Робастные методы обработки космических радиолокационных сигналов и изображений

Автор: Неволин Владимир Иванович, Иванеев Дмитрий Владимирович
Статья в выпуске: 3 т.13, 2013 года.
Бесплатный доступ
Рассматриваются робастные методы обработки космических радиолокационных сигналов и изображений, позволяющие повысить помехоустойчивость радиотехнических систем на фоне мощных аддитивных помех. Приводится численное математическое моделирование нелинейного робастного обнаружителя, синтезированного с помощью построения отдельных парциальных каналов, а также представлены его рабочие характеристики. Анализируются полученные результаты, основывающиеся на явлении стохастической накачки и характеризующиеся более высокой информативностью по сравнению с известными оптимальными байесовскими линейными методами. Отмечается более высокая помехоустойчивость по сравнению с согласованной фильтрацией.
Помехоустойчивость, обнаружитель, робастная обработка
Короткий адрес: https://sciup.org/147154923
IDR: 147154923 | УДК: 62-51
Robust processing methods of space radar signals and images
The robust processing methods of the space radar signals and images that improve the noise-immunity of radio systems on the powerful noise background is described. The numerical mathematical simulating of nonlinear robust detector synthesized by the design of separate partial channels as well as its performances are represented. The obtained results based on the phenomenon of the stochastic pumping and described higher informativity in comparison with the known Bayesian optimal linear approaches are represented. The more improved noise immunity in comparison with the matched filter is registered.
Текст научной статьи Робастные методы обработки космических радиолокационных сигналов и изображений
В современных телекоммуникационных системах широко используемые методы обработки информации являются недостаточно эффективными. Поэтому предлагается использовать робастный подход [1], который для многих задач идентификации был развит в [2], для обработки информации, который основывается на критериях робастного варианта леммы Неймана – Пирсона, в данном случае – для обработки радиолокационных сигналов и изображений.
Радиолокационные системы землеобзора космического базирования являются эффективным средством получения оперативной и долговременной информации о состоянии и динамике объектов и районов земного шара в глобальных и региональных масштабах независимо от метеорологических условий и времени суток. Спутниковая радиолокация является одним из важных и наиболее успешно динамично развивающихся направлений дистанционного зондирования Земли из космоса [3].
Основу спутниковой радиолокации составляют разработки методов и аппаратуры, обеспечивающих формирование радиолокационных изображений земной поверхности с высоким пространственным разрешением, которые служат информационным обеспечением при решении широкого круга задач научного, народно-хозяйственного и оборонного характера. Получение таких радиолокационных изображений стало возможным вследствие разработки и практического освоения специфического метода радиолокации - метода синтезирования апертуры антенны.
Немаловажными являются задачи радиолокационного наблюдения земной и морской поверхности, наземных и надводных объектов, характеризуемые общим термином «землеобзор», который включает в себя дистанционное зондирование Земли (ДЗЗ), мониторинг хозяйственной деятельности и природных воздействий, радиовидение.
В [3] изложены теоретические основы и имеющийся научно-технический задел для проектирования космических систем радиолокационного землеобзора, совершенствования методов получения и обработки радиолокационной информации с учетом опыта разработок коллектива ОАО Концерн «Вега», а также современные подходы к тематической обработке радиолокационной информации, формированию банка радиолокационных данных, автоматизации процесса интерпретации радиолокационной информации. Приведены алгоритмы моделирования процессов преобразования сигналов в тракте радиолокаторов с синтезированной апертурой антенны (РСА), методы оценки качества изображения, вопросы калибровки выходного информационного продукта и коррекции аппаратурных искажений.
Рассмотрены основные аппаратурные решения при создании современных РСА, дан ретроспективный обзор развития космических средств радиолокационного землеобзора и обнаружения объектов.
Особ ое в н и ма н и е у д еле но а лгоритмам моделирования преобразования с и г н а лов в с к в озн ом трак те Р СА с и с п ользов ан ием э кспериментальных комплексных изображени й . Он и могут б ыть э ф фек т и в н о п ри ме н е ны при п ро ектировании РСА, наземной отработке аппара ту ры, п ри а на ли з е н еш та тн ых с и ту а ц и й в п роц е с се эксплуатации РСА, а также интерпретации д а н н ых ра д иол ок ационного зондирования.
В ысок ая п ом ехоустойчи в ос ть робастного нелинейного обнаружителя поз в оли т об ра ба тыв а ть си гналы в с ло жн ой п оме х ов ой об с та н ов ке и те м самым д а с т в озмо ж ность получать более точные кос мическ и е и зоб р а ж е н ия. В с ле дствие апробированной цифровой реализац и и с тру к ту ры а лго р итмов об работк и с и гн алов , к о сновным достоинствам предлагаемого метода так ж е мо жн о отн е сти возможн ос ть п р а к ти ч е с к о го п ри ме н е н и я.
Математическое моделирование робастной системы обработки сигналов
М а те ма ти чес ка я моде ль, оп исывающая нелинейную динамическую систе м у к а к р об ас тн ый алгори тм об р а б от к и с иг н а лов , будет представлять собой стохастическое д и ф фе р е н ц иальн о е у ра в н е н и е в торого п орядк а , которое будет выглядеть следующим образом:
2 1 = 1
I + LC ( u ) = LC ( u ) ^ (?) .
d^u X du 1 QC( u V du
--1----1---—1 I dt1 RC^ dt C(m) Qu (dt
Здесь R, C(u) - сопротивление и нелинейная ёмкость; L - индуктивность; £(t) - воздействие системы.
Уравнение может быть записано в виде системы стохастических дифференциальных уравне- ний первого порядка duA
—L = и
dt
2’
du2 _ u2 ux 1 dC ( u V du1 dt RC^ LC^ C ( u ) du1 ( dt
+
5 (t, X ) + П (t) LC (u) ,
где 5 ( t , X )
- сигнал; n ( t ) - шум.
Ф у н кц и о н а льн ая с хе ма м од е ли ро в а н ия, у д овле творяющ а я ро б а с тн ом у а лгори тму об ра б отки информации (1)–(2) , п ре дс та в ле н а н а ри с . 1.
Ди ффере н ц и рующе е зв е н о в э ле к три че с к ой схеме, представленно й на ри с. 1, н еоб хо д и мо д л я п ол учен ия роба с тн ых с войств и сс лед у е мой н е л и н е й н ой с тохас ти че ск о й д и н а ми че ск ой с и с те мы . Па ра м е тры фи льт ра можн о с чи та ть кон с та нтами. Воздействие на систему e ( t ) представляет соб ой с м е с ь п ол е зн ого с игн а ла ( в д а н н ом слу ча е э то п рямоу гольн ый в и д еоимп у льс) и б е лого шума n ( t ).
Рис. 1 Электрическая схема робастного фильтра: e ( t ) – воздействие на систему; L , R , C , - параметры фильтра; d/dt – дифференцирующее звено
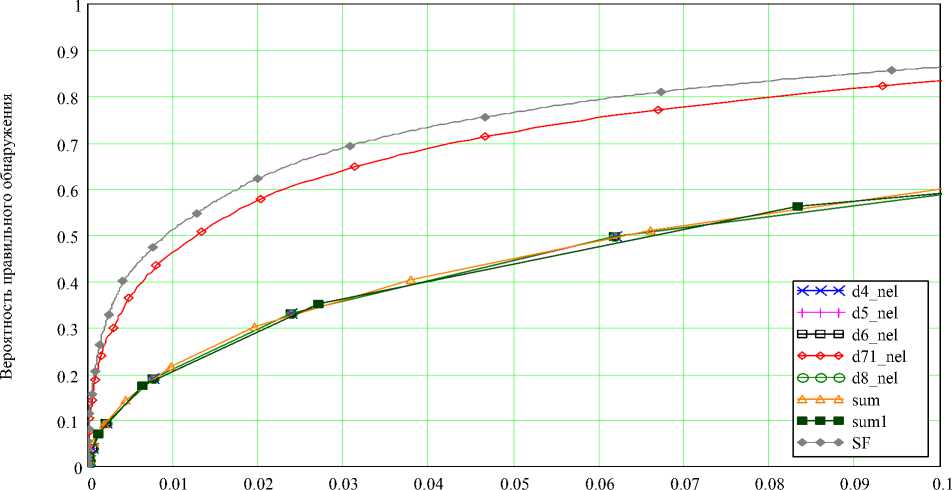
Ст ат ист ич еско е м ат ем ат и ч ес кое моделирование проводилось с использова нием м ет о да Рунг е – К у тты чет в ерт ого п оря дка с к он е чн ыми ра зн ос тям и [ 4] . В связи с недостаточными математиче ск и м и и в ычи сли те л ьн ыми ре с урсами приходится ограничиваться только ра бочими ха р а к тер и сти к а ми и с сле д у е мой с исте мы. Н иже представлены семейства рабочих харак те ри с тик ( РХ) н е л и н ейн ого ро б ас тн ого обнару жи те л я с о зн а че н и ям и С К О = 0,7 и Um = 0,5 (рис. 2) и со значениями в двое м ен ьш е и с хо д н ых з н а че н и й ( ри с . 3) .
Проц е сс мод ели ров а н и я РХ предполагает использование статистического ме тод а , к от оры й и спол ьзуетс я д ля п олу че н и я б ольш о го чи с л а реа ли з а ц и й ( п орядк а 10 5) стохастического процесса.
На гра фик а х п ред с та в лен ы Р Х н е ли н е й н ы х а лго ри тмов d4_nel, d5_nel, d6_nel, d8_nel и их сумма sum (в случае sum 1 од и н к а н а л, а и ме н н о d8_nel, вычитается), а также представлен линейный d71_nel и согл а с ов а нн ы й л и н е й ны й фи л ьтр SF.
Вероятность ложной тревоги
Рис. 2. Рабочие характеристики: значение СКО = 0,7; амплитуда прямоугольного импульса Um = 0,5
Вероятность ложной тревоги
Рис. 3. Рабочие характеристики: значение СКО = 0,7/2; амплитуда прямоугольного импульса Um = 0,5/2
Исходя из полученных рабочих характеристик исследуемой динамической системы, можно сделать вывод, что многоканальная робастная обработка информационных сигналов работает эффективнее согласованного и квазиоптимального линейного фильтра, который в основном применяется в радиотехнических системах для обработки радиолокационных сигналов. Такое повышение помехоустойчивости робастных методов обработки сигналов обусловлено автоматической стохастической накачкой за счет шума.
Согласно рис. 2, а также рис. 3 повышение помехоустойчивости для многоканальной робастной обработки (кривая sum1) составляет порядка 2 дБ по сравнению с согласованной фильтрацией (кривая SF) и более 3 дБ для парциальных робастных каналов.
Интересно, что помехоустойчивость отдельных каналов (d4_nel, d5_nel, d6_nel, d8_nel), согласно результатам моделирования, остается хуже согласованной фильтрации и линейного алгоритма.
На рис. 4 и 5 представлены РХ системы, в которой за счет уменьшения амплитуды сигнала и уменьшения разброса шума реализовано меньшее влияние нелинейности. Как видно из рис. 4, 5, все нелинейные каналы, а также их сумма, сходятся в одну кривую.
Вероятность ложной тревоги
Рис. 4. Рабочие характеристики: значение СКО = 0,7/20; амплитуда прямоугольного импульса Um = 0,5/20
Вероятность ложной тревоги
Рис. 5. Рабочие характеристики: значение СКО = 0,7/40; амплитуда прямоугольного импульса Um = 0,5/40
При многократном уменьшении значения среднеквадратичного отклонения(СКО) и амплитуды сигнала наблюдается полная сходимость РХ нелинейных алгоритмов.
Таким образом, можно сказать, что при малом значении СКО и амплитуды сигнала нелинейные свойства системы будут проявляться крайне слабо. То есть нелинейная робастная система в таком случае будет стремиться к линейной. Это свойство может использовано, например, в РЛС с малыми вероятностями ложных тревог [5].
Выводы
Метод робастной многоканальной нелинейной обработки сигналов может применяться для повышения помехоустойчивости в радиотехнических системах или других системах обработки информации, где необходимо высокое соотношение сигнал/шум. В частности, могут применяться для обработки радиолокационных сигналов и изображений.
Применение такого простого опорного сигнала как прямоугольный видеоимпульс и использование многоканальной робастной обработки дает прирост помехоустойчивости за счет автоматической стохастической накачкой шумом. В то время как использование сложных сигналов, например, таких, как радиоимпульс, даст еще больший прирост. Из всего этого следует, что робастные многоканальные методы обработки информации наиболее эффективны по сравнению с существующими методами и в перспективе могут быть применены для обработки космических радиолокационных сигналов в сложных радиотехнических системах.
В статье приведено моделирование и исследование четырехканальной робастной парциальной стохастической системы обработки сигналов на фоне белого шума. На основании рабочих характеристик можно сделать вывод о том, что повышение помехоустойчивости составило около 2–3 дБ.
Список литературы Робастные методы обработки космических радиолокационных сигналов и изображений
- Хьюбер, Дж. Робастность в статистике: пер. с англ./Дж. Хьюбер. М.: Наука, 1984. -304 c.
- Неволин, В.И. Робастные информационные системы. Методы синтеза и анализа/В.И. Неволин. М.: Радио и связь, 2008. 312 с.
- Радиолокационные системы землеобзора космического базирования/B.C. Верба, Л.Б. Неронский, И.Г. Осипов, В.Э. Турук. М.: Радиотехника, 2010. 680 с.
- Волков, Е.А.Численные методы/Е.А. Волков. Спб.: Лань, 2008. 248 с.
- Идентификация сигналов изображения робастными системами со стохастической накачкой/В.И. Неволин, М.Б. Меренков, Д.В. Иванеев, М.А. Зуйкова//Журнал радиоэлектроники: электрон. журн. 2013. № 1. http://jre.cplire.ru/jre/jan13/10/text.pdf
