Робототехника и автоматическое управление

Автор: Ковтун М.В.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 4 (94), 2023 года.
Бесплатный доступ
Для современных автоматизированных систем, выходящих за рамки типичных промышленных условий, абсолютная точность является одним из ключевых свойств, которые делают это возможным. Основной проблемой автоматизированных систем является калибровка движения робота, в частности во время движения платформы, на которой он установлен. В литературе существует несколько подходов к повышению точности робота для типичного промышленного робота, установленного на неподвижной раме. Напротив, не существует способа повысить точность робота, когда робот установлен на подвижной базе, что типично для коллаборативных (портативных) роботов. Поэтому в данной работе проанализированы различные подходы к повышению абсолютной точности робота, установленного на мобильной платформе, с использованием оптической измерительной системы.
Робототехника, системы управления, захват движений, приборостроение, автоматизация
Короткий адрес: https://sciup.org/140299485
IDR: 140299485 | УДК: 62-529
Robotics and automatic control
For modern automated systems that go beyond typical industrial conditions, absolute precision is one of the key properties that make it possible. The main challenge for automated systems is the calibration of robot motion, particularly during the movement of the platform on which it is mounted. In literature, there are several approaches to improving the accuracy of a typical industrial robot mounted on a fixed frame. However, there is no way to improve the accuracy of a robot when it is mounted on a mobile base, which is typical for collaborative (portable) robots. Therefore, this work analyzes various approaches to improving the absolute precision of a robot mounted on a mobile platform, using an optical measurement system.
Текст научной статьи Робототехника и автоматическое управление
НАУЧНЫЕ ДОСТИЖЕНИЯ ПО ТЕМЕ НАУЧНЫХ ИССЛЕДОВАНИЙ
В своей типичной конструкции роботы известны давно. История робототехники началась в Древней Греции с «автоматонов» — неэлектронных движущихся машин с подвижными элементами. Однако в современном понимании роботы появились в результате индустриализации как средства выполнения повторяющихся операций.
В последние годы активно развиваются два технологических направления, связанных с применением промышленных роботов.
Первое — системы, позволяющие людям или компьютерам управлять роботами в дистанционном режиме.
Второе — механические манипуляторные системы, такие как «руки» или «ноги», для передвижения и оперирования объектами.
Пилотный промышленный робот-манипулятор был создан в 1937 г. в виде небольшого крана. В 1942 г. сотрудники компании DeVilbiss Co. Виллард Поллард (Willard Pollard) и Харолд Роузланд (Harold Roselund) запатентовали программируемый механический распылитель краски. В разработку механических рук и ног большой вклад внес Уильям Уолтер (William Walter), сконструировавший первого автономного робота в конце 1940-х гг.
Первый компьютеризованный вращающийся электрический манипулятор был разработан в Технологическом институте Кейса при Университете Кейс Вестерн Резерв (Case Institute of Technology, Case Western Reserve University) в США. В 1969 г. в Стэнфордском университете (Stanford University) изобрели «программируемый универсальный манипулятор», выполняющий сложные сборочные операции, для целей автоматизации производства.
В настоящее время, как видно из рисунка 1, разработки в области робототехники увеличились во множество раз.
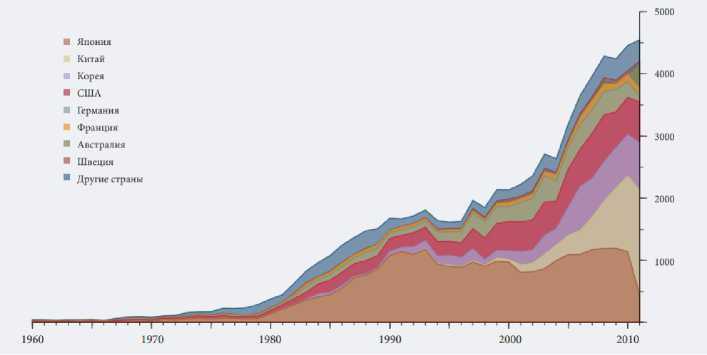
Рисунок 1 - Число патентных заявок в области робототехники с 1960 по 2011 гг. [1]
Робототехника - это сфера, объединяющая передовые достижения и разработки целого ряда научных дисциплин: электроники, радиотехники, механики, информатики и др.
Новые технологии для робототехники обеспечили процветание роботизированных механизмов в самых различных областях жизнедеятельности человека. Сегодня без роботов невозможно представить себе очень многие процессы, особенно в промышленности. Станки с ЧПУ, манипуляторы, автоматизированные производственные линии - не что иное как воплощение технологий робототехники.
Впечатляющие достижения человечества, такие как выработка энергии на электростанциях, переработка нефти, космические полеты, путешествия на самолетах, железных дорогах и автомобилях, и это лишь некоторые из них, стали возможными только благодаря прогрессу технологии управления.
В настоящее время особенно активно развивается роботизированная хирургия. Медицинские роботы берут на себя многие функции, которые раньше выполнялись врачами-хирургами.
Благодаря кибернетическим технологиям современный человек может вернуть утраченную часть тела. Огромный прорыв в медицине произошел с тех пор как появились бионические протезы, которыми люди управляют при помощи собственной нервной системы.
Медицинские экзоскелеты представляют собой целые роботизированные костюмы, предназначенные для восполнения утраченных функций, увеличения силы мышц человека и расширения амплитуды движений за счет внешнего каркаса и приводящих частей.
Роботизированные механизмы собирают образцы почвы и исследуют новые пространства в условиях, которые опасны для жизни человека: при повышенной радиации, экстремальных температурах и т.д.
Роботизированные устройства со специальными датчиками позволяют оперативно обнаруживать пожароопасные ситуации и успешно предотвращать их.
В условиях высокой конкуренции на промышленном рынке предприятия стараются сделать свои производственные процессы максимально эффективными. И помогают им в этом современные роботизированные технологии.
Чаще всего такие роботы представляют собой манипуляторы, напоминающие человеческую руку. Обычно эти универсальные устройства имеют несколько осей подвижности и фланец для закрепления рабочего инструмента.
Использование промышленных роботов значительно увеличивает производительность предприятий, в то время как человеческие ресурсы освобождаются для выполнений более важных задач.
Несомненно, инженерия управления представляет собой одну из ключевых технологий будущего, наряду с информационными технологиями. Разработка систем управления сыграла важную роль в развитии автоматизации и революциях в ней.
Важно, чтобы разработки в данном направлении продолжались, хотя основные последствия для дальнейших исследований и разработок в настоящее время в основном возрастают на более высоких системных уровнях, где расположены новые типы функциональных возможностей и интеллектуальные системы управления.
Вычислительная инфраструктура, обеспечивающая необходимое аппаратное обеспечение и программное обеспечение, уже доступна благодаря быстрому развитию информационных технологий.
Системы автоматического управления в настоящее время широко используются для выполнения задач, обычно встречающихся в производственных секторах, которые являются быстрыми, опасными или повторяющимися для людей. В связи с этим индустрия производства бытовой техники продемонстрировала высокий спрос на быстрые и эффективные способы тестирования новых продуктов, чтобы удовлетворить растущий спрос потребителей на высокопроизводительные приборы и конкурировать на рынке.
Применение мобильных манипуляторов полезно для освобождения людей-операторов от трудоемких задач, ускорения испытаний и повышения эффективности.
К примеру, устройство дорожного полотна из бетонной смеси является более экономичным, по сравнению с другими видами строительства.
Особенно эффективна прокладка дорог и магистралей, на очень большие и равномерные расстояния. В данном случае важным фактором является скорость и качество монтажа.
Процесс укладки бетонной смеси требует использования специальных геодезических приборов, которые, в свою очередь, позволяют выполнять "разбивочные работы". Для автоматизации процесса строительных работ используются такие устройства, которые могут обеспечить поддержание непрерывного уровня, при котором бетоноукладчик следует по заданной траектории, наклону и на проектной высоте [2].
Выравнивание действий вокруг продукта/услуги автоматических роботизированных систем может свести к минимуму перегрузку и улучшить баланс действий между областями подсистем, тем самым сокращая время работы системы. Исследования показали, что обработка заказов является самой дорогостоящей из этих управленческих операций [2].
В целом задачи робота, требующие визуального управления, можно разделить на три типа.
-
1. Визуальное управление по отношению к объекту без какого-либо контакта с ним, например, задачи телеоперации на основе зрения. В этих задачах обратная связь со зрением будет играть основную роль контроля, и в то же время датчик силы может контролироваться в некоторых подпространствах (охраняемое перемещение). Если измеренная сила превысит предельный порог, движение будет немедленно остановлено.
-
2. Визуальное сопровождение объекта при контакте с ним, например, фрезерование, резка, сверление и т.д. В этих задачах предлагаемая система извлечет только характеристики целевого объекта или места, а затем система автоматического принятия решений определит структуру управления в зависимости от этих характеристик.
-
3. Визуальное управление объектом с контактом и захватом его, например, системы сортировки и укладки на поддоны. В этих задачах предлагаемая система будет извлекать характеристики целевого объекта и особенности окружающих объектов, чтобы определить структуру управления и алгоритм захвата.
В продвинутых роботизированных приложениях использования только одного вида обратной связи иногда недостаточно для идеального достижения желаемых целей. Для получения полной информации о рабочей среде предпочтительно использовать различные виды датчиков, такие как датчик зрения, датчик силы, датчик ускорения, тактильный датчик и т.д.
С точки зрения управления, большее количество датчиков означает больше возможностей для структуры системы управления.
В научных работах можно найти целый ряд алгоритмов управления и различных структур для управление роботом. Например, в управлении усилием существует явное и неявное управление усилием, управление импедансом, управление жесткостью и управление допуском и т.д. При использовании большего количества датчиков появится больше подходов, иллюстрацией некоторых подходов к управлению положением / усилием являются гибридное управление положением / усилием и гибридное управление импедансом. Кроме того, можно найти различные подходы, используя датчики силы и зрения вместе, такие как совместное, обменное и гибридное управление.
Способы калибровки роботов и автоматических систем связаны с техническими, экономическими, биологическими или экологическими областями. Практически во всех технических системах используются устройства автоматического управления.
НЕРЕШЕННЫЕ НАУЧНЫЕ ПРОБЛЕМЫ ПО ТЕМЕ ИССЛЕДОВАНИЯ
Актуальной задачей для научного сообщества является совершенствование калибровки автоматизированных систем.
Рассмотрены основные определения, используемые при калибровке кинематических моделей.
Рассмотрены основные современные детерминированные алгоритмы калибровки робототехнических устройств.
Исследован опыт применения нейронных сетей и генетических алгоритмов для калибровки робототехнических устройств, выявлены основные пути возможных дальнейших исследований.
Отдельно исследован вопрос о построении оптимального плана калибровочного эксперимента.
В настоящее время роботы широко используются в промышленности для автоматизации производственных процессов с целью повышения эффективности и производительности. Для крупносерийных производственных процессов типичной стратегией программирования является перемещение робота в нужное положение, которое записывается и затем повторяется. Напротив, такое программирование было бы экономически нецелесообразным для малообъемного производства, поскольку оно обычно отнимает очень много времени. С другой стороны, для преодоления разрыва можно было бы использовать стратегии автономного программирования, но они требуют абсолютной точности робота для выполнения задачи на реальном роботе. В этом случае знание кинематики робота имеет важное значение.
Обычно производители роботов предоставляют номинальную кинематическую модель роботов в виде параметров Денавита–Хартенберга (DH), которая отличается от фактической модели из-за ошибок при изготовлении роботов, сборке и т.д.
Часто номинальные параметры обычно недоступны, поскольку они используются внутри контроллера робота. Все это ограничивает практическое использование роботов во многих малообъемных предприятиях.
Чтобы уменьшить кинематическую погрешность между роботами и, таким образом, обеспечить более широкое практическое использование, в литературе было описано несколько онлайн- и оффлайн-методов, все они направлены на повышение абсолютной точности робота [3]. В общем, мы можем разделить кинематическую калибровку на две группы в зависимости от используемого метода измерения.
Метод разомкнутого контура, при котором измеряется абсолютное положение робота, и метод замкнутого контура, при котором положение робота измеряется относительно системы отсчета [4]. В целом, однако, оба метода требуют эталонной измерительной системы для определения кинематических параметров.
Могут использоваться такие системы, как лазерные трекеры, обычные или оптические координатно-измерительные машины, шаровые стержни и т.д.
Самой дешевой альтернативой является использование замкнутого цикла с использованием точных измерительных приборов, но для этого требуется ручное управление роботом. Следовательно, такой подход трудно автоматизировать, что влияет на общую точность калибровки.
Как видно из таблицы 1, только системы машинного зрения или системы захвата движения (MoCap) могут использоваться, когда робот прикреплен к подвижной базе, поскольку только эти системы могут одновременно измерять положения конечного эффектора и базы робота. В связи с увеличением числа роботов для совместной работы, улучшением доступности и их внедрением в новые области, начиная от производственных линий и заканчивая нашей повседневной средой, повышение абсолютной точности по-прежнему остается проблемой для робототехники.
Недавние исследования по кинематической калибровке включают итеративный процесс оптимизации, основанный на теории наименьших квадратов, для типичных промышленных роботов с 6-кратной производительностью.
Таблица 1. Сравнение различных измерительных систем для кинематической идентификации [5].
|
Devices Features |
Repeatability MC |
Port |
EoU |
Cost |
MoB |
GDP |
|
Theodolite |
5-10 mm Static |
High |
Low |
Medium |
No |
Static |
|
Ultrasonic trilateration |
1 mm Dynamic |
High |
Medium |
Low |
No |
Static |
|
Machine vision |
0.8-1 mm Dynamic |
High |
Medium |
Medium |
Yes |
Dynamic |
|
Laser tracker |
10 дт Dynamic |
High |
Medium |
High |
No |
Static |
|
IR Motion Capture |
0.1 mm Dynamic |
Medium |
Medium |
Medium |
Yes |
Dynamic |
System
В большинстве из этих подходов невозможно измерить основание и конечный эффектор одновременно, что также видно из таблицы 1. В противном случае это было бы возможно с помощью оптической измерительной системы или системы захвата движения.
Однако ни один из этих методов не касается идентификации кинематических параметров для коллаборативных роботов, которые обычно монтируются на подвижной базе.
ПЕРСПЕКТИВНЫЕ ПРЕДЛОЖЕНИЯ ДЛЯ РЕШЕНИЯ ВЫЯВЛЕННЫХ НАУЧНЫХ ПРОБЛЕМ
Поскольку необходимо стремится к автоматической автономной мультисенсорной калибровке, то есть калибровке с использованием датчиков на роботе, включающей множество сенсорных модальностей, таких как зрение и осязание, сосредоточимся на обзоре современного состояния методов калибровки, которые не зависят от внешних метрологических систем. Необходимо уделить особое внимание человекоподобным установкам, которые предлагают богатейшие возможности для автономной калибровки.
Калибровка путем самонаблюдения . Камеры, установленные на роботе, можно использовать для калибровки робота, замкнув цикл калибровки путем самонаблюдения его конечных эффекторов. Для системы стереокамер, наблюдающей за рукой робота. Кинематика манипулятора, а также внешние и внутренние параметры камеры откалиброваны.
Самонаблюдение было применено к роботам-гуманоидам, рассматривающим свои руки с помощью фидуциарных маркеров, используя онлайн-методы для калибровки кинематики, основанные на градиентном спуске Херша и др. и рекурсивная оценка наименьших квадратов Мартинесом-Кантином и др. Иногда можно избежать опознавательных знаков, когда запястье робота, кисть или кончик пальца идентифицируются непосредственно на изображении.
Калибровка с использованием физических ограничений . Следующее семейство подходов использует физические контакты конечного эффектора с окружающей средой, такие как крепление конечного эффектора к земле или использование более сложных установок.
Требуется некоторая форма измерения силы со стороны манипулятора. Кинематическая калибровка с использованием ограничений плоскости (с известными или неизвестными параметрами плоскости) была исследована Икитсом и Холлербахом; они предложили новый подход, фокусирующийся на правильном определении базовых и конечных звеньев и оцениваемый в основном в моделировании. Чжуан и др. исследовали несколько вариантов ограничений плоскости и вариант с известными параметрами плоскости / без них и продемонстрировали их результаты на роботе PUMA 560.
В частности, они показали, что ограничение в одной плоскости не обязательно гарантирует, что все кинематические параметры робота будут наблюдаемыми. С другой стороны, ограничение на несколько плоскостей должно быть решением этой проблемы. Они показывают, что данные, собранные с помощью 3 плоских ограничений, эквивалентны данным, собранным с устройства точечного измерения, при условии, что:
-
(1) все три плоскости взаимно непараллельны;
-
(2) идентификационный якобиан неограниченной системы является неособым;
-
(3) измеренные точки из каждой отдельной плоскости не лежат на прямой в этой плоскости.
Калибровка с помощью самоконтакта (self-touch) . Самоконтакт представляет собой специфический, менее распространенный способ замыкания кинематической петли. Кроме того, необходимо соответствующее сенсорное и моторное оборудование, позволяющее осуществлять этот самоконтакт контролируемым образом. Одна из возможностей заключается в использовании искусственных электронных оболочек, покрывающих определенные области или целые тела роботов.
Для обнаружения контакта может использоваться тактильная матрица. Если доступна точная пространственная калибровка поверхности, то можно измерить дополнительные компоненты конфигурации самоконтакта - где контакт происходит на каждой из двух пересекающихся цепей.
Автономная мультисенсорная калибровка . Существует лишь несколько подходов, которые используют “мультисенсорный” (или “мультимодальный”) ввод для автономной калибровки. Калибровка гуманоидного робота, наблюдая за его запястьем. Датчики объединены путем минимизации единой функции затрат, которая суммирует ошибки, полученные путем сравнения расхождений между моделируемыми проекциями и положением запястья из прямой кинематики.
В значительной степени упомянутые выше типы калибровки, могут быть улучшены за счет:
-
(1) сочетания геометрического и параметрического подходов к кинематической идентификации;
-
(2) улучшения модели ошибок за счет учета влияния ошибок передачи волны деформации и унификации различные источники ошибок;
-
(3) улучшение метода оптимизации.
Подводя итог, можно сказать, что существующие работы по автономной автоматической калибровке, как правило, сосредоточены на одном подходе - полагаясь на самонаблюдение, физические ограничения или самоконтакт.
Наиболее подходящим подходом к оценке параметров DH является использование метода оптимизации. В этом случае осуществляется поиск наилучшей оценки параметров DH, которая минимизирует целевую функцию. Измеряя конфигурации робота, то есть положения суставов q, возможно вычислить позы конечных эффекторов, используя прямую кинематику {Ре,^е }. Различия между измеренными реальными положениями конечных эффекторов {Рм,^м } и рассчитанными представляют собой ошибки модели робота и используются в качестве целевых функций в процессе оптимизации.
Таким образом, мы определяем задачу оптимизации как:
( \ 1 m
DH = агд
(min / ([PECqi, DH) - pM,i]
\ 4—1 i=i
+ И[2 log(5(q i , DH^m;)])
Где µ - коэффициент масштабирования между нормами ошибок положения и ориентации и m - количество измеренных выборок данных. Хорошим выбором для начальных значений параметров являются значения номинальных параметров DH.
Идентификация параметров DH с оптимизацией не зависит от формы траектории, поскольку для этого требуются только одновременные данные о кинематике робота и данные измерения внешнего MoCap для положения конечного эффектора робота. Следовательно, можно применить оптимизацию ко всем трем типам траекторий, C, R и G, соответственно. Это позволяет нам определить, какая траектория лучше подходит для оценки кинематических параметров. Сравнивая все типы используемых траекторий, очевидно, что траектория R охватывает большую часть рабочего пространства робота. Следовательно, он возбуждает самые разные состояния, что можно заметить на рисунке 2. С другой стороны, траектория G является движения, используемого для
представителем типичного шаблона перемещений в п ространстве задач.
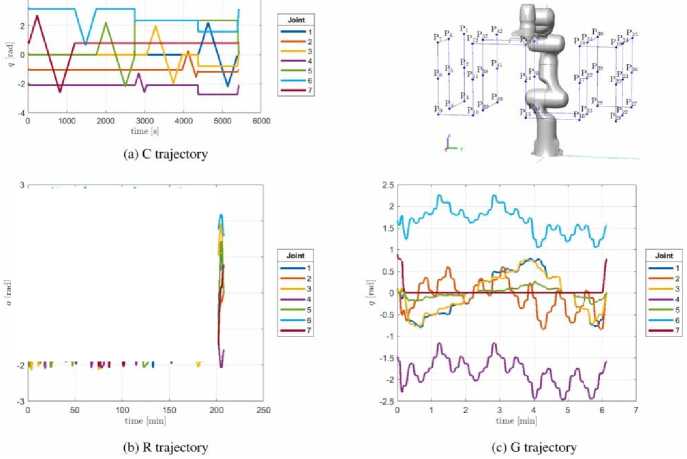
Рисунок 2 - Три схемы движения. (a) совместная траектория, приводящая к круговому движению конечного эффектора робота; (b) совместная траектория через случайные точки и (c) траектория пространства задач через сетку точек. [6]
Определены параметры DH, используя данные измеренной траектории в качестве входных данных для процедуры оценки, описанной выше, с использованием формулы (1).
Для анализа влияния шума измерения использованы 48 измерений для C и 16 измерений для траекторий типа R и G.
Типичное время оптимизации для траектории R с 300 000 точками составило 4 часа на процессоре i7 с 8 ядрами. Выполнена оптимизация для каждого измерения отдельно, и окончательные оценочные значения параметров DH были рассчитаны как среднее значение всех запусков для каждого типа траектории.
Итак, получено три набора параметров DH: DH0C,DH0R,DH0G . Например, параметры, полученные для R траекторий, их стандартное отклонение и максимальное отклонение приведены в таблице 2. Стандартное отклонение ошибки для оцененных параметров DH также находится почти в пределах диапазона точности системы MoCap.
Таблица 2 – Параметры R-траектории [6].
|
Joint |
Mean |
value |
Standard deviation |
Maximal deviation |
||||||||
|
|
ri |
a |
6 |
о |
a |
a |
fl |
<1 |
a |
n |
6 |
|
|
[mm |
[mm] |
[d^] |
[d=g] |
[nim] |
[mm] |
[deg] |
[deg] |
[mm] |
[mm] |
[deg] |
[deg] |
|
|
1 |
-0.3 |
331.6 |
-90.03 |
0.01 |
0.06 |
0.09 |
0.007 |
0.022 |
0.13 |
0.25 |
0.016 |
0.053 |
|
2 |
0.4 |
-0.4 |
90.00 |
-0.40 |
0.03 |
0.04 |
0.003 |
0.005 |
0.06 |
0.11 |
0.008 |
0.012 |
|
3 |
82.6 |
316.7 |
89.95 |
0.31 |
0.03 |
0.08 |
0.004 |
0.012 |
0.05 |
0.14 |
0.008 |
0.025 |
|
4 |
-82.5 |
0.7 |
-90.01 |
-0.23 |
0.03 |
0.09 |
0.006 |
0.003 |
0.07 |
0.19 |
0.012 |
0.009 |
|
5 |
0.1 |
385.2 |
89.65 |
0.73 |
0.05 |
0.07 |
0.004 |
0.006 |
0.11 |
0.15 |
0.007 |
0.010 |
|
6 |
88.1 |
-0.6 |
90.05 |
-0.44 |
0.05 |
0.01 |
0.004 |
0.002 |
0.11 |
0.03 |
0.007 |
0.007 |
|
7 |
0.1 |
106.9 |
-0.05 |
-0.20 |
0.02 |
0.07 |
0.002 |
0.005 |
0.04 |
0.17 |
0.005 |
0.009 |
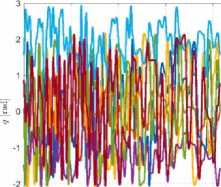
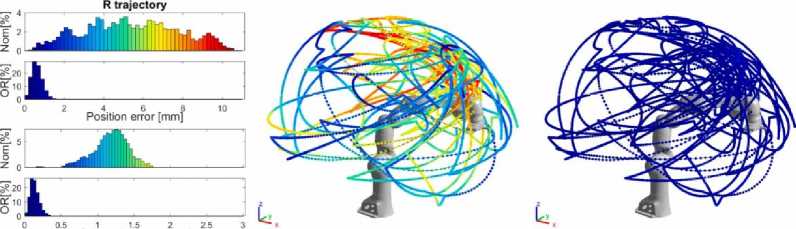
На рисунке 3 показаны ошибки положения и ориентации для одной траектории, полученные с помощью номинальных параметров DH и оцененных параметров DH0R с использованием оптимизации, а также ошибки положения вдоль 3D-траектории. Отражено значительное улучшение ошибок определения положения и ориентации при использовании параметров DH0R .
Orientation error [deg]
Рисунок 3 – Ошибки положения и ориентации для траектории R [6].
Сравнение ошибок положения и ориентации для различных траекторий отражены на рисунке 4.
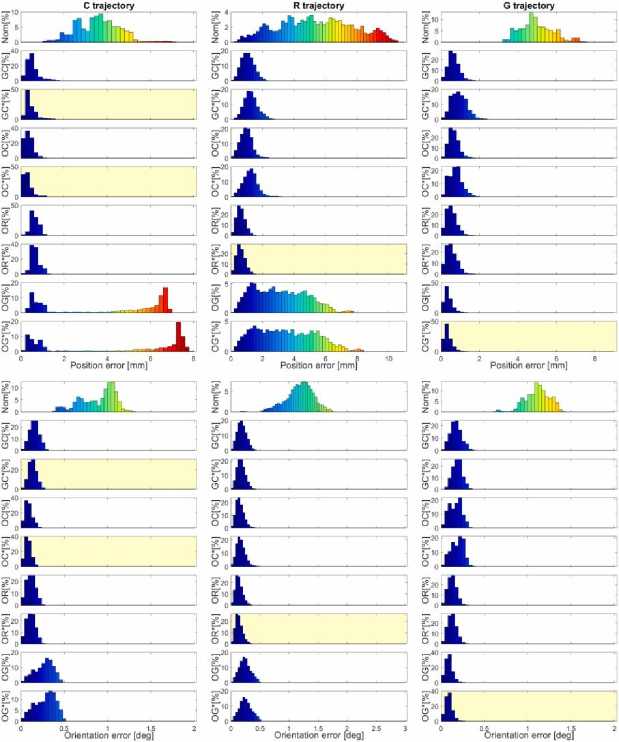
Рисунок 4 - Отклонение расчетных параметров DH от номинальных параметров DH с использованием различных траекторий [6].
Первоначально оценка кинематических параметров выполнялась с использованием типичного геометрического подхода, но дополненного методологией, применимой к роботам, установленным на мобильной базе.
Результаты показывают, что ошибки определения положения и ориентации были значительно уменьшены по сравнению с номинальными параметрами DH.
Очевидно, что результаты, полученные с помощью системы MoCap, немного уступают другим очень дорогим измерительным устройствам, таким как лазерные трекеры.
Тем не менее, это открывает возможность использования общедоступного измерительного устройства, которое также может быть использовано онлайн для других возможных применений в совместной робототехнике.
Обратите внимание, что система MoCap обычно имеет больший рабочий диапазон и может измерять несколько объектов одновременно, что важно при калибровке роботов на мобильной платформе, когда необходимо одновременно измерить начальное положение робота и положение конечного эффектора робота.
Из результатов оценки видно, что подход, предложенный в этой статье, значительно повышает точность коллаборативных роботов на мобильной платформе за счет использования скорректированной (оценочной) кинематической модели робота.
Системы захвата движения широко используются в биомеханике, поэтому пользователи должны учитывать системные ошибки при оценке своих результатов.
Есть несколько направлений для будущей работы. Во-первых, при объединении нескольких подходов к калибровке в единую функцию -ошибки, полученные от различных компонентов, могут быть масштабированы с помощью коэффициентов, обратно пропорциональных их неопределенности. Потребуются дополнительные измерения неопределенности отдельных компонентов и их распространения.
Таким образом, в этой работе все компоненты были оценены одинаково, но это может быть изменено в будущем.
Во-вторых, представленные здесь методы могут быть расширены для использования других существующих датчиков. Можно спроецировать наблюдаемое положение конечного эффектора в координатах изображения (пиксель) в 3D-пространство.
В-третьих, для повторного выполнения онлайн-калибровки количество необходимых поз / точек данных может быть уменьшено с помощью интеллектуального выбора поз.
В-четвертых, стандартный метод калибровки, использующий нелинейную оптимизацию методом наименьших квадратов (алгоритм Левенберга–Марквардта), можно сравнить с подходами фильтрации или с методами, которые делают меньше предположений о доступной исходной модели и внедрить его в интеллектуальный выбор поз для калибровки.
ЗАКЛЮЧЕНИЕ
В этой статье представлены преимущества подхода калибровки с использованием системы MoCap для определения параметров DH робота.
По сравнению с другими подходами калибровки, такими как использование систем на основе лазерного трекера или механических измерительных систем, измерительная система MoCap может одновременно измерять как базовые положения робота, так и положения конечных элементов.
Это позволяет калибровать робота в его рабочей среде, не устанавливая его на специально отведенном для калибровки цоколе. Это также менее затратно и более гибко.
С другой стороны, основным недостатком систем MoCap является то, что точность измерений отличается от точности обычной лазерной системы слежения.
Тем не менее, представленные экспериментальные результаты с определенными параметрами DH показывают значительное улучшение точности определения положения и ориентации.
Такое повышение точности калиброванного робота позволяет легче передавать автономно сгенерированные последовательности движений реальному роботу, особенно когда важна абсолютная точность пространства задач. Также отражено, что при использовании оптимизационного подхода при использовании большего набора данных получаются несколько лучшие результаты, чем при геометрическом подходе.
Наконец, поскольку система MoCap позволяет проводить динамическое одновременное измерение многих точек, калибровку можно выполнять даже тогда, когда положение робота не закреплено.
Список литературы Робототехника и автоматическое управление
- R. Anderson and M. W. Spong, (1988), "Hybrid Impedance Control of Robotic Manipulators", IEEE Journal of Robotics and Automat, 4(5), 549-556.
- ZhiXu, ChuanWang, XinWan, JiaHaiZhan. (2022). Robotics for control strategy optimization and simulation in automatic cigarette sorter.Computers and Electrical Engineering.
- Xuan J.-Q., Xu S.-H. (2014). Review on kinematics calibration technology of serial robots. Journal Precis. Eng. Manuf., 1759-1774.
- Driels, M. R., Pathre, U. S., (1990), "Significance of observation strategy on the design of robot calibration experiments", Journal of Robotic Systemes, 7(2), 197-223.
- Hayat A.A., Boby R.A., Saha S.K. (2019). A geometric approach for kinematic identification of an industrial robot using a monocular camera. Robotics and Computer-Integrated Manufacturing, 329-346.
- Leon Žlajpah, Tadej Petrič. (2022). Kinematic calibration for collaborative robots on a mobile platform using motion capture system. Robotics and Computer-Integrated Manufacturing.
