Роботизация нанесения дорожной горизонтальной разметки

Автор: Поезжаева Е.В., Юшков В.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 1-3 т.13, 2011 года.
Бесплатный доступ
В данной статье рассматривается робототехнический комплекс предназначенный для нанесения горизонтальной дорожной разметки с целью повышения безопасности дорожного движения. Представлена схема системы управления данным комплексом и приведен расчет погрешности положения. Рассмотрена возможная оснащенность комплекса и возможность его эксплуатации.
Автомобильная дорога, горизонтальная дорожная разметка, система управления, манипулятор
Короткий адрес: https://sciup.org/148199681
IDR: 148199681 | УДК: 629.782.519.711
Robots for drawing the road horizontal marking
In given article the robotics complex intended drawing the horizontal road marking for purpose of increase traffic safety is considered. The control system scheme is presented by the given complex and calculation of position error is resulted. Possible equipment of complex and possibility of its operation is considered.
Текст научной статьи Роботизация нанесения дорожной горизонтальной разметки
совершать длительные переезды, водители большегрузного транспорта, как и «перегонщики» легковых автомобилей из Европы, стремятся скорее доехать до пункта назначения и часто управляют автомобилями в экстремальном состоянии. Для предотвращения съезда автомобиля с дороги нами разрабатываются методы снижения аварийности на дорогах с помощью устройства разметки.
Одним из способов снижения аварийности дорожного движения является применение виброполосы сплошной продольной разметки. Метод заключается в устройстве выемок глубиной до 10 мм, при ширине до 15 см и длине до 35 см вдоль дороги. Также предусматривается покраска такой виброполосы. Данный размер выемок был получен экспериментально и является наиболее подходящим для снижения аварийности на автомобильных дорогах. Для нанесение «виброполос» используется роботизированный комплекс, который имеет вибромеханизмы. Как только колесо грузовой или легковой машины, даже частично попадает на такую полосу, в салоне раздается резкий неприятный звук, похожий на звук, издаваемый стиральной доской, когда по ней проводят деревянной палочкой. Главная задача «виброполос» – разбудить засыпающих водителей или привлечь внимание отвлекшихся. В зимних условиях такие полосы должны ощущаться даже через снег и лед. При нанесении виброполосы необходимо использовать краску, что повысит видимость разметки с проезжей части.
Беспилотные машины впервые в истории доказали, что способны не просто работать в реальной обстановке (на местности), но самостоятельно преодолевать весьма протяженные маршруты. Автомобили должны были преодолеть сложный городской маршрут: проехать много перекрестков (разных типов) и поворотов, большие и маленькие улицы, заехать на парковку и выехать из нее, выполнить большое количество прочих маневров. Система управления должна обеспечивать управление движением и работой беспилотной машины, а также адаптивное управление ходовой частью и энергетической установкой с учетом взаимодействия транспортной системы с окружающей средой.
Система управления включает в себя ин-формационно-управляющую часть (аппаратуру управления, датчики, система технического зрения и микропроцессоры предварительной обработки информации), расположенную на робототехническом комплексе; пост оператора включает в себя: пульт управления, видеопросмотровые устройства, ЭВМ для обработки информации и комплект приемо-передающей аппаратуры, обеспечивающей передачу информации от робототехнического комплекса на пост оператора и управляющих команд от поста оператора на комплекс. Система управления движением должна также обеспечивать планирование движения в недетерминирован- ных условиях на основе картографической базы с учетом непрерывно поступающей информации в систему управления от технических органов чувств и навигационной системы.
Беспилотная машина для нанесения горизонтальной виброполосы дорожной разметки должна работать в автономном режиме. Сложность системы управления определяется сложностью решаемой задачи, степенью неопределенности внешней среды и требуемой степенью автономности работы. На рис. 1 представлена схема управления данным робототехническим комплексом.
Машина нанесения виброполосы должна содержать в своем составе:
-
- спутниковую навигационную систему (ГЛОНАСС/GPS);
-
- устройства радиолинии видовой и телеметрической информации;
-
- устройства командно-навигационной радиолинии;
-
- устройство обмена командной информацией;
-
- устройство информационного обмена;
-
- устройство хранения видовой информации.
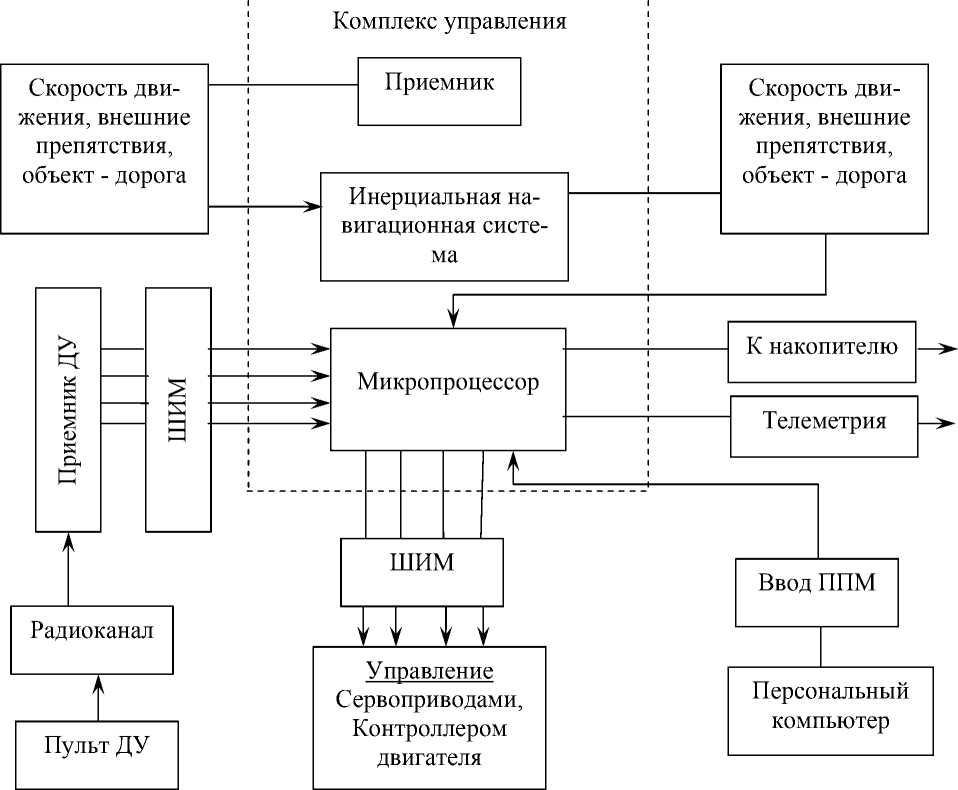
Рис. 1. Функциональная схема управления робототехническим комплексом
Современные телевизионные камеры обеспечивают представление оператору в реальном времени картины наблюдаемой местности в формате наиболее близком к характеристикам зрительного аппарата человека, что позволяет ему свободно ориентироваться на местности и при необходимости выполнять процесс нанесения виброполосы. Устройство информационного обмена обеспечивает распределение видовой информации между бортовыми источниками видовой информации, передатчиком радиолинии видовой информации и бортовым устройством хранения видовой информации. Данное устройство также обеспечивает информационный обмен между всеми функциональными устройствами. Спутниковая навигационная система обеспечивает привязку координат беспилотной машины и наблюдаемых объектов по сигналам глобальной спутниковой навигационной системы ГЛОНАСС (GPS). Спутниковая навигационная система состоит из одного или двух приемников с антенными системами.
В настоящее время потребителей робототехнических комплексов интересует не то, каким образом достигается повышение точности робота, а каковы количественные оценки точности робота в целом, в частности оценки погрешностей позиционирования (рис. 2). Погрешность положения оценивается следующими параметрами [3, 4]:
-
- средними значениями отклонений координат характерной точки конечного звена:
х0-х, у0-у, z0-z, где х0, у0, z0 – значения координат точки в неподвижной системе OXYZ, заданные программой; х, у, z – средние значения координат характерной точки в n реализациях программы выхода в заданную точку.
nnn x=∑xjIn; y = ∑yj/n; z = ∑zj/n, 1 1 1
где x j , y j , z j – соответствующее значения координат в j-ой реализации.
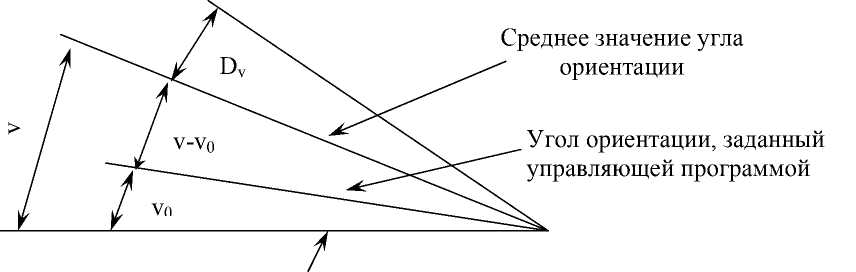
Начало отсчета угла ориентации
Рис. 2. Погрешность ориентации робототехнического комплекса
-
- значением радиуса:
R0-R= (x0-x)2+(y0-y)2+(z0-z)2;
-
- средними значениями углов ориентации:
v0 -v, ψ0 -ψ, ϕ0 -ϕ,
где v 0 , ψ 0 , ϕ 0 - значения углов Эйлера в положении конечного звена, заданном управляющей программой; v, ψ , ϕ - средние значения углов ориентации.
v=∑n vj n; ψ =∑n ψj n; ϕ=∑n ϕj n;
1 1 1
где v j , ψ j , ϕ j - значения углов ориентации при j-ой реализации программной позиции.
Повторяемость положения и ориентации робототехнического комплекса определяется величинами D + 3SD.
n
∑n (Dj -D)2/(n -1),
Dj = (xj -x)2 +(yj -y)2 +(zj -z)2,
Dv = 3
n
∑(vj- v)2 (n - 1),
D ψ= 3
n
∑(ψj -ψ)2/(n-1),
n
D ϕ= 3 ∑ ( ϕ j -ϕ )2 (n - 1), 1
где Dv, D ψ , D ϕ , D - среднее значение радиуса отклонений характерной точки от среднего положения; SD – среднее квадратическое отклонение этого радиуса; Dv, D ψ , D ϕ - дисперсии углов ориентации.
Круг материалов, технологий, а также новых методов нанесения дорожной разметки с целью повышения безопасности дорожного движения постоянно расширяются. Выбор оптимальных решений является сложной задачей, требующей учета как технических, так и экономических факторов. Анализ результатов применения различных материалов и технологий становится все более важным с точки зрения продления срока службы дорожной разметки, повышения ее эффективности.
Список литературы Роботизация нанесения дорожной горизонтальной разметки
- Зенкевич, С.Л. Управление роботами/С.Л. Зенкевич, А.С. Ющенко. -М.: Изд. МГОУ им. Н.Э. Баумана, 2000. 380 с.
- Гост Р 51256 -99. Дорожная разметка и ее характеристики.
- Корендясев, А.И. Теоретические основы робототехники: в 2 кн./А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес; отв. ред. С.М. Каплунов. -М.: Наука, 2006. Кн. 1. 383 с.; Кн. 2. 376 с.
- Поезжаева, Е.В. Промышленные роботы: учеб. пособие: в 3 ч. Изд. ПГТУ 2009. 163 с.
