Роботизация фермерских хозяйств по обработке растений

Автор: Поезжаева Е.В., Васенин А.С., Шумков А.Г.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 3 (48), 2014 года.
Бесплатный доступ
Статья посвящена проектированию и расчету робота-садовника. В ней рассматриваются основные функции робота, строятся расчеты звеньев манипулятора, используются неординарные технические решения, позволившие сделать робота еще более независимым от вмешательства человека.
Полив растений, гусеничное шасси, глонасс-навигация, манипулятор, газонокосилка
Короткий адрес: https://sciup.org/142142887
IDR: 142142887 | УДК: 629.782.519.711
Robotization of farms for plants processing
The article is dedicated to the design and calculation of the robot gardener. It discusses the basic functions of the robot, calculations of manipulator units. Unconventional technical solutions are used to make robot even more independent of human control.
Текст научной статьи Роботизация фермерских хозяйств по обработке растений
Роботы постепенно занимают все больше места в нашей жизни. Это касается не только высокотехнологичных отраслей, но и вредных для человеческого здоровья производств, в частности химического производства. Однако в настоящее время все большую популярность приобретают роботы, помогающие человеку справляться с повседневными делами и заботами. Именно поэтому мы решили создать проект такого робота с элементами оптимизации его траектории, а также точности выполнения программы.
Цель работы разработка проекта робота с элементами оптимизации его траектории и точности выполнения программы.
При проектировании робота определенную трудность вызывает точность позиционирования манипуляторов. Для того чтобы позиционирование осуществлялось точно, необходимо, чтобы координаты q , i = 1 .. n были достаточно близки соответствующим значениям q Это означает, что в тех случаях, когда позиционирующая рука манипуляционной сис-i , ref - „ темы является большой и медленной, а манипулятор – малым и быстрым, инерционная позиционирующая часть ограничивает полосу пропускания всей системы. Кроме того, такой метод управления требует значительных величин моментов в степенях подвижности. Ниже предлагается подход, позволяющий обеспечить точную отработку p при меньшей точности движения позиционирующей руки p .
При проектирование робота определенную трудность вызывает точность позиционирования манипулятора. Уравнение движения n-звенного манипулятора может быть представлено в форме
M ( q ) q = n ( q, q ) + r, (1)
где M(q)- матрица инерции; n(q, t[) - вектор, включающий в себя кориолисовы центробежные члены, а также силы трения и тяжести; – вектор входных моментов. Взаимосвязь скорости и изменение положения в пространстве задания и скорости движения в угловой системе координат представляется соотношением p = J(q)q , (2)
где J ( q ) - матрица Якоби, Jtj = ppt / qqx .
С использованием рассчитанной по динамической модели линеаризующей развязывающей обратной связи системы (1) можно привести к n несвязанным двойным интегралом. В угловых координатах манипулятора его состояние определяется вектором z = [ z f , z f ] T , где zx=q и z2 = q .
Используя закон правления вида т = M (q)u - n (q, q), можно привести результирующую модель замкнутой системы к форме zi = z2, z2 = u,(4 b)
где u – вектор управления системой, представляющий собой n несвязанных между собой двойных интегралов. Состояние системы в пространстве задания определяется вектором T ~ ~
TT
^~ ^~ z 1 , z 2
~
z
, где z i = p и z2 = p. Закон управления вида т = M(q) J 1 (q)[u - J(q)q] - n(q, q), (5)
для уравнения (5)с учетом p = J(q) q^J(q)q (6)
приводит также к несвязанным двойным интеграторам.
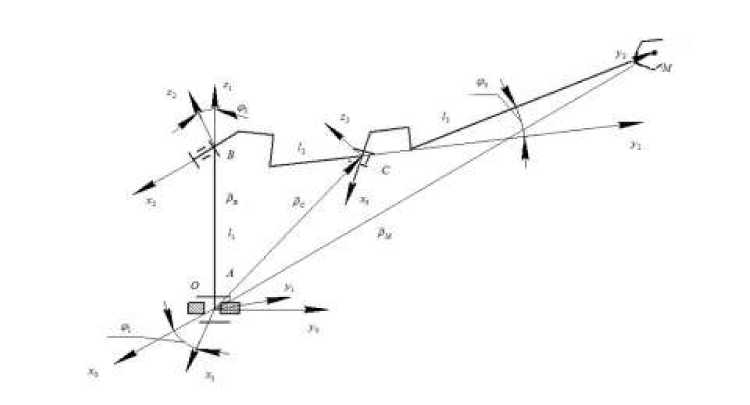
Рис. 1. Схема манипулятора робота-садовника
Кроме того, контроль точности позиционирования можно осуществить использованием свойств векторов и нахождением радиус-векторов. Исходные величины после поворота на некоторый угол в первом шарнире могут быть найдены по формуле Родриго:
—► —► *■ —► ^ ► *■ i/ ) =is •cos(Z>1+(kxis)-sin ^+ (1-008^)•(kxis)• k, (7)
где i , k - единичные векторы (орты) декартовой системы координат; s - число осей единичного вектора, s = 2; 3 [2].
Произведение трех векторов последнего слагаемого вышеприведенного уравнения равно 0, так как векторы коллинеарны между собой и ортогональны вектору k , следовательно, получим:
i — (1) = is • cos ^ + ( к х is ) • sin ф ,. (8)
Обращаясь вновь к (7), производим те же самые действия после поворота во втором шарнире:
Is2) = L-cos^2+(F2x js )-sin^2, где j – единичный вектор декартовой системы координат, s = 2; 3.
Подставив в формулу (9) выражение (8), получим:
—► —► —► — —► —► j (2) j cos 2 i cos 1 (k i ) sin 1 j sin 2
j cos i j cos sin i sin sin ,
где s = 2; 3. Третий поворот осуществим вокруг вектора j (2) .
После определения векторов, задающих положения векторов и звеньев, легко находятся радиусы-векторы точек механизма:
——
Pb = k k; ;
——
——
С l 1 k l 2 j 2 ;
P M= l,-k+l 2J2 +l 3-
При управлении движением рассматриваемого класса манипуляционных систем по заданной траектории представлена конструкция робота, который включает в себя гусеничную платформу с установленными на ней манипуляторами, газонокосилкой, ультразвуковыми датчиками.
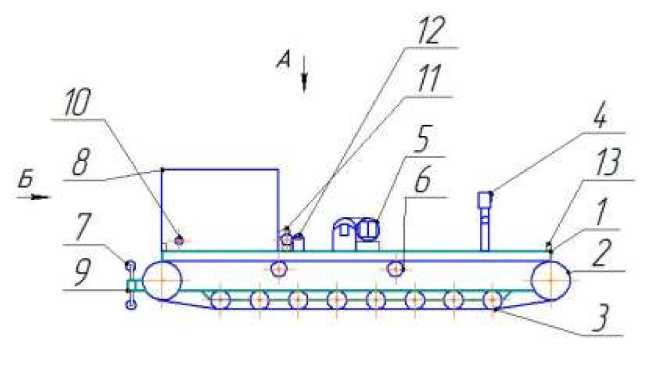
Рис. 2. Конструкция робота:
1 – корпус; 2 – направляющее колесо; 3 – трак гусеницы; 4 – камера; 5 – манипулятор;
6 – ролик натяжителя гусеницы; 7 – опорный ролик сегментной косилки; 8 – емкость для воды;
9 – сегментная косилка;10 – заливное отверстие бака;11 – поливочный шланг;
12 – манипулятор полива;13 – ультразвуковой передатчик;14 – катушка с поливочным шлангом;
15 – схват манипулятора
Для того чтобы научить робота видеть пространство, использовался прием эхолокации, применяемый в автомобильном парктронике. На каждой из четырех сторон робота было размещено по одному датчику, позволяющему сканировать окружающее пространство в режиме реального времени. При возникновении препятствия робот при помощи процессора выбирал заранее запрограммированный алгоритм движения, после чего следовал ему.
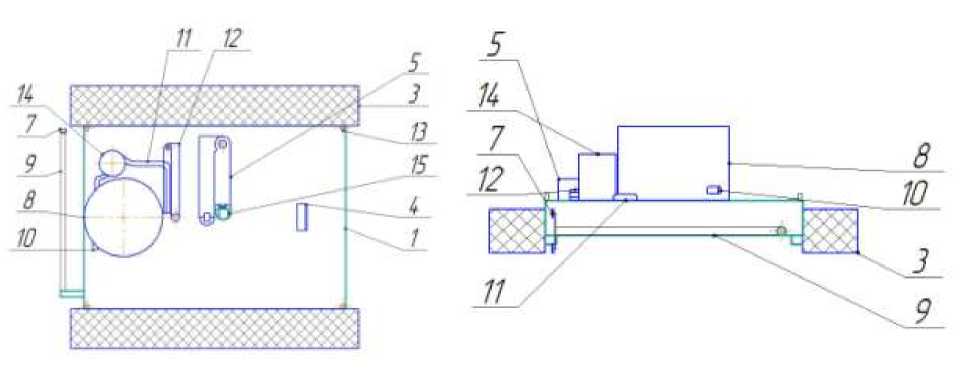
по стрелке А по стрелке Б
Рис. 3
Кроме того, эти же самые датчики можно установить на манипулятор для более полного получения «изображения» действительного нахождения объекта и увеличения точности позиционирования манипулятора робота при выполнении какого-либо алгоритма движения. Еще одним немаловажным аргументом в пользу ультразвукового ориентирования является возможность разместить по краям участка ультразвуковые приемники, которые будут помогать роботу ориентироваться в пространстве и более точно определять свое положение.
