Робототехника в космосе: история и перспективы развития

Бесплатный доступ
В данной статье на основе материалов из открытых информационных источников дан краткий анализ современного состояния космической робототехники в мире и России. Представлены результаты анализа документов, позволяющих сформулировать цели и задачи деятельности в области космической робототехники. Разработаны предложения по составу средств робототехнического обеспечения перспективной космической инфраструктуры.
Космонавтика, ракетно-космическая техника, космическая робототехника, напланетные роверы.
Короткий адрес: https://sciup.org/148322457
IDR: 148322457 | УДК: 004.3 | DOI: 10.25586/RNU.V9187.21.03.P.040
Robotics in space: history and prospects of development
In this article, based on materials from open information sources, a brief analysis of the current state of space robotics in the world and Russia is given. The article presents the results of the analysis of documents that allow us to formulate the goals and objectives of activities in the field of space robotics. Proposals have been developed for the composition of robotic support tools for promising space infrastructure
Текст научной статьи Робототехника в космосе: история и перспективы развития
Космос – актуальная и перспективная область применения робототехнических систем. Именно в космосе сосредоточена наибольшая концентрация опасных для здоровья человека факторов. Решение задач в условиях космоса невозможно без специального оборудования, обеспечивающего выживание человека.
Космическая робототехника существенно расширяет функциональные возможности беспилотных космических аппаратов, доводя их практически до уровня пилотируемых кораблей. В пилотируемой космонавтике робототехника существенно помогает космонавтам при работах, например, в открытом космосе, а также полностью освободить их от работы в условиях интенсивных ионизирующих излучений.
Применение робототехнических систем позволяет повысить эффективность решения задач на поверхности планет. Космическая робототехника расширяет возможности человечества в изучении и освоении космоса и космических тел.
История развития космической робототехники
На сегодняшний день существуют космические роботы, космические робототехнические комплексы и космические робототехнические системы.
Космическими роботами принято называть технические устройства, которые работают в космическом пространстве за счет автоматического воспроизведения сенсорных, управляющих, двигательных и коммуникационных функций человека.
Робототехника в космосе: история и перспективы развития
Космический робототехнический комплекс – это несколько функционально взаимосвязанных элементов: космический робот, наземные технические средства и сооружения.
Космическая робототехническая система – объединение нескольких космических робототехнических комплексов, способных слаженно взаимодействовать друг с другом для достижения одной цели.
К основным робототехническим системам космического назначения относятся манипуляторы, планетоходы, устройства для работы внутри и снаружи космических кораблей (их обслуживание, регламентные и ремонтные работы) и др.
Космические манипуляторы
Система бортовых манипуляторов «Аист»
Система бортовых манипуляторов (СБМ) «Аист» (рис. 1) предназначена для выполнения операций на орбите с многотонными грузами: выгрузка доставленного груза, стыковка с орбитальной станцией, захват свободно летящего в космосе объекта и его погрузка с последующим возвращением на Землю [3]. СБМ была разработана в ЦНИИ робототехники и технической кибернетики (г. Санкт-Петербург) для использования на МТКК «Буран».

Рис. 1. Система бортовых манипуляторов «Аист»
В состав СБМ входят два манипулятора, представляющие собой многозвенные механизмы с электромеханическими приводами, система управления с бортовой ЭВМ и программным управлением, подсистемы телевидения, освещения, телеметрии и другие, обеспечивающие контроль работы системы. В условиях реального космического полета СБМ «Аист» не использовалась.
Бортовые манипуляторы «Канадарм» и «Канадарм-2»
Бортовой манипулятор « Канадарм» (Canadarm) кораблей многоразового использования системы «Спейс Шаттл» предназначен для выполнения операций на орбите: выгрузка доставленного груза, размещение доставленных с Земли объектов на околоземной орбите или помещение их в состав орбитальной станции, захват свободно летящего в космосе объекта и его погрузка с последующим возвращением на Землю, а также перемещение астронавтов в открытом космосе. Разработан специалистами канадской компании MacDonald Dettwiler and Associates (MDA) по заказу NАSА [17; 23].
Информационные технологии и оптимизация управления
Манипулятор представляет собой многозвенный механизм с электромеханическим приводом, способен захватить свободно летящий объект, разместить и зафиксировать его в грузовом отсеке. Длина манипулятора «Канадарм» составляет около 15 м, диаметр звеньев – более 30 см, масса манипулятора – чуть больше 400 кг. Всего было изготовлено 5 манипуляторов.
Впервые «Канадарм» был успешно испытан в космосе в ходе второй миссии Space Shuttle в ноябре 1981 г. Последний полет состоялся в июле 2011 г. Таким образом, манипулятор успешно эксплуатировался в течение 30 лет.

Рис. 2. Бортовой манипулятор « Канадарм»
Эволюционным развитием манипулятора « Канадарм» является манипулятор «Ка-надарм-2» (SSRMS – Space Station Remote Manipulator System), также разработанный в Канаде. В отличие от манипулятора «Канадарм», возвращаемого на Землю по окончании каждой из миссий шаттла, предназначен для постоянного функционирования в космосе и допускает возможность ремонта на орбите.
Длина манипулятора составляет около 17,6 м, масса – более тонны. Предназначен для манипулирования грузами массой более 100 т.
Манипулятор «Канадарм-2» рассчитан на постоянное пребывание в космосе в течение не менее 15 лет и с 2001 г. успешно эксплуатируется на МКС, являясь основным элементом мобильной системы обслуживания MSS (Mobile Servicing System). Манипулятор эксплуатируется в настоящее время.
Робот-манипулятор ERA (European Robotic Arm)
Робот-манипулятор ERA (European Robotic Arm) предназначен для проведения операций по сборке, монтажу и перемещению грузов на борту космических кораблей и орбитальных станций, а также проведения инспекции внешней поверхности космических аппаратов [10].
Одним из его преимуществ по сравнению с другими аналогичными системами является возможность работать с панелями солнечных батарей. Робот создан консорциумом из 22 компаний под руководством германской компании Dutch Space.
Состоит из двух одинаковых 5-метровых штанг, соединенных шарниром. На концах этих штанг находятся одинаковые крепежные системы, поэтому робот может прикрепляться к станции любым концом и перемещаться по ее поверхности, подобно пауку.
Робототехника в космосе: история и перспективы развития
Оснащен подсистемами телевидения, освещения, телеметрии и другими, обеспечивающими контроль работы робота. Предполагается доставка и эксплуатация робота-манипулятора ERA на борт МКС.
Шагающий адаптивный робот «Циркуль»
Шагающий адаптивный робот «Циркуль» предназначен для выполнения инспекций и других манипуляционных операций в труднодоступных технологических зонах: обслуживание и сборка космических станций, осмотр и ремонт трубопроводов и другого оборудования. Разработан в ЦНИИ робототехники и технической кибернетики (г. Санкт-Петербург). Перемещение осуществляется путем шагания и манипулирования объектами.
Преимущества по сравнению с другими аналогичными устройствами: модульное построение, иерархическая структура системы управления, открытая структура программного обеспечения, оперативное планирование выполнения полетных операций.
Планетоходы
Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях, – напланетные мобильные роботы (роверы), планетоходы (луноходы, марсоходы). Такой робот может передвигаться по поверхности другой планеты, неся на борту научные приборы. Как правило, и сам ровер, и научное оборудование на нем функционируют в автоматическом режиме.
В период с 1970 г. до настоящего времени на поверхность Луны и Марса были доставлены и функционировали там следующие планетоходы [15; 16].
«Луноход-1», «Луноход-2»
«Луноход-1» (1970 г.) и «Луноход-2» (1973 г.) – автоматизированные комплексы, созданные специалистами НПО им. С. А. Лавочкина. Успешно функционировали в течение нескольких месяцев на поверхности Луны, доказав возможность создания подобных образцов техники.
«Луноход-1» (рис. 3) – первый в мире самоходный аппарат, успешно работавший на Луне. На поверхность Луны был доставлен 17 ноября 1970 г. советской межпланетной станцией «Луна-17» для изучения лунного грунта, а также радиоактивного и рентгеновского излучений.

Рис. 3. Самоходный аппарат «Луноход-1»
У каждого из его восьми колес был свой электродвигатель и свой тормоз, благодаря чему этот робот мог объезжать глубокие кратеры и небольшие скалы. В качестве приво-
Информационные технологии и оптимизация управления дов использовали электродвигатели, которые запитывались от солнечной батареи, установленной на крышке приборного отсека. Мощность батареи – 180 ватт. Также в систему энергопитания входили химические буферные батареи. Луноход был оборудован двумя телекамерами, в которых было применено малокадровое телевидение с частотой смены картинки от 1 кадра в 4 секунды до 1 кадра в 20 секунд. Масса – 756 килограмм.
«Луноход-1» проработал в 3 раза дольше запланированного срока, успев проехать 10540 м, передав на Землю 211 панорам и около 25000 фотографий. После 301-го дня работы он не вышел на связь с Землей в связи с выработкой изотопного источника теплоты, поддерживающего тепло внутри лунохода.
«Луноход-2» – второй в мире дистанционно управляемый самоходный аппарат. Он был разработан для фотосъемки и видеосъемки Луны, проведения экспериментов с наземным лазерным дальномером и прочих операций. На поверхность Луны был доставлен станцией «Луна-21» 15 января 1973 г. Технические характеристики были примерно такие же, как и у «Лунохода-1». Однако главным его отличием являлось наличие третьей телекамеры, установленной на уровне человеческих глаз, что позволяло смотреть намного дальше.
Марсоходы «Спирит» и «Оппортунити»
Марсоходы «Спирит» (Spirit) (рис. 4) и «Оппортунити» (Opportunity) разработаны и изготовлены кооперацией предприятий США по заказу NАSА и успешно запущенные на Марс в 2004 г. Отправлены они были туда для одной цели – установить, была ли когда-нибудь на Марсе вода [14].
На марсоходах этого типа установлено 6 колес, каждое из которых имеет свой собственный электродвигатель. Телекамеры отдалены друг от друга примерно на расстояние глаз человека. С помощью научного оборудования он берет образцы грунта, анализирует их и отправляет данные ученым.
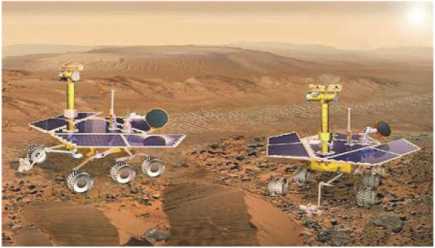
Рис. 4. Марсоход «Спирит»
Также в них были установлены электронагреватели, которые поддерживали температуру, необходимую для работы робота. Всей этой аппаратурой управлял бортовой компьютер. Питалась вся электроника от солнечной батареи. Она же заряжала литиевоионный аккумулятор, энергия с которого использовалась в ночное время. Изначально рассчитывалось, что эти марсоходы проработают около 90 дней, и их миссия завершится, но проработали они гораздо больше. «Спирит» проработал больше шести лет, после чего связь с ним была утеряна. Марсоход «Оппортьюнити» до сих пор стабильно работает [11].
Робототехника в космосе: история и перспективы развития
Марсоход «Кьюриосити»
«Кьюриосити» (Curiosity) – марсоход нового поколения, который по размерам в несколько раз больше и тяжелее аппаратов-близнецов «Спирит» и «Оппортьюнити». После восьми месяцев путешествия совершил посадку в районе марсианского кратера Гейл. Масса марсохода – 185 кг. Оборудован двумя телекамерами, микроскопом, манипулятором, навигационной системой и антенной для передачи данных на Землю. Перед марсоходом стоит цель сбора проб почвы и атмосферы Марса, а также подготовка к высадке человека на Марс.
Марсоход «Чжужун»
15 мая 2021 г. посадочный модуль китайской автоматической межпланетной станции «Тяньвэнь-1» с входящим в ее состав марсоходом «Чжужун» совершил успешную посадку в южной части равнины Утопия в северном полушарии Марса.
11 июня марсоход (рис. 5) прислал «селфи» и панорамное фото равнины Утопия с места приземления и другие снимки поверхности. Период работы марсохода на поверхности планеты составит 92 земных дня. К настоящему времени марсоход проработал 28 марсианских дней (один земной день и 37 минут).
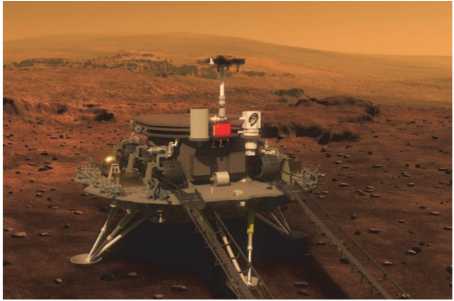
Рис. 5. Марсоход «Чжужун»
Космический робот-телескоп «Хаббл»
Космический телескоп «Хаббл» (Hubble Space Telescope, HST), разработанный США при участии Европы, – это целая космическая обсерватория с большим количеством аппаратуры, позволяющей получать снимки отдаленных уголков Вселенной в разных диапазонах длин волн. Станция названа в честь известного астронома Эдвина Хаббла [16].
Орбитальный телескоп «Хаббл» был запущен в 1990 г., но к полноценной работе смог приступить только спустя 3 года из-за обнаруженной ошибки. Чтобы исправить дефект, была создана система COSTAR, которую установили на аппарат в 1993 г. В 2009 г. система была спущена на Землю и выставлена в Национальном музее авиации и астронавтики США. Миссию телескопа продляли несколько раз. В 2021 г. планируется снять его с орбиты.
Перспективные разработки космической робототехники. Роботы-аватары
Роботы-аватары – это роботы, полностью копирующие людей, способные в точности повторять движения головы, ног, рук и даже пальцев от человека, находящегося в специальном костюме. Единственный минус – задержка в сигнале, посылаемом от костюма к роботу и от видеокамеры робота на Землю, которая довольно велика. В связи с этим в
Информационные технологии и оптимизация управления ближайшее время их можно будет использовать только вблизи Земли, например, на Луне или на космических станциях [12].
Космические роботы FEDOR и ARTEM
Космический робот «Федор» (Final Experimental Demonstration Object Research – FEDOR) – антропоморфный робот-спасатель. Его создание началось в 2014 г. НПО «Андроидная техника» и Фондом перспективных исследований. «Федор» имеет систему голосового управления и специальные датчики. У него есть голова, пара ног и рук с пятью пальцами. Рост машины – более 180 см, а вес – до 160 кг.
Антропоморфный робот способен заменять человека в сложных и опасных космических ситуациях. Робот уже побывал на Международной космической станции (МКС), где участвовал в ряде экспериментов по программе «Испытатель».
Космический робот следующего поколения получил имя ARTEM (Automatic Research and Testing Machine). В отличие от своего предшественника частично умеет управлять многоразовым космическим кораблем «Орел», испытания робота начнутся уже в 2023 г.
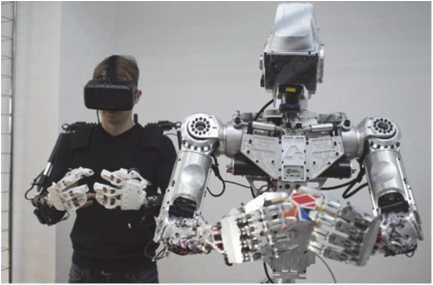
Рис. 6. Антропоморфный робот ARTEM
Телеуправляемый андроид SAR-401
Опытный образец робота SAR-401 был разработан в 2013 г. в НПО «Андроидная техника» (г. Москва). Принцип управления – повтор андроидом движений человека-оператора, одетого в специальный костюм (задающее устройство копирующего типа УКТ-3). Оператор может находиться, например, на борту космической станции или корабля, а робот будет осуществлять необходимые манипуляции снаружи корабля. На текущий момент андроид позволяет с его помощью проводить порядка 50 различных видов действий в открытом космосе.
Для SAR-401 разработаны два варианта захватывающих устройств [21].
Первый антропоморфный захват необходим для выполнения рабочих задач с предельными характеристиками и предназначен для удержания, манипуляций и перемещения объектов различной массы.
Второй захват предназначен для выполнения работ, требующих мелкой и точной моторики, и имеет 13 степеней подвижности.
Взаимодействие оператора с СРТС SAR-401 осуществляется системой дистанционного управления копирующего типа. Также предусмотрен супервизорный и автономный режимы управления.
Робототехника в космосе: история и перспективы развития

Рис. 7. Телеуправляемый андроид SAR-401
«Робонавт» – человекоподобный робот
«Робонавт» (англ. Robonaut) – человекоподобный робот-кентавр, разработанный NASA и General Motors для работы в открытом космосе (рис. 8).

Рис. 8. Робот-кентавр «Робонавт»
Механизированный торс, передвигающийся на четырехколесной тележке, предназначен для оказания помощи астронавтам при работе в открытом космосе в экстремальных ситуациях, когда астронавт не может выполнить те или иные операции в силу физиологических ограничений человеческого организма. Может перемещать грузы значительной массы с ювелирной точностью [12; 19].
NASA с 1997 г. работал над созданием и модификацией человекоподобного робота. В 2006 г. проект вышел на новый этап, и через четыре года был представлен «Робонавт-2» – более умелый, бесшумный, ловкий и компактный, а также в четыре раза более быстрый, чем его предшественник. Он оснащен 350 датчиками и 38 процессорами. Робот переправлялся на МКС по частям, получив пару механических ног лишь в прошлом году. После этого устройство, достигающее в высоту 2,4 м, смогло передвигаться внутри орбитального комплекса под управлением операторов с Земли или кого-либо из членов экипажа.
«Персональный помощник астронавта»
«Персональный помощник астронавта» (Personal Satellite Assistant, PSA) – малоразмерное устройство (рис. 9), способное перемещаться во внутренних объемах кораблей и станций за счет миниатюрных реактивных двигателей. Предназначено для информаци-
Информационные технологии и оптимизация управления онной поддержки астронавтов при их работе с бортовым оборудованием. Разработка ведется специалистами Исследовательского центра NASA им. Эймса. Устройство оснащено датчиками атмосферы, измеряющими почти все ее параметры. Может служить средством непосредственной связи астронавтов и наземных центров управления полетом. Может работать автономно и по командам с Земли [22].

Рис. 9. Персональный помощник астронавта
Основные направления перспективного развития космической робототехники в ближайшие годы
Основные направления развития робототехнических систем космического назначения на ближайшую перспективу – решение функциональных, технологических, сервисных и организационных задач, возникающих в ходе космических полетов, по результатам которых олжны быть сформулированы технические требования к перспективным робототехническим системам космического назначения [2; 4; 23].
В ряду перспективных направлений, подлежащих автоматизации робототехническими средствами, следует выделить следующие [20].
Орбитальный монтаж и сервисное обслуживание космических объектов , объединяющие задачи транспортировки к месту сборки фрагментов монтируемых конструкций, автоматизацию собственно сборочных операций и инспекции технического состояния обслуживаемых космических объектов, перемещения КА в пределах орбиты и между орбитами, а также очистка околоземного космического пространства от техногенного мусора.
Работа с малыми небесными телами. Предполагает либо изменение их траектории движения с целью предотвращения столкновения с нашей планетой, либо перенаправление на удобную стабильную орбиту для дальнейших исследований, а также посадку на поверхность объекта для отбора фрагментов и доставки их в исследовательскую лабораторию.
В качестве иллюстрации можно привести исследовательский проект американской компании SpaceWorks Engineering, относящийся к проблеме астероидной опасности [1]: «рой» роботов подлетает к опасному для Земли астероиду, садится на него, «всверлива-ется» в поверхность и начинает периодически толкать астероид, сдвигая его с опасной для нашей планеты траектории.
Изменение орбиты КА. Интересным проектом в данной области является разработанный в 2014 г. фирмой ViviSat, США, механизированный комплекс Mission Extension Vehicle (MEV), предназначенный для продления срока эксплуатации уже находящегося на орбите оборудования [11; 12]. MEV способен пристыковываться к другим спутникам
Робототехника в космосе: история и перспективы развития и с помощью своей двигательной установки переконфигурировать высоту их орбиты или перевести КА на другую орбиту.
Дозаправка спутников. В 2014 г. в Годдардовском центре и в Космическом центре им. Кеннеди испытывались три основных узла роботизированной системы PROxiTT [13; 14], предназначенной для автоматической дозаправки спутников на орбите: система перекачки топлива, гибкий топливный шланг и система подачи окислителя.
Новым направлением является использование ядерных энергоустановок на отечественных космических кораблях, что, разумеется, невозможно без применения робототехники [8].
Стремление к расширению возможностей робототехнической космической системы ведет к ее усложнению и удорожанию. Могут быть названы следующие тенденции развития средств космической робототехники.
Совершенствование отработанных прототипов роботов в направлении расширения функциональных возможностей без принципиальных изменений конструкции. Примером может служить разработка манипулятора Canadarm-2 на базе манипулятора Canadarm [17].
Дальнейшее развитие «антропоморфного подхода» , предполагающего увеличение кинематического подобия робототехнических средств организму человека для обеспечения сходной функциональности и облегчения воспроизведения роботом физиологически естественных для человека движений (Robonaut). Сегодня отрабатываются различные конструкции робота – помощника космонавта, а завтра встанет вопрос о создании его дублера и превращении обитаемых космических аппаратов в посещаемые [7].
Унификация общих функциональных компонентов робототехники обеспечивает предельное повышение их технического уровня, сокращение сроков проектирования и облегчение технического обслуживания.
Оптимальное сочетание средств робототехники и человека при выполнении конкретных операций. Речь идет о специфическом для космонавтики оптимальном взаимодействии космонавта и техники. Для пилотируемых аппаратов необходимо обеспечить оптимальное распределение подлежащих выполнению операций между космонавтом и робототехникой, включая возможность совместной работы [12]. Однако эти процессы должны находиться под оперативным контролем человека с возможностью их блокировки при возникновении каких-либо нештатных ситуаций.
Современный этап развития систем автоматического управления – это освоение методов искусственного интеллекта. Это означает создание нового поколения роботов – интеллектуальных. Аналогично быстро прогрессируют напланетные мобильные роботы (роверы), создаются первые маневрирующие свободно летающие орбитальные роботы.
Важной задачей для дальнейшего развития космической робототехники является формирование на основе обобщения имеющегося опыта создания и применения средств робототехники в космосе с учетом перспектив дальнейшего развития уже достаточно определившихся научно-технических принципов, которыми следует руководствоваться при создании этой техники и ее развитии.
Выводы
На основании обзора современного состояния и анализа тенденций развития объектов перспективной космической инфраструктуры может быть сделан вывод о потенциальном конструктивном многообразии перспективных робототехнических систем космического назначения, определяемом сложностью и разнородностью задач, требующих автоматизации.
Информационные технологии и оптимизация управления
Дальнейшее развитие средств робототехники видится целесообразным в направлении совершенствования отработанных прототипов, например, отработка в режиме телеуправления и автоматическом режиме операций, освоенных в режиме полуавтоматического управления человеком-оператором, находящимся на борту.
Весьма перспективным можно считать класс монтажно-сервисных автономных роботизированных космических модулей, важной особенностью которых является многообразие возможных режимов функционирования.
Целесообразным может быть использование совокупности монтажно-сервисных автономных роботизированных космических модулей, каждый из которых обладает разумной степенью универсальности, но ориентирован на предпочтительное использование в одном из возможных режимов функционирования.
Список литературы Робототехника в космосе: история и перспективы развития
- Армия сумасшедших роботов может защитить Землю от астероидов [Электронный ресурс]. – URL: http://www.membrana.ru/particle/355
- Белоножко П.П. Космическая робототехника. Современное состояние, перспективные задачи, тенденции развития. Аналитический обзор // Наука и образование. МГТУ им. Н.Э. Баумана. 2016. № 12.
- Буран. Cистема бортовых манипуляторов «Аист» [Электронный ресурс]. – URL: http://buran.ru/htm/bighand.htm
- Виноградов П.В., Железняков А.Б., Спасский Б.А. Актуальные направления развития космической робототехники // Робототехника и техническая кибернетика. 2015. № 4 (9). С. 3–12.
- Даляев И.Ю. Многофункциональная робототехническая система для работы на внешней поверхности космических летательных аппаратов. СПб., 2014.
- Интеллектуальные роботы / под ред. Е.И. Юревича. М.: Машиностоение, 2007.
- Круглый астронавт стремится на космическую станцию [Электронный ресурс]. – URL: https://mipt.ru/drec/news/droid.
- Лопота В.А. О системном подходе к развитию экстремальной робототехники / В.А. Лопота, В.И. Юдин, Е.И. Юревич // Актуальные проблемы защиты и безопасности. 2005. Т. 5.
- Лосев А. Бизнес рвется в космос // Российская Бизнес-газета. № 1016 (37) [Электронный ресурс]. – URL: http://rg.ru/2015/09/22/kosmos.html
- Наука и промышленность: Космическая робототехника [Электронный ресурс]. – URL: http://old.ci.ru/inform06_08/p_06.htm
- Наука и техника [Электронный ресурс]. – URL: https://lenta.ru/news/2017/01/14/sprut
- Орбитальные роботы-ремонтники посодействуют продлить актуальный цикл спутников [Электронный ресурс]. – URL: http://www.wht.by/space/3614-orbitalnye-robotyremontniki-posodejstvuyut-prodlit-aktualnyj-tsikl-sputnikov
- Основные виды роботов в Мире [Электронный ресурс]. – URL: https://robroy.ru/roboti
- Роботы в Космосе [Электронный ресурс]. – URL: http://roboty6.narod.ru/space.htm
- Роботы для освоения космоса [Электронный ресурс]. – URL: https://ru.wikiversity.org/wiki
- Роботы стремятся к звездам [Электронный ресурс]. – URL: https://habr.com/ru/company/mailru/blog/407165
- Роботы-манипуляторы заработают в космосе по-новому [Электронный ресурс]. – URL: http://roboting.ru/1526-roboty-manipulyatory-zarabotayut-v-kosmose-po-novomu.html
- Роботы-пауки построят космические аппараты на орбите [Электронный ресурс]. – URL: http://www.popmech.ru/technologies/14650-roboty-pauki-postroyat-kosmicheskieapparaty-na-orbite
- Сборка в космосе [Электронный ресурс]. – URL: http://www.assemblingonspace.ru
- Тенденции развития космонавтики в мире [Электронный ресурс]. – URL: http:// www.sovkos.ru/cosmos/information/index.html
- Технология, наука, космос, изобретения [Электронный ресурс]. – URL: http://www.fainaidea.com/technologii/sar-401-pervyj-rossijskij-robot-astronavt-36383.html
- Царь-град [Электронный ресурс]. – URL: http://tsargrad.tv/news/2016/11/11/vrssii-sozdajut-kosmorobota-pomoshhnika-astronavtam-na-mks
- Шиманчук Д.В. Введение в современную робототехнику / СПбГУ, 2018.
