Роботизация ремонта дорожного покрытия

Автор: Поезжаева Е.В., Колегов Д.Ю., Зотов И.А., Кардаш К.А.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 3 (42), 2013 года.
Бесплатный доступ
В данной статье предлагается наиболее современный способ ремонта дорожного покрытия, а именно образовавшихся трещин и ям.
Робот, дорожное покрытие, манипулятор, позиционирование, ремонт, турбина, вибрации звеньев
Короткий адрес: https://sciup.org/142142694
IDR: 142142694 | УДК: 629.782.519.711
Robotization of road surface maintenance
The paper presents the most modern way of road surface maintenance, particularly cracks and pits repair.
Текст научной статьи Роботизация ремонта дорожного покрытия
Робот, который способен отсканировать дорожное покрытие на наличие повреждений и устранить их, предполагает использование спутниковой системы для передачи точных координат участка дороги, а также для контроля процесса ремонта дорожного покрытия человеком. В функции машины входит ремонт дороги способом частичной замены верхнего слоя дороги, а также заполнение недостающего слоя асфальтом (рис. 1).
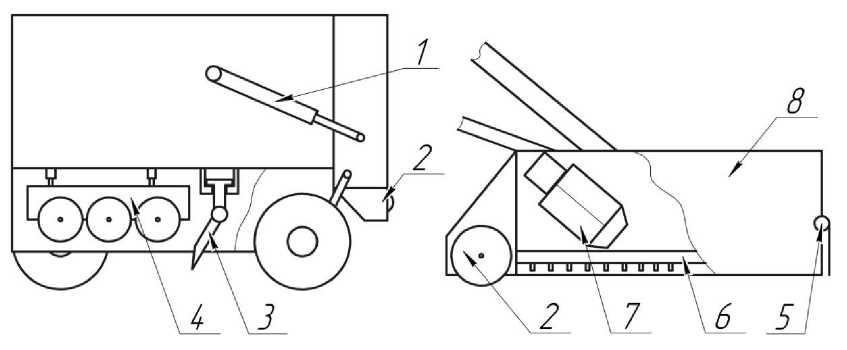
Рис. 1. Модель робота
Благодаря тому что робот самостоятельно ремонтирует дорожное покрытие, значительно ускоряется процесс ремонта дороги и уменьшаются расходы. В устройство робота входит гидроцилиндр 1, за счет которого платформа 8 плавно опускается на поверхность дороги. В центре платформы находится турбина 7, которая продувает поврежденный участок дороги. В нижней части расположен нагревательный элемент 6, разогревающий поверхность асфальта до 120° C. На задней части имеется барабан 2, который позволяет разрыхлить разогретый участок дорожного покрытия за счет игольчатой поверхности, а на передней – за- слонка 5, открывающаяся при продувке ямы, благодаря чему весь мусор удаляется наружу. В центре робота находится манипулятор 3, который принимает показания бортового компьютера о форме повреждения дорожного покрытия и глубине ямы и заполняет участок асфальтом в определенном объеме. Позади манипулятора имеется виброкаток 4, который уплотняет и выравнивает ремонтируемую поверхность.
При эксплуатации робота его транспортируют на участок дороги, который необходимо отремонтировать. Координаты данного участка робот получает через спутниковую связь. При этом он обозначается специальной световой сигнализацией и знаками. Далее робот сканирует поверхность дороги в попутном направлении движения транспорта на наличие повреждений и при их обнаружении останавливается, опуская платформу на яму. Идет продувка от мусора, и после завершения осуществляется прогрев до 12° С. После этого робот, не поднимая платформу, начинает движение, автоматически включая барабан, который обрабатывает нагретую поверхность. Одновременно датчик сканирует яму, определяя ее контур и глубину. Платформа поднимается. Получая данные с датчиков, бортовой компьютер определяет схему движения манипулятора и количество требуемого асфальта. Манипулятор, получив сигнал от компьютера, укладывает асфальт. Минимальная температура укладки асфальта +10° С, температура асфальта 120° С, слой асфальта должен быть выше уровня поверхности дороги на 2 3 см. Далее, по ранее заданной программе, робот продолжает движение и опускает виброкаток, который выравнивает и утрамбовывает участок покрытия. Через спутниковую связь ставится отметка на карте для контроля качества и долговечности. Далее цикл повторяется.
При эксплуатации роботов часто возникают вибрации, которые приводят к снижению точности и эффективности выполнения заданных операций. Причина этого заключается в том, что предположение о жесткости конструкции робота часто оказывается слишком грубым. Проблема управления гибкими манипуляторами имеет огромное значение. Ниже предложен метод управления одно- и двухзвенным манипулятором с учетом гибкости его звеньев и соединений между ними.
Модель звена робота изображена на рисунке 2.
У
Е1
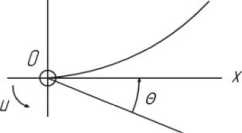
Рис. 2. Модель звена
Она представляет собой стержень, один конец которого связан с неподвижной точкой О. Стержень может вращаться относительно неподвижной точки под действием управляющего момента U. Система координат X, Y связана со стержнем и вращается вместе с ним. Дальше рассматриваем только те колебания системы, которые вызваны наличием момента изгиба. Уравнение Эйлера для вращающегося стержня имеет вид:
dzy д*у рА^^Е1й—-^ = й at? ох* ,
где р – плотность; E – модуль Юнга; ^а — момент инерции площади поперечного сечения; A – площадь поперечного сечения; y (x, t) – отклонение стержня от оси X в точке x в момент времени t.
Краевые условия для уравнения (1) задаются соотношениями:
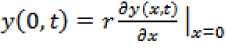
a^yC^t) I _ БГдг а2у I St2 L=0 js 5^2 Lr=O

где I – длина стержня; r – радиус соединения; ^5 – момент инерции стержня. Воспользуемся
методом разделения переменных и будем искать решение уравнения (1) в виде y (x,
t)=a(t) (x), где (x) – функция моды.
Из (1) и (2) получаются следующие уравнения и краевые условия:
''''(x)-к4ф(лг) = 0 | с5к*ф^ +--^ (0) - —(0) = 0
0(0) - гф№> = 0
,
2 L4
C = ""7 '
где pA - положительная контстанта.
Функции мод 02 (x) должны удовлетворять условию ортогональности: Д1 Ф1 (х^ф^йх + ^ф' /о)ф';(0) = <5у.
Из (3), (4) можно получить уравнение собственных чисел , имеющее счетное количество решений Я^ = /с ^/5 i = 1,2,..... . Чтобы получить динамические уравнения, которые можно было бы использовать для моделирования движения робота, ограничимся конечным числом N мод 0 г И- Движение стержня, рассматриваемого как абсолютно твердое тело, является составляющей общего движения системы и описывается соотношением:
gLdW = v^(t).
где ^ — ^а "^" ^5 . Если уравнения для функций времени ajCOG = I-»), которые выводятся из (1), рассмотреть совместно с соотношением (5), то будет получено следующее матричное уравнение:
£(t) = ЛХ(0 4- ЬиУГ),(6)
Вектор выходных характеристик следующим образом выражается через вектор состояний:
y=CX.(7)
Уравнения (6) и (7) являются уравнениями движения модели звена робота. Входящая в них функция управляющего момента может быть определена одним из двух способов:
u = rd- Ку(у - ут);(8)
^ = гй-Кя(Х-Хт-),(9)
где rd значение управляющего момента, рассчитанное при планировании движения; yr – заданный вектор выходных характеристик, который должен быть реализован системой управления; X – оценка вектора состояний X; Xr – заданный вектор состояний.
Были проведены эксперименты, в которых изучалось поведение звена робота, обладающего одной степенью подвижности, при использовании управлений вида (8) и (9). В начальный момент времени робот совершал колебания с основной частотой 0,6 Гц. Целью управления являлась стабилизация заданного положения робота. В этом случае контролировать возникающие на движениях системы колебаний можно с помощью управления вида:
иг = rdi - ^(^ - ^rz) (f = 1,2). (10)
Для учета изменения момента инерции двухзвенника во время его движения коэффициенты обратной связи в (10) выбираются в соответствии с адаптивным законом регулиро- вания:
кц(Й = кц (0) - Эрц бц (О^ц (t)
Siu £ eu МУМ (11)
Схема экспериментальной установки, предназначенной для изучения поведения звена робота с двумя степенями подвижности, изображена на рисунке 3.
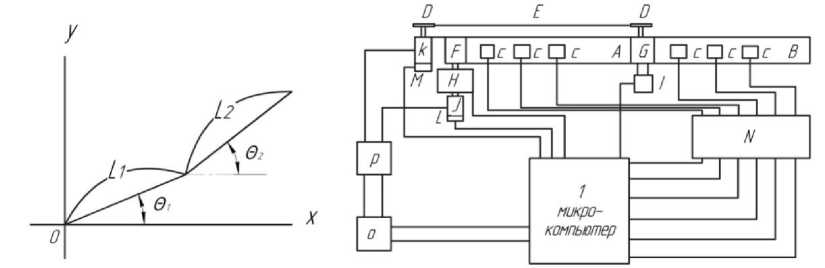
Рис.3. Схема установки где 1 – микроЭВМ; А – гибкое звено 1; В – гибкое звено 2; С – датчики напряжений; D – шкив; E – тросовая передача; F, G – соединения звеньев; H, I – датчики углов поворота; J, K – двигатели постоянного тока; L, M – тахогенераторы; N, O, P – усилители.
В процессе экспериментов осуществлялось позиционирование робота, первое звено которого совершало главные колебания с частотой 5 Гц, а второе с частотой 1 Гц. При этом использовалось управление, рассчитанное на абсолютную жесткость конструкции робота и построенное с учетом гибкости звеньев. Закон характеризуется минимальным временем переходного процесса и максимальной точностью позиционирования. Поскольку предложенный вид управления звеном робота вызывает затухание присутствующих в системе колебаний, это управление можно использовать для увеличения жесткости робота наряду с увеличением жесткости его механической конструкции. Кроме того, описанный вид управления может быть успешно применен для погашения колебаний манипулятора, возникающих при его соударении с внешними препятствиями. Один из подходов к управлению манипуляционным роботом в условиях знания его динамической модели и инерционных характеристик объекта манипулирования заключается в использовании методов адаптивного управления. Предлагается алгоритм управления с идентификацией неопределенных параметров, являющийся развитием метода управления.
Манипулятор рассматривается как последовательная цепь n звеньев. Управление движения манипулятора может быть представлено в виде
