Робастные самонастраивающиеся линейные и нелинейные системы управления динамическими объектами с сигнальной адаптацией

Автор: Бакланов Александр Сергеевич, Вохрышев Валерий Евгеньевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 6-1 т.16, 2014 года.
Бесплатный доступ
Исследованы статические и динамические свойства самонастраивающихся с сигнальной (пассивной) адаптацией робастных структур линейных и нелинейных автоколебательных систем стабилизации с полной инвариантностью статических ошибок при постоянных воздействиях без использования интегрирующих элементов в основном контуре системы. Показано, что системы обладают низкой чувствительностью к вариациям параметров объекта и управления, обладают большей «живучестью». Проведены методом компьютерного моделирования сравнительные исследования качественных характеристик переходных процессов в самонастраивающихся системах с предложенными алгоритмами в условиях параметрических и сигнальных возмущений.
Робастная система, самонастраивающийся алгоритм, сигнальная адаптация, чувствительность динамических систем, релейная система управления, статическая ошибка
Короткий адрес: https://sciup.org/148203532
IDR: 148203532 | УДК: 621.6-52
Robust self-adapting linear and non-linear automatic systems of direction by dynamic objects with signal adaptation
The article researches static and dynamic characteristics of the self-adapting robust linear and non-linear automatic oscillation systems with passive adaptation and stabilization on the basis of full invariant of static mistakes under constant influences without using integrated elements in a main contour of the system. It’s shown that systems possess low sensitivity to variations of objects and direction and have big robustness. The quality properties of transitive processes in self-adapting systems with given algorithms in the conditions of parametrical and signal revolts are comparatively investigated by method of computer modeling.
Текст научной статьи Робастные самонастраивающиеся линейные и нелинейные системы управления динамическими объектами с сигнальной адаптацией
ми системы и могут быть определены аналитически или методом компьютерного моделирования по ее математическому описанию [2]. Однако возможность их уменьшения с использованием известных методов оказывается ограниченной (условиями устойчивости и местом приложения возмущающих воздействий в астатических системах). Ниже предлагается и исследуется новый закон управления [3], обеспечивающий улучшение динамических свойств систем стабилизации и полную инвариантность статической ошибки при задающих и возмущающих воздействиях в статическом режиме без интегрирующих элементов в основном контуре системы.
Решение осуществляется введением в замкнутую систему дополнительной (параллельно единичной) положительной обратной связи:
t
U ос = k 1 - J (x0 — x(t))dt , где x(t) – текущее значение регулируемой координаты, k1 постоянный коэффициент.
На рис.1 представлена структурная схема самонастраивающейся системы (СНС).
Дополнительная обратная связь вместе с входящим в него исполнительным устройством в виде интегрирующего звена выполняет функцию контура сигнальной (пассивной) адаптации. Закон управления объектом определяется соотношением u (t) =
k 2 x 0
t
- x(t) + k 1 - J (x0 — x(t))dt
k.
Коэффициент k 2 < 1 в прямой цепи системы позволяет при больших отклонениях регули-
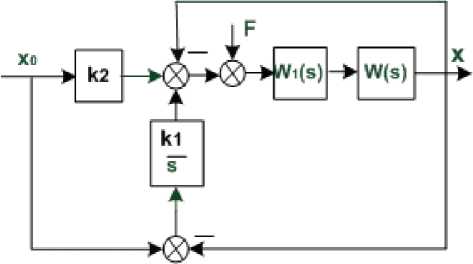
Рис. 1. Структурная схема самонастраивающейся системы:
W(s) – передаточная функция объекта, W 1 (p)=k – пропорциональный регулятор, k 1 и k 2 – постоянные коэффициенты, к 2 < 1 .
X — регулируемая координата; X 0 - уставка
X(t) . .,
(- + к 2 ) ■ W (p) ■ W(p)X 0 p
k
1 + — ■ W (p) ■ W(p) p
p . 0
W (p) ■ W(p) ■ f
к
1 + л ■ W (p) ■ W(p))
= X 0
p
p . 0
руемой координаты (например, при пуске, когда x 0 >> x ) обеспечить плавный перевод объекта в заданное состояние без перерегулирования. Интегрирующее звено, включенное в контур самонастройки, выполняет автоматическое масштабирование задающего воздействия (уставки) х 0 в функции ошибки и позволяет при соответствующем выборе коэффициентов k , k 1 и k 2, обеспечивающих сходимость процессов в системе во всем ограниченном диапазоне изменения параметров объекта и среды, устранять статические ошибки при действии как задающих, так и возмущающих параметрических и сигнальных воздействий без интегрирующих звеньев в прямой цепи управления. Динамические свойства данной структуры при F(s) = 0 определяются передаточными функциями в замкнутом и разомкнутом в основном контуре состояниях, которые имеют вид (4) и (5):
(к 2 + ^ ) ■ W 1 (s) ■ W(s)
W 3c (s) =-------- k -------------------; (4)
1 + ( 1 + k 1 ) ■ W 1 (s) ■ W(s))
s
(k 2 + k 1 ) ■ W 1 (s) ■ W(s)
W рс (s) =----^-------------- . (5)
1 + ■ W 1 (s) ■ W(s))
s
Записав эти соотношения в операторной форме в виде дифференциальных уравнений, можно показать, используя теорему о предельном переходе, что x 0 = X ( t ) как в замкнутой, так и в разомкнутой (в основном контуре) системах при X о = Const и f = Const.
Передаточная функция разомкнутой системы без контура самонастройки имеет вид:
W рс ( s ) = W 1 ( s ) ■ W ( s ) . (8)
В линейной системе предельное значение коэффициента усиления, при котором система еще сохраняет устойчивость, определяется в соответствии с критерием Найквиста [1,2] из соотношения (9) путем составления уравнений для мнимых и действительных его частей
A ( jrn ) = — k пр , (9)
где A ( jo ) - характеристический полином частотной передаточной функции (8), k пр - предельное значение коэффициента усиления, равное k пр = k ■ ko , ko - коэффициент усиления объекта. Предельное значение коэффициента усиления характеризует запас устойчивости системы к действию параметрических возмущений на объект.
Если передаточная функция разомкнутой системы имеет вид k • к
Wpc (s ) =-------------o---------- р (T1 s +1 )(T2s +1 )(T3s +1) , (10)
то предельное значение коэффициента усиления системы, как произведение коэффициентов усиления регулятора и объекта, получим из решения соотношения (9)
k
пр
=
T 1 T 2 T 3
Для определенности положим
T 1 = 1 сек , T 2 = 0.5 сек , T 3 = 0.1 сек .
Тогда k п р = 19.8 .
При этом динамические свойства СНС оказываются не хуже динамических свойств системы, содержащей в основном контуре ПИ-регулятор. Действительно, передаточная функция замкнутой системы с ПИ-регулятором имеет вид
xO) . .
(- 2 + к) ■ W(p) ■ W(p)X o
___p__________
1 + ( 1 + -) ■ W(p) ■ W(p))
p J p .
W(p) ■ W(p) ■ f
1 + ( 1 + -) ■ W(p) ■ W(p))
= x ; (6)
(k з + k4-) ■ W (s)
W зс ( s ) = -----------^-------------. (11)
1 + (k з + -4- ) ■ W(s))
s
Если приравнять уравнения (4) и (11), то при k 2 = 1
k 3 = - и , k 4 = k 1 k (12)
они совпадают.
При изменении параметров системы в качестве меры робастности используют дифференциальную чувствительность системы, под которой
понимается отношение изменения ее передаточной функции к изменениям передаточной функции (или параметров управления) при условии их малости. Чувствительность замкнутой системы (4) к изменению коэффициента усиления регулятора в основном контуре определяется соотношением [2]:
∂ W W
С " зс ______ зс 1
W 1 ∂ W 1 W зс
1 + ( 1 + k1- )W W s
Чувствительность же системы (11) к изменению коэффициента усиления регулятора k 3 будет иной (в k 3 раз больше чувствительности системы (4)):
∂ W k k
V ” зс __ _____ зс 3 __ _____________3____________
3 d k 3 W 3C 1 + ( к 3 + k 4) • W
s
Чувствительность системы (11) к изменению передаточной функции объекта W(s) будет равна ности к изменениям параметров управления и затрат на обслуживание.
Нелинейные автоколебательные системы. Большой класс нелинейных автоколебательных систем образуют релейные системы управления, обладающие простотой конструкции, алгоритмической и программной реализацией, высоким быстродействием, надежностью и высокой степенью инвариантности к вариациям параметров объекта [4]. Простейший релейный закон управления при симметричном управляющем воздействии имеет следующий вид:
U _ B • sign ( M ( x )) , (16) где M ( x ) – функция переключения, M(x) _ x 0 — x(t) , sign - знаковая функция, sign ( M ( x ) =1, если аргумент функции больше нуля, и sign ( M ( x ) = -1, если аргумент функции меньше или равен нулю, В – величина управляющего воздействия.
При асимметричном управлении уравнение (16) принимает вид:
∂ W W 1
V ” зс __ _____ 3C __ 1 __ ________________________
W " 8 WW- "1 + ( к 3 + k ) W
s
.
Понятно, что чувствительности систем (4) и (11) к изменению передаточной функции W ( s ) при выполнении условия (12) будут совпадать.
Из соотношений (13) - (15) следует, что чувствительность систем (4) и (11) будет изменяться при изменении параметров объекта. Однако за счет изменения коэффициентов усиления k 1 и k 2 она может быть ограничена условиями устойчивости. При этом чувствительность системы (4) будет не больше чувствительности системы (11) к изменению параметров объекта.
Самонастраивающаяся система (4) проще в эксплуатации, поскольку коэффициенты k 1 и k расположены в разных, невзаимосвязанных контурах и могут настраиваться раздельно с обеспечением желаемых показателей переходных процессов. Следует также отметить, что структура СНС будет решать задачу стабилизации регулируемой координаты с устранением статической ошибки, как это следует из соотношения (7), в условиях обрыва отрицательной обратной связи в основном контуре, то есть она обладает большей “живучестью” по сравнению со стандартными схемами (с ПИ-регулятором в основном контуре). Можно также показать, что система рис. 1 сохраняет структурную устойчивость, если основной контур системы является астатическим.
Следовательно, управление, представленное в системе на рис. 1 оказывается предпочтительней во всех отношениях – отсутствия статических ошибок, запаса устойчивости, чувствитель-
B ,
0,
при M ( x ) > 0, при M ( x ) ≤ 0.
Внешние возмущающие воздействия и асимметричность управления вызывают смещение среднего значения автоколебаний относительно заданного, которое понимается здесь как статическая ошибка. Качество работы релейных автоколебательных систем обычно оценивается по величине амплитуды автоколебаний в установившемся режиме работы, а в переходном - временем затухания колебательных процессов, перерегулированием и числом колебаний, превышающих амплитуду автоколебаний в установившемся режиме работы.
Рассмотрим статику и динамику системы управления рис.1, в которой пропорциональный регулятор W 1 ( p ) заменен релейным регулятором с законом управления вида (18),
B(t) при M i (x) > 0 , 0 , при M 1 (x) ≤ 0 . (18)
где функция переключения
t
Mi (x) _ x о (t) — x(t) _ к2 xо — x(t) + k1 - J (xо — xcp )dt, хср – среднее значение амплитуды автоколе- x + x„ мах min баний, xср _----2----, xмах и xmin – экстремальные значения регулируемой координаты, B( t ) – величина управляющего воздействия,
t
B(t) _ B 0 + к 3 J (Z — A)dt , B 0 < B(t) < B 1, (19)
B 0 , B 1 – постоянные ограниченные величины, Z – заданное значение амплитуды автоколебаний A = x 0 - xэ , xэ – экстремальные значения регулируемой координаты.
Таким образом, управление (18) обеспечивает стабилизацию амплитуды автоколебаний и их симметричность относительно уставки в условиях неопределенности параметров объекта и среды путем изменения соответственно сигнала B( t ) и масштабирования уставки.
Гармоническая линеаризация нелинейности (18) при симметричных автоколебаниях и B( t ) = B 0 приводит к выражению:
W(A)=2⋅B0 .
π⋅A
Значения амплитуды и частоты автоколебаний для заданного объекта определяются из уравнения гармонического баланса [1]:
W ( jω )=
W ( A )
путем составления уравнений для мнимых и действительных его частей.
Понятно, что амплитуда автоколебаний в самонастраивающейся системе при прочих равных условиях в установившемся режиме работы будет не больше, чем в системе без самонастройки. Качественные же показатели и их особенности в переходном режиме в подобных системах проще выявить методом компьютерного моделирования с использованием модели одного и того же объекта (рис. 2).
Из рис. 2, где представлены процессы в релейной (с управлением (17)) и самонастраивающихся системах (с управлением (18)
при B(t) = B 0 и B(t) в виде соотношения (19) и увели-ченным на 30% коэффициентом усиления системы) с объектом (10), видно, что переключения управления в самонастраивающихся системах происходят в переходном процессе с опережением по отношению к уставке x 0 . В них существенно меньше перерегулирование, отсутствует статическая ошибка, за счет масштабирования уставки, а время затухания переходных процессов практически не превышает длительности переходного процесса в релейной системе без самонастройки.
ВЫВОДЫ
-
1. Исследованы статические и динамические свойства робастных самонастраивающихся линейных и релейных автоколебательных систем управления динамических объектов, алгоритмы которых обеспечивают полную инвариантность статических ошибок при постоянных задающих и возмущающих воздействиях без использования интегрирующих элементов в основном контуре.
-
2. Показано, что запас устойчивости в самонастраивающихся линейных системах не меньше, чем в системах, содержащих интегрирующие элементы в основном контуре.
-
3. Линейная система с исследованным алгоритмом проще в настройке, ее управление не превосходит по сложности реализации стандартный ПИ-регулятор, и она не теряет работоспособности при обрыве обратной связи в основном контуре.
-
4. Исследована чувствительность линейных систем к изменению параметров объекта и управления. Установлено, что чувствительность самонастраивающихся систем к изменению в ограни-
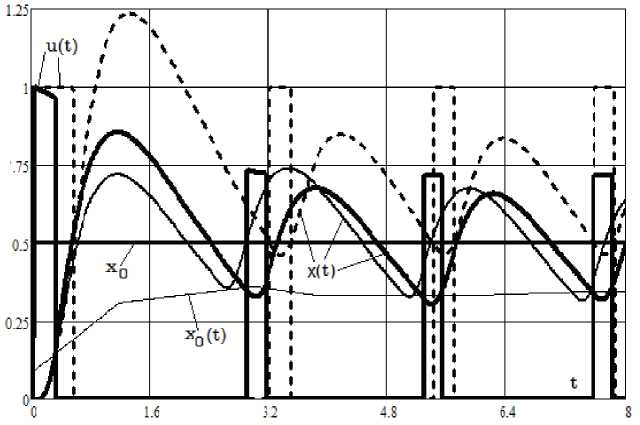
Рис. 2. Процессы в замкнутых релейных системах (объект (10): сплошные тонкие и утолщенные линии соответственно – самонастраивающиеся системы, в которых B( t) = B 0 и в виде соотношения (19) при увеличении ko на 30%, пунктирные – релейная система с управлением (17), k 2 = 0.1 )
-
5. Показано, что качественные характеристики переходных процессов в самонастраивающихся системах с исследованными алгоритмами в условиях параметрических и сигнальных возмущений оказываются не хуже, чем в системах, использующих стандартные управляющие устройства, а по некоторым показателям (в автоколебательных системах) существенно их превосходят.
-
6. Исследованный самонастраивающийся алгоритм управления релейными системами обеспечивает стабилизацию амплитуды автоколебаний и их симметричность относительно уставки в условиях неопределенности параметров объекта
ченном диапазоне параметров объекта при прочих равных условиях не больше, чем в системах содержащих ПИ-регулятор и существенно меньше – к изменению коэффициента усиления управления в основном контуре.
и среды путем изменения соответственно сигнала управления и масштабирования уставки.
Список литературы Робастные самонастраивающиеся линейные и нелинейные системы управления динамическими объектами с сигнальной адаптацией
- Дорф Р., Бишоп Р. Современные системы управления . М.: Лаборатория базовых знаний, 2002. 832 с.
- Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. 768 с.
- Вохрышев В.Е. Самонастраивающееся устройство для устранения статической ошибки в автоматических системах стабилизации динамических объектов. Пат. Российская Федерация. № 2505847. Опубл. Бюл. 2014, №3.
- Фалдин, Н.В. Релейные системы автоматического управления//Математические модели, динамические характеристики и анализ систем автоматического управления . М.: МГТУ им. Баумана, 2004. С.573-636.
