывание тросов, принимают вид:
Далее при разработке закона управления развертыванием тросов используются упрощенные уравнения (12) и (13), а для проверки эффективности предлагаемой схемы управления применяется полная модель, т. е. система уравнений (5)–(7). В уравнениях (12) и (13) индекс i также может быть опущен, так как эти уравнения одинаковы для всех тросов. Введем вектор состояний системы:
x = [ xx x2 ]T =[9 l ]T.
Уравнения (12) и (13) переписываются в виде:
x + V ( x , x ) x + G ( x ) + d ( x ) = M ( x ) U , (14)
0i— 21.( ®a
—
где:
+ r c sin 0 i ( ® 2 + 2Q® a ) ,l i + d 0 ,
(12) = — Fjmili .
V ( x , x )=
-1 (6 - 2roa - 2Q)
-2 ( ... +П)/l
,
li - l (
®a - 9 i +q)2 -q 2
-
-rc cos 9i (®2 + 2Q®a) + d,t = -T /mi .
G ( x ) =
r c sin 9 ( ® a + 2Q “ a ) I1
-(l + rc cos 9)(Ю2 + 2Q®„)_,
d ( x ) = [ d^ + A0 d l + A z ]T - вектор суммы периодических гравитационных возмущений и внешних возмущений, M ( x ) = diag ( - 1/ ml , -1/m ) ,
U = [ F T ] - вектор управляющих сил.
Пусть вектор конечных состояний системы x d = [ X d x 2 d ]T = [ 9 d lT Г и вектор отклонений от него e = x - x d = [ ex e 2 ] . Предлагается следующий закон управления:
U = M ( x ) - 1 [ A u + x d + V ( x , x ) x d + G ( x ) ] , (15) где ∆ u – управление, которое определяется ниже. С учетом того, что x d = x d = 0, форма управления U упрощается:
U = M ( x ) - 1 [ A u + G ( x ) ] .
Подставляя закон (15) в (14), получим:
e + V ( x , x ) e + d ( x ) = A u . (16)
Далее для (16) используется более короткое обозначение e + Ve + d = A u . Поверхность скольжения задается следующим образом:
s = e + ce , (17)
где c = diag ( c 1, c 2) – матрица коэффициентов, и здесь c 1, c 2 – положительные действительные числа.
Поверхность скольжения (17) может быть переписана как e = s - ce . Дифференцируя (17), получим:
s = e+ce .
Подставляя (16) и (17) в (18), найдем:
s = e+ce = - v e - d +A u+ce =
= - V ( s - ce ) - d + A u + ce =
= - Vs + ( Vce + ce ) - d + A u =
= - Vs + W - d + A u ,
где W = Vce + ce .
Далее пусть y = [ e s ] , тогда система уравнений (17) и (19) переписывается в виде:
< y = f ( y ) + g ( y ) d _ z = h ( y )
где:
оценки, например, функция ошибки. Для робастности системы определяется следующий показатель, характеризующий устойчивость и нечувствительность системы к возмущениям:
J = sup
II d| L 2 * 0
II z| L IId| L ,
где 11 z 11 L = t d J z T z dt , 11 d 11 L = J d T d dt - нормы век-2 У 0 2 У 0
торов z , d на пространстве L 2 (Гильбертово пространство), «sup» обозначает точную верхнюю границу. Здесь показатель J также называется L 2-усиление ( L 2-gain) [11]. Очевидно, что при низком показателе J система (20) обладает свойством высокой надежности, и это может быть достигнуто путем разработки подходящего управления ∆ u . Для этого используется теорема о неравенстве Гамильтона-Якоби (HJI – Hamilton-Jacobi Inequality), которая изложена ниже.
Теорема . Пусть γ > 0 – некоторая положительная константа, тогда для системы (20) если существует положительно определенная дифференцируемая функция L ( y ), которая удовлетворяет неравенству:
L ( y ) = ^ y ~ [ f ( y ) + g ( y ) d ]^ yy (22)
^ 2 {Y21d Г-Iz 2}, Vd, то индексный показатель робастности системы (20) J ≤ γ [11].
Для того чтобы показатель робастности разработанного контроллера удовлетворял J ≤ γ, управление ∆ u для системы (20) зададим:
A u = Vs - W s - d 0-s . (23)
2 y 2 2
Анализ устойчивости системы и доказательство робастности с управлением (23) заключаются в следующем. В качестве функции Ляпунова принимается следующая положительно определенная функция:
- Vs + W + A u

z = d 0 s .
1L = sTs, 2
производная которой имеет вид:
Чтобы найти робастное управление, сначала необходимо определить, как оценить робастность системы. Для этого можно использовать следующее определение [11].
Определение . Дана нелинейная система с несколькими входами и выходами, например (20), где y e9t n x 1 , f( y ), g ( y ) - непрерывные функции, d – вектор возмущений, z – введенная функция
L = s T s = s T ( - Vs + W - d + A u ) =
= s T
V
d 1 . d 12.1
- d - 27 s - т s ) .
Пусть
H = L - 2 Y 21 |d| f + 2 | z | Г,
Подставляя (25) в (26), получим:
H = — s T d — 1r s T s 2γ 2
—
d 2
0 s T s
—
V
— s T d — 1y s T s
2γ 2
—
—
1 γ 2 d
- s + Y d
γ
—s + Y d γ
1Y ‘I Id Г +1H Г =
—fsT s+1И =
— f sT s + 1| d » s| Г =
1 2 2
Из H ≤ 0 следует, что L ≤ γ 2 d
- 12 z 2 . Та-
ким образом, система (20) асимптотически устойчива. Более того, согласно Теореме система (20) обладает робастностью, показатель которой мень-
ше γ.
3. Результаты численного моделирования и их анализ
Проводится численное моделирование движения ТГКА с применением управляющего момента (11) и закона управления (15). В качестве примера при моделировании рассматривается система «ступица-спицы», в которую входят два микроспутника i = 1, 2. Были приняты следующие массово-геометрические параметры системы: масса КА mc = 500 кг, его радиус rc = 1 м, длина hc = 1 м, момент инерции J c = 0,5 m c rc 2 , масса микроспутников m 1 = 10 кг, m 2 = 12 кг. Высота орбиты Hc = 500 км и начальные условия движения системы:
a1 (0) = 0, a2 (0) = n, ai (0) = 50Q,
11(0) = 0,5м, 12(0) = 1м, li(0) = 0,5м/с,
9г (0) = 0,1рад, 9г (0) = 0.
Характеристики состояния системы в конечный момент времени:
ai (tf.) = 50Q, li (tf.) = 1d = 100 м, li (tf)=0, e,( tf)=9i( tf)=0.
Коэффициенты программы управления приводятся в таблице.
Таблица
Значения коэффициентов программы управления
|
Описание |
Значение |
|
Коэффициенты обратной связи k ω, k α |
100; 0,01 |
|
Матрица коэффициентов поверхности скольжения c = diag ( c 1, c 2) |
c = diag (0,02, 0,02) |
|
Параметр γ |
1 |
Том 6
На ТГКА, которая движется на низкой околоземной орбите, действуют следующие основные возмущения: гравитационный момент, аэродинамические силы, давление солнечного излучения. Суммарная величина этих возмущений не превышает 1∙10-5 [12]. Для того чтобы продемонстрировать способность подавления указанных возмущений предлагаемой схемой управления при моделировании используется комбинация гармонических составляющих, частоты которых характеризуются как низкими, так и высокими составляющими, причем низкая частота соответствует периоду орбитального движения системы, а высокая частота – периоду вращения системы вокруг центра масс. Таким образом, имеем:
A = 1-10-4 [sin (Qt) + sin (wa t)], где амплитуда возмущений превышает известные оценки.
На рис. 4–6 проводятся зависимости, характеризующие изменения от времени переменных состояний системы «ступица-спицы». Из рис. 4 следует, что процесс вращательного движения центрального КА характеризуется почти постоянной заданной угловой скоростью:
ша = 50Q« 0,0554 рад/с.
На начальном этапе угловая скорость вращения немного уменьшается из-за увеличения момента инерции всей системы в целом. При завершении процесса развертывания системы угловая скорость α стремится к заданному значению ωα, и, как показано на увеличенном фрагменте на рис. 4, значение α изменяется с периодом, близким к периоду члена гравитационных возмущений d α, соответствующему формуле (8):
Td α ≈ πωα.
Помимо колебаний, вызванных вращением КА, наблюдаются также и колебания с более высокой частотой из-за взаимодействия движений КА и тросов.
Из рис. 5 следует, что углы θ1 и θ2 уменьшаются от начального значения до нуля. В этом процессе также имеет место влияние гравитационного возмущения d θ, которое колеблется с тем же периодом, что и d α. Изменение длин l 1 и l 2 и скорости выпуска тросов от времени приводится на рис. 6. Как следует из результатов, длины первого и второго троса приближаются к заданному конечному значению (0,1 км) по завершении развертывания, хотя их начальные длины отличаются.
На рис. 7 показано как изменяется управляющий момент от времени. Из-за того, что массы двух микроспутников не равны, максимальные значения тяги и конечные значения силы натяжения отличаются, что следует из рис. 8.
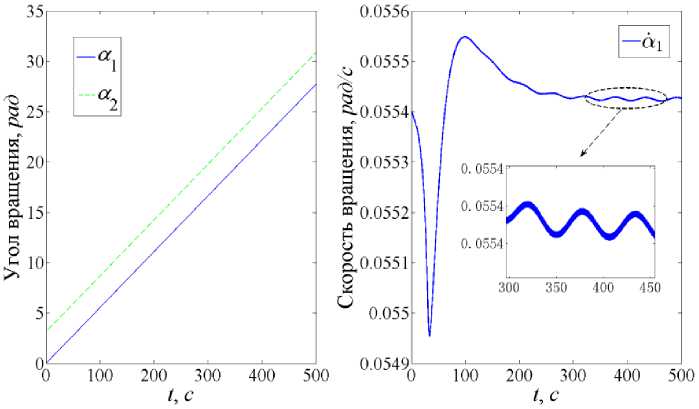
Рис. 4. Изменение угла и угловой скорости вращения системы
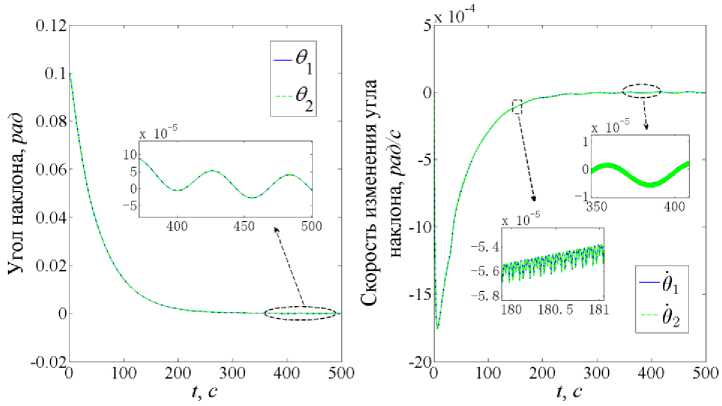
Рис. 5. Изменение угла и угловой скорости вращения троса
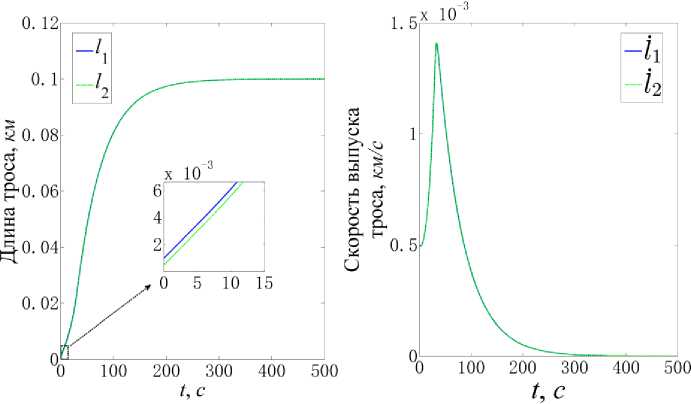
Рис. 6. Изменение длины и скорости выпуска троса

Том 6
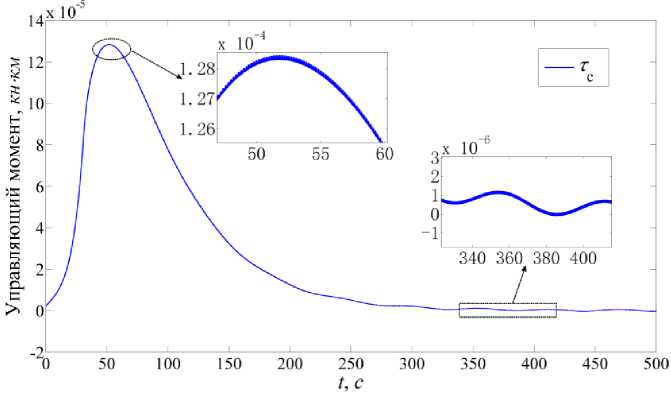
Рис. 7. Изменение управляющего момента τ c
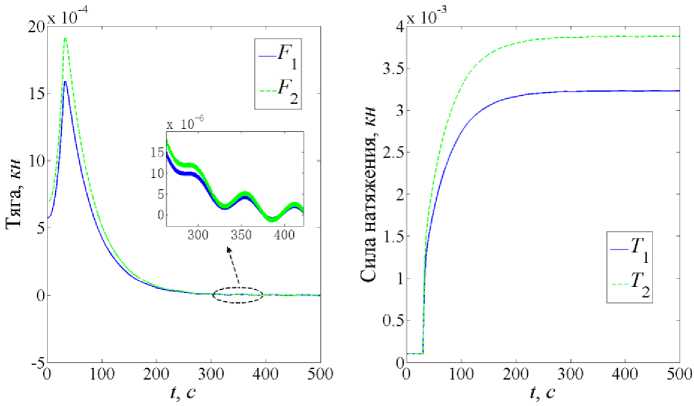
Рис. 8. Изменение управляющих сил
Рис. 9 иллюстрирует изменение показателя робастности системы. В процессе развертывания ТГКА выполняется условие J < γ = 1. На рис. 10 приводятся изменения компонент поверхности скольжения s от времени, откуда следует, что значения всех компонентов приближаются к нулю, подтверждая асимптотическую устойчивость движения при использовании предлагаемого управления.
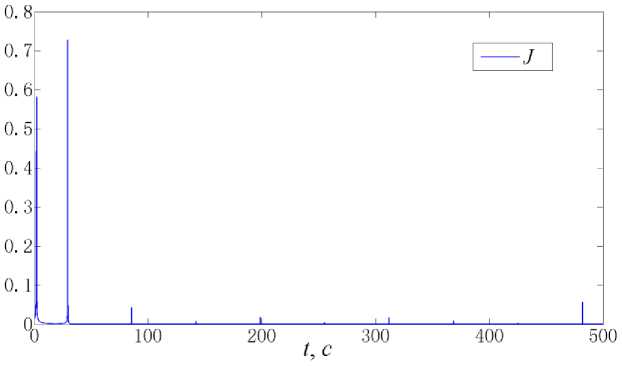
Рис. 9. Изменение показателя робастности J
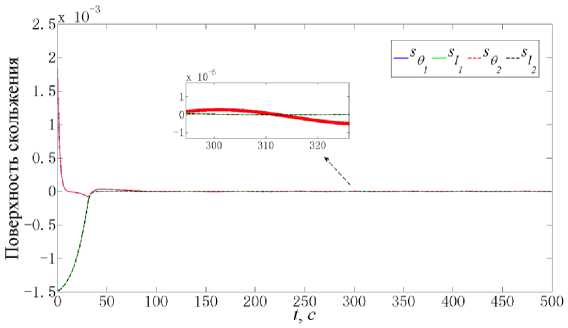
Рис. 10. Изменение компонент поверхности скольжения
Заключение
В данной работе рассматривалось управление движением ТГКА конфигурации «ступица-спицы», вращающейся в орбитальной плоскости. При построении математической модели центральный КА рассматривался как однородный цилиндр, микроспутники – как материальные точки. Предложена комбинированная схема управления при развертывании системы, включающая в себя стабилизацию вращения КА, создание вращательных моментов с помощью двигателей, расположенных на КА, и предложенный закон робастного управления для безопасноговыпускатросов. Причисленноммодели-ровании учитывались влияния внешних возмущений и возмущений, связанных с начальным состоя- нием системы. Результаты моделирования подтвердили эффективность предлагаемой схемы управления и возможность ее использования для формирования ТГКА в виде вращающейся системы «ступица-спицы» при действии возмущений. В качестве развития работы далее планируется проанализировать угловое движение микроспутников и его влияние на процесс формирования системы «ступица-спицы».
Работа выполнена при финансовой поддержке Государственного фонда естественных наук Китая (проект № 62111530051) и РФФИ (проект № 21-51-53002).
Список литературы Робастное управление при формировании вращающейся тросовой группировки микроспутников конфигурации «ступица-спицы» с использованием неравенства Гамильтона-Якоби
- Kumar K. D. Review on dynamics and control of nonelectrodynamic tethered satellite systems // Journal of spacecraft and rockets. 2006. vol. 43. no. 4. pp. 705–720.
- Белецкий В. В., Левин Е. М. Динамика космических тросовых систем. М. : Наука, 1990. 329 с.
- Levin E. M. Dynamic analysis of space tether missions // Am. Astronaut. Soc. Adv. Astronaut. 2007. vol. 126.
- Cartmell M. P., McKenzie D. J. A review of space tether research // Progress in Aerospace Sciences. 2008. vol. 44. no. 1. pp. 1–21.
- Ван Ч., Заболотнов Ю. М. Анализ динамики формирования тросовой группировки из трех наноспутников с учетом их движения вокруг центров масс // Прикладная математика и механика. 2021. Т. 85. № 1. С. 21–43.
- Chen S., Li A., Wang C. Analysis of the deployment of a three-mass tethered satellite formation // IOP Conf. Series: Materials Science and Engineering. 2020. vol. 984. pp. 012–028.
- Заболотнов Ю. М., Назарова А. А. Метод формирования треугольной вращающейся тросовой группировки космических аппаратов с использованием электромагнитных сил // Известия РАН. Теория и системы управления. 2022. № 4. С. 160–176.
- Pizzaro-Chong A., Misra A. K. Dynamics of multi-tethered satellite formations containing a parent body // Acta Astronautica. 2008. vol. 63. pp. 1188–1202.
- Zhai G., Su F., Zhang J., Liang B. Deployment strategies for planar multi-tethered satellite formation // Aerospace Science and Technology. 2017. vol. 71. pp. 475–484.
- Chen S., Liu C., Zabolotnov Yu. M., Li A. Stable deployment control of a multi-tethered formation system considering the spinning motion of parent satellite // The Proceedings of the 2021 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2021). vol. 2. pp. 771–782.
- Khalil H. K. Nonlinear control. New York : Pearson, 2015. 394 p.
- Ma Z., Sun G., Li Z. Dynamic adaptive saturated sliding mode control for deployment of tethered satellite system // Aerospace Science and Technology. 2017. vol. 66. pp. 355–365.
