Российские системы стыковки для сборки и обслуживания международной космической станции

Автор: Яскевич А.В., Павлов В.Н.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Проектирование, конструкция, производство, испытания и эксплуатация летательных аппаратов
Статья в выпуске: 4 (47), 2024 года.
Бесплатный доступ
В статье рассматриваются российские системы стыковки, которые применялись для сборки и обслуживания Международной космической станции (МКС). Эти системы реализуют практически одинаковый простой цикловый способ управления для двух различных типов стыковочных агрегатов: «штырь-конус» (для осесимметричных кораблей и модулей массой до 25 т) и «периферийный» (для многоразовых космических кораблей массой до 110 т). Кратко описываются конструкции таких агрегатов, разработанных ещё до начала проекта МКС, а также их модификации, обусловленные некоторыми ограничениями станции. Периферийные агрегаты обеспечили стыковки кораблей типа Space Shuttle, доставлявших на орбиту модули и другие компоненты конструкции американского сегмента станции. Агрегаты типа «штырь-конус» соединили все модули российского сегмента. Они обеспечили необходимые для обслуживания МКС стыковки российских пилотируемых и грузовых кораблей, а также европейских грузовых кораблей ATV.
Международная космическая станция, космический корабль, система стыковки, агрегат стыковки
Короткий адрес: https://sciup.org/143183986
IDR: 143183986 | УДК: 629.78.027.7+629.786.2
Russian docking systems for international space station assembly and support
The paper deals with the Russian docking systems that were used for assembly and support of operation of the International Space Station (ISS). The systems implement a virtually identical simple cyclic control method for two different types of docking units: “probe-cone” (for axially symmetrical vehicles and modules with a mass of up to 25 tons) and “peripheral” (for reusable spacecraft with a mass of up to 110 tons). The paper provides a brief description of such docking units that were originally developed before the ISS project started, as well as their variants redesigned to meet certain constraints imposed by the station. Peripheral units supported dockings with such spacecraft as Space Shuttle, which delivered to orbit modules and other components of the US orbital segment. “Probe-cone” type units linked up all the modules of the Russian segment. They made possible dockings of Russian manned and cargo spacecraft, as well as the European ATV cargo vehicle, that are indispensible for ISS support.
Текст научной статьи Российские системы стыковки для сборки и обслуживания международной космической станции
Стыковка космических аппаратов (КА) является способом их соединения на орбите. Один из КА является активным, выполняет сближение, второй — пассивный — поддерживает свою ориентацию. Стыковка представляет собой управляемый механический процесс, который выполняется с использованием системы стыковки, включающей в себя активный и пассивный стыковочные агрегаты (СтА) и их блоки управления. Она начинается после завершения сближения и состоит из следующих этапов:
-
• достижение сцепки, т. е. первичной механической связи СтА;
-
• поглощение энергии сближения;
-
• выравнивание и стягивание;
-
• образование жёсткого и герметичного соединения с обеспечением транзитных электрических и гидравлических связей, прохода экипажа и переноса грузов.
Оба агрегата имеют направляющие элементы, контактное взаимодействие которых способствует их выравниванию и сцепке. Активный агрегат, как правило, устанавливается на активном корабле и имеет три типа механизмов. Наиболее сложным является пространственный стыковочный механизм (СтМ), который имеет до шести степеней свободы. Он перемещает расположенные на нём плоские механизмы защёлок (МЗ) для достижения сцепки, поглощает энергию сближения кораблей, выравнивает и стягивает агрегаты до положения, в котором начинает работать механизм герметизации стыка (МГС). Последний имеет в своём составе равномерно распределённые по периметру корпуса активные и пассивные крюки, зацепление и стягивание которых обеспечивает жёсткое и герметичное соединение СтА. Пассивный агрегат имеет механические упоры для зацепления защёлок и при необходимости — собственный МГС.
Технология стыковки является ключевой при создании и обслуживании орбитальных станций. В данной работе коротко рассматривается её развитие в течение более 30 лет, предшествующих началу сборки Международной космической станции (МКС), и те модификации СтА и управления ими, которые были обусловлены уникальными геометрическими и инерционными характеристиками стыкуемых объектов — их относительно большими массами, моментами инерции и значительным удалением центров масс от оси стыковки.
Системы стыковки КА — первые 25 лет развития
Первыми в мире 16 марта 1966 г. стыковались американские пилотируемый космический корабль (КК) Gemini-8 и ракетная ступень Agena , выполнявшая роль пассивного объекта [1, 2]. Активный агрегат был установлен на Agena и имел направляющий элемент в виде подвижного приёмного усечённого конуса, закреплённого на пружинно-гидравлических амортизаторах, и достаточно сложные механизмы защёлок. КК Gemini-8 имел только направляющий элемент — переднюю коническую часть с упорами для защёлок. Сближение КК осуществлялось в ручном режиме, а его механическое негерметичное соединение с активным СтА — в автоматическом: при наличии сигналов о срабатывании всех трёх защёлок выдавалась команда на включение электропривода стягивания. Расстыковка выполнялась в полуавтоматическом режиме, соответствующая команда передавалась по командной радиолинии от КК Gemini-8 к Agena , что значительно усложняло управление. Проектный анализ, проведённый позднее по программе Apollo , выявил также, что компоновочные и массовые характеристики данной схемы стыковки хуже, чем у СтА типа «штырь–конус», которому впоследствии было отдано предпочтение.
Первая полностью автоматическая стыковка была выполнена в СССР 30 октября 1967 г. [2, 3]. Активный СтА с СтМ типа «штырь» и пассивный СтА с приёмным конусом были установлены на активном КА «Космос-188» и на пассивном КА «Космос-186» соответственно.
Принципиально новыми элементами в конструкции СтМ и агрегатов являлись: поступательно перемещающийся штырь в виде винта; шариковинтовая передача (ШВП), преобразующая поступательное движение во вращательное; малогабаритные вращательные магнитные тормоза (МТ) для демпфирования; электропривод втягивания и выдвижения штыря (с помощью дополнительного винта);
выдвигающиеся рычаги выравнивания; фигурные пазы в гнезде приёмного конуса; автоматический цикловый режим управления. Энергию сближения накапливали поступательные пружины в осевом демпфере. Благодаря исполь- зованию электромеханики стыковка и расстыковка могли выполняться многократно. Эта система использовалась на пилотируемых КК «Союз-1» – «Союз-9». С помощью этих СтА в январе 1969 г. была выполнена стыковка пилотируемых кораблей «Союз-4» и «Союз-5». После стыковки космонавты Алексей Елисеев и Евгений Хрунов перешли из корабля «Союз-5» в корабль «Союз-4» через открытый космос, так как первые КК «Союз» не имели герметичных переходных тоннелей.
На первых орбитальных станциях (ОС) «Салют» был предусмотрен один стыковочный порт, а начиная со станции «Салют-6» — два стыковоч- ных порта: один для пилотируемых КК «Союз», второй — для КК «Про- гресс», доставляющих грузы и топливо. Необходимость посещения и обслуживания ОС привела к разработке значительно более совершенной сис- темы стыковки ходом (ССВП). были внесены
с внутренним пере-В конструкцию СтА следующие основные изменения. Корпусы обоих агрегатов имеют переходные тоннели с поворотными крышками и средствами про- верки герметичности соединения. На крышке активного агрегата установлен СтМ типа «штырь», а на крышке пассивного — направляющий элемент в виде приёмного конуса с гнездом. Для уменьшения габаритов СтА угол образующей приёмного конуса увеличен.
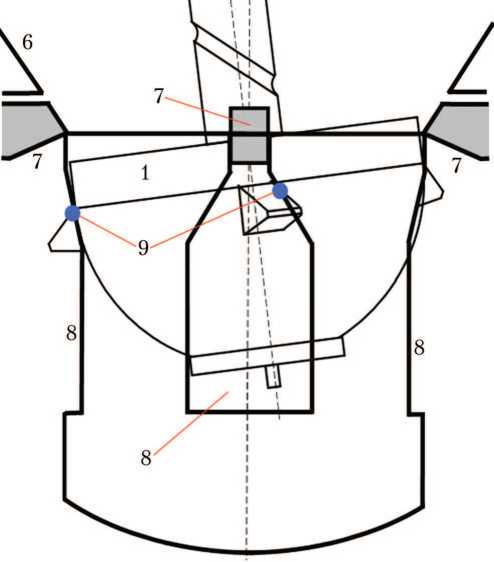
Как и в первом СтМ для стыковки КК «Союз», штырь заканчивается направляющим элементом — головкой, но с новой геометрией (рис. 1).
В ней находятся защёлки, датчик касания 1 (ДК1), датчик касания 2 (ДК2), датчик захвата головки (ДЗГ). Гнездо приёмного конуса пассивного агрегата имеет четыре фигурных паза. В них попадают защёлки головки штыря после их временного обжатия упорами и цилиндрическими стенками гнезда. Это обозначается термином «сцепка». Вместо поступательных защёлок используются поворотные, которые выдвигаются в исходное положение перед стыковкой и убираются с помощью отдельного привода защёлок. Это практически устраняет трение при сцепке и расцеплении. Форма пазов при контакте с ними защёлок в процессе стягивания обеспечивает выравнивание СтА при угловых рассогласованиях относительно их продольных осей. Два ДЗГ после сцепки попадают между пазами и постоянно обжимаются стенками гнезда. Невозможность убрать защёлки из-за отказа привода защёлок парируется складыванием поворотных упоров гнезда пассивного СтА с помощью их привода.
СтМ установлен на поворотной крышке переходного люка, изменена его кинематика (рис. 2). В осевом демпфере поступательные устройства заменены на вращательные — пружинный механизм (ПМ) и фрикционный тормоз (ФрТ), исключён дополнительный винт. Штырь, осевой демпфер и привод размещены в подвижном корпусе, качающемся в универсальном шарнире относительно основания СтМ. Демпфирование угловых движений этого корпуса осуществляется двумя боковыми поступательными ПМ и двумя вращательными МТ. Снаружи подвижного корпуса установлены силовые накладки, которые при контакте с приёмным конусом должны ограничивать угловые перемещения СтА и, соответственно, КА. Четыре выдвигающихся рычага с роликами выравнивания заменены на три более прочных. Траектория их движения определяется формой кулачка, угол поворота которого связан с вращением ШВП и, соответственно, с длиной свободной части штыря. Контакты роликов рычагов с поверхностью приёмного конуса при стягивании (уменьшении длины штыря) обеспечивают выравнивание продольных осей агрегатов. Перед началом

а)
б)
Рис. 1. Датчики и защёлки головки штыря: а — при втянутом штыре; б — после сцепки в гнезде приёмного конуса; 1 — корпус головки; 2 — ДК1; 3 — ДК2;
4 — защёлки в убранном положении; 5 — ДЗГ; 6 — приёмный конус; 7 — упоры пазов гнезда; 8 — пазы гнезда; 9 — контакты открытых защёлок и пазов (фотография и рисунок созданы авторами)
жёсткого соединения СтА рычаги возвращаются в подвижный корпус. Длина штыря и углы поворота подвижного корпуса фиксируются датчиками и передаются по телеметрии. Привод защёлок установлен на подвижном корпусе СтМ и передаёт движение защёлкам с помощью вала, находящегося внутри полого штыря.
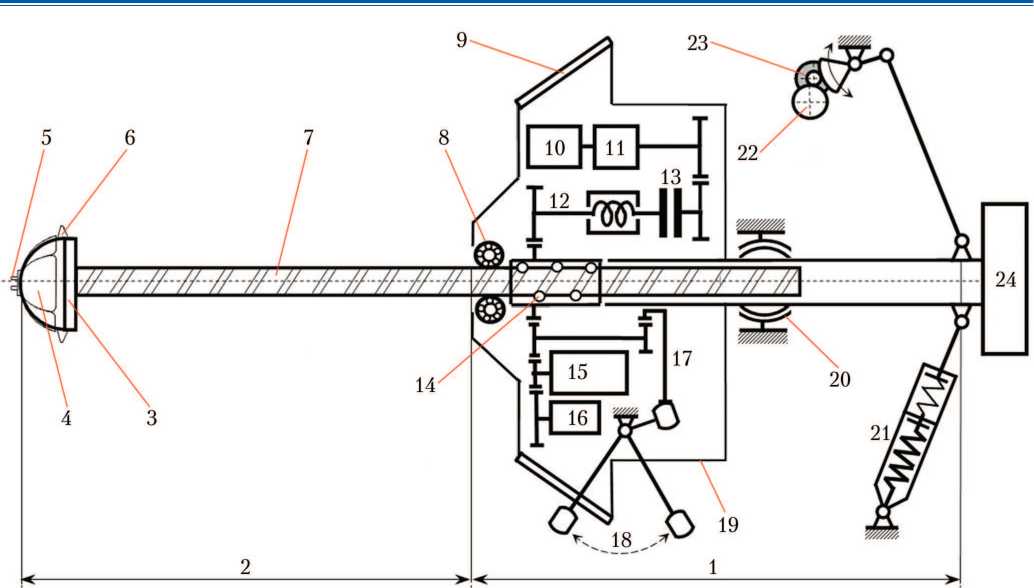
Рис. 2. Упрощённая кинематическая схема стыковочного механизма (СтМ) системы стыковки с внутренним переходом: 1 — осевой и боковой демпферы; 2 — штырь; 3 — головка штыря; 4 — датчик ДК1; 5 — датчик ДК2; 6 — защёлки; 7 — винт; 8 — опорные подшипники; 9 — накладки ограничителя; 10 — электродвигатель; 11 — редуктор; 12 — осевой пружинный механизм (ПМ); 13 — фрикционный тормоз; 14 — шарико-винтовая передача; 15 — два осевых магнитных тормоза (МТ); 16 — датчик линейного перемещения штыря; 17 — кулачок; 18 — три рычага выравнивания; 19 — подвижный корпус; 20 — универсальный шарнир; 21 — два боковых ПМ; 22 — датчики бокового перемещения подвижного корпуса СтМ; 23 — два боковых МТ; 24 — электропривод защёлок (рисунок создан авторами)
Жёсткое и герметичное соединение стыков СтА обеспечивается МГС, привод которого через тросовые передачи и барабаны приводит в движение активные крюки, расположенные вдоль периметра переходного тоннеля. В результате каждый активный крюк активного агрегата входит в зацепление с соответствующим подпружиненным пассивным крюком пассивного агрегата. Параметры пружины и ход крюка определяют силу стягивания стыков. Конструкция направляющих элементов, электро- и гидроразъёмов обеспечивает их податливость для компенсации погрешностей перед их окончательным соединением. Герметичность обеспечивается обжатием дублированного резинового уплотнения на плоскости стыка активного СтА. При стягивании с помощью СтМ и МГС обжимаются расположенные на обоих СтА пружинные толкатели. Накопленная ими энергия используется для разъединения агрегатов при их расстыковке. Конструкция и совместное функционирование МЗ, СтМ и МГС позволяют обеспечить многократную стыковку и расстыковку КА.
После выведения КА выполняется выдвижение штыря приводом СтМ в исходное положение (режим ВИПШ). Для скоротечного процесса стыковки со случайными начальными условиями используется наиболее простой и надёжный автоматический цикловый режим управления, использующий показания датчиков наступления определённых событий. Например, сигнал датчика ДК1, указывающий на контакт головки штыря с приёмным конусом, инициирует включение реактивных двигателей активного КА, создающих осевую силу для ускорения сцепки, а сигнал датчика ДК2 контакта головки с дном приёмного гнезда вместе с сигналом датчика ДЗГ приводит к их выключению. Интервалы между событиями контролируются системой управления бортовым комплексом КА. При превышении их допустимых значений автоматический режим прерывается, и дальнейшее управление может быть выполнено отдельными командами вручную. Если в течение 10 с после первого контакта не достигнута сцепка, то система управления бортовым комплексом активного КА для обеспечения безопасности выдаёт команду включения реактивных двигателей на отвод. После сцепки, при наличии сигналов ДЗГ и ДК2, запускается автоматический режим, при котором команды на приводы механизмов СтА выдаёт прибор управления системой стыковки.
Агрегаты ССВП для стыковки транспортных пилотируемых и грузовых кораблей к ОС показаны на рис. 3. Они обозначаются обычно добавлением к их индексу символов «0А». Для стыковки к ОС «Мир» более массивных модулей увеличена свободная длина штыря (ход осевого демпфера). В боковом демпфере введены дополнительные управляемые МТ, которые подключаются к кинематической цепи после завершения поглощения энергии осевого сближения до начала выдвижения рычагов. Такая модификация обозначается обычно добавлением к индексу агрегатов символов «0А2».
Кроме ССВП, на практике были реализованы ещё две системы типа «штырь–конус». СтМ кораблей Apollo [4, 5] для стыковки с лунным модулем и ОС Skylab и для перехода экипажа снимался и устанавливался вручную. Он приводился в движение пневматическими устройствами при ограниченном количестве баллонов и, соответственно, стыковок. Другая система, предназначенная для стыковки транспортных кораблей снабжения к ОС «Салют-7» [6], также использовала невосполняемые источники энергии (сжатый азот), что приводило к зависимости основных параметров СтМ от текущего давления и температуры, а также к отсутствию функционального резервирования. Кроме того, масса этой системы примерно вдвое превышала массу СтА ССВП.
В ходе реализации в 1972–1975 гг. международной программы «Экспериментальный полёт “Аполлон – Союз”» (ЭПАС) [7] были разработаны принципиально новые СтА, в которых направляющие элементы — кольца с направляющими выступами — были одинаковыми для обоих агрегатов и устанавливались на механизмах, расположенных на периферии корпуса, оставляя свободной для прохода их центральную часть (рис. 4). Это позволяло
а)

б)
Рис. 3. Активный (а) и пассивный (б) стыковочные агрегаты системы стыковки с внутренним переходом: 1 — приёмный конус; 2 — гнездо приёмного конуса; 3 — плоскость стыка; 4 — активные и пассивные крюки; 5 — электроразъёмы; 6 — толкатели; 7 — гидроразъёмы; 8 — направляющие штырь и гнездо (фотографии из архива РКК «Энергия»)
каждому из агрегатов при изменении конфигурации СтМ выполнять как активные, так и пассивные функции, т. е. потенциально обеспечивать функции спасения экипажа. Такие агрегаты стали называть андрогинными периферийными. В обоих СтА упоры и МЗ, СтМ и МГС были совместимыми, но всё же имели различную кинематику. Основой МЗ являлась предварительная американская разработка, а основой
МГС был аналогичный механизм СтА ССВП. При сцепке защёлки входили в зацепление с механическими упорами на корпусе ответного агрегата. Совместимость агрегатов обеспечивалась согласованием геометрии и размеров взаимодействующих элементов конструкции. Кольца с направляющими в обоих СтМ устанавливались на 6-степенные платформенные механизмы. В американском СтМ [8] шесть штанг, соединяющих кольцо с корпусом СтА, двигались поступательно, независимо и имели пружинногидравлические амортизаторы. Втягивание СтМ за плоскость стыка обес- печивалось независимой тросовой системой с электроприводом. Особенности и недостатки такой конструкции рассмотрены в работе [2]. Кинематика механизма разработки НПО «Энергия» была более сложной: для улучшения сцепки и демпфирования энергии использовались дифференциальные связи между штангами. Впоследствии она была частично упрощена.
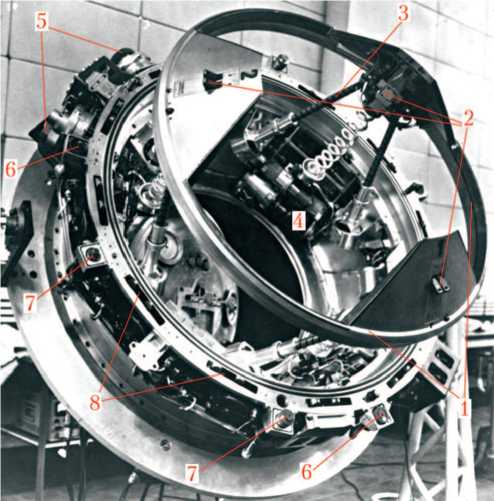
Рис. 4. Периферийный стыковочный агрегат АПАС-89: 1 — кольцо с направляющими выступами; 2 — защёлки и механизм защёлок; 3 — штанги стыковочного механизма; 4 — блок дифференциалов и электропривод; 5 — электроприводы механизма герметизации стыка; 6 — активные и пассивные электроразъёмы; 7 — активные и пассивные гидроразъёмы; 8 — активные и пассивные крюки (фотография из архива РКК «Энергия»)
При разработке системы стыковки для стыковки орбитального корабля (ОК) «Буран» к ОС «Мир» необходимо было учесть следующие особенности.
Корабль и станция имели большие размеры и массу. Из-за компоновки ОК направление сближения и стыковки было выбрано нормальным к его продольной оси, вдоль которой расстояние между его центром масс (ЦМ) и центром активного СтА составляло примерно 10 м. После сцепки корабль по инерции начинает вращаться относительно ОС вследствие его поступательной скорости сближения. Из-за удаления СтА от ЦМ ОК необходимо демпфировать большую кинетическую энергию вращения, выравнивать несимметричные КА при стягивании, выполняя ограничения на максимально допустимые углы их рассогласования. Все эти факторы определили невозможность использования для стыковки СтА ССВП из-за их конструктивных особенностей и малой энергоёмкости.
Для ОК «Буран» был разработан новый, улучшенный вариант андрогинного периферийного агрегата стыковки (АПАС), который по окончании своей наземной экспериментальной отработки получил название АПАС-89. СтМ и направляющие выступы его кольца размещались внутри переходного тоннеля, диаметр которого обеспечил зону свободного прохода, такую же, как у ССВП. Такая геометрия позволила более полно использовать пространство вокруг корпуса СтА. Конструкция МЗ, разработанная для АПАС, была адаптирована под новую геометрию выступов. Бóльшую, по сравнению с ССВП, несущую способность стыков обеспечили 12 пар активных и пассивных крюков МГС, разделённых на две независимые кинематические цепи с отдельными приводами (рис. 4). Активные и пассивные электро- и гидроразъёмы, в отличие от ССВП, располагались не на стыковочной плоскости, а крепились к боковой поверхности снаружи корпуса агрегата.
Упрощённая кинематическая схема СтМ АПАС-89 приведена на рис. 5. В кинематических цепях штанг, соединяющих кольцо с направляющими выступами и корпус агрегата, поступательное движение винтов преобразуется с помощью ШВП во вращательное. Его дальнейшее распределение и демпфирование осуществляется только вращательными устройствами, малые габариты которых обусловлены большим коэффициентом передачи ШВП. Штанги связаны попарно через свои винты и ШВП, а пáры штанг (ПШ) — через ПМ ПШ и блок дифференциалов (БД). Разность хода винтов в ПШ соответствует, в основном, боковым смещениям кольца и его вращению относительно продольной оси СтА. Такие движения фиксируются датчиками рассогласования и демпфируются ПМ и МТ на кольце, расположенными под направляющими выступами. Согласованные вращения ШВП в ПШ демпфируются МТ большой энергоёмкости. Эти вращения через обладающие большой жёсткостью ПМ пар штанг передаются на три входные оси блока из трёх дифференциалов, который перераспределяет движение в направлении наименьшего момента сопротивления. При этом общая для всех входных осей БД величина момента соответствует просадке кольца, т. е. перемещению его центра вдоль продольной оси СтМ. Она передаётся на соответствующие ПМ и ФрТ, которые демпфируют энергию сближения КА. Разность ходов ПШ, соответствующая разворотам кольца по тангажу и рысканию, фиксируется двумя датчиками рассогласования БД. Магнитные тормозы и пружинные механизмы ПШ вместе с БД позволяют перераспределить и демпфировать кинетическую энергию вращения, обусловленную удалённостью центра масс ОК относительно СтА. Все ПМ имеют внутренние механические упоры, ограничивающие перемещения кольца. ПМ демпфера энергии сближения обеспечивает плавное увеличение осевой силы сопротивления СтМ. Выходная ось ФрТ заторможена суммарным моментом стопорных муфт привода, а входная ось создаёт момент сопротивления вращению выходного вала БД. При управляемом движении выравнивания и стягивания ФрТ вращается в направлении, противоположном демпфированию, и передаёт на БД суммарный момент электродвигателей привода. ФрТ создаёт различные противодействующие моменты при вращении его осей в противоположных направлениях. Соответственно, сила сопротивления СтМ при поглощении энергии сближения меньше, чем создаваемая им сила стягивания при окончательном жёстком и герметичном соединении агрегатов.
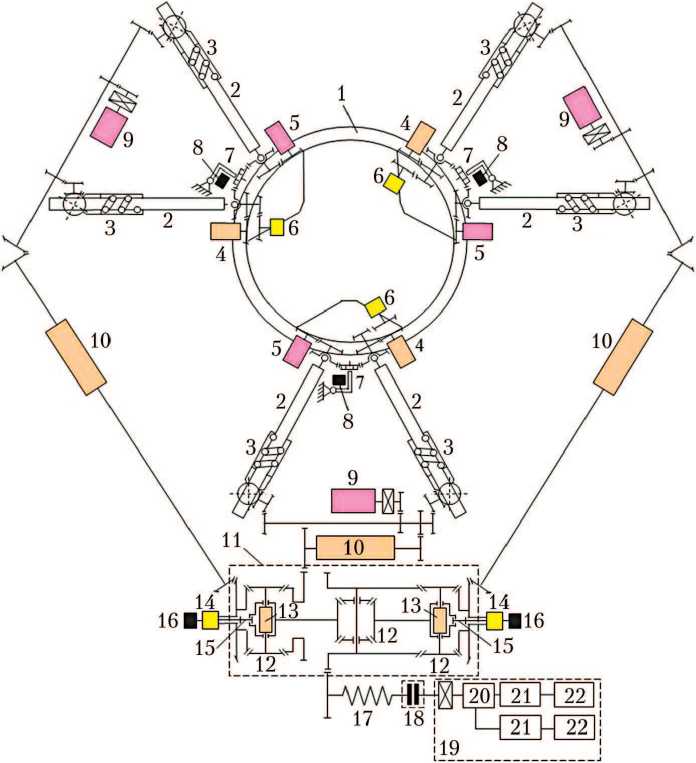
Рис. 5. Упрощённая кинематическая схема стыковочного механизма агрегата АПАС-89: 1 — стыковочное кольцо с направляющими выступами; 2 — штанги-винты; 3 — шарико-винтовые передачи; 4 — пружинные механизмы (ПМ) на кольце; 5 — магнитные тормоза (МТ) на кольце; 6 — датчики рассогласования на кольце; 7 — фиксаторы кольца; 8 — электромагниты фиксаторов кольца; 9 — МТ пар штанг; 10 — ПМ пар штанг; 11 — блок дифференциалов (БД); 12 — дифференциалы БД; 13 — ПМ БД; 14 — датчики рассогласования БД; 15 — фиксаторы БД; 16 — электромагниты фиксаторов БД; 17 — ПМ; 18 — фрикционный тормоз демпфера энергии сближения орбитального корабля; 19 — электропривод; 20 — дифференциал привода; 21 — муфты стопорные; 22 — электродвигатели (рисунок создан авторами)
Управление механизмами в периферийной системе стыковки осуществляется в автоматическом цикловом режиме, примерно так же, как в ССВП. Перед стыковкой СтМ активного агрегата выводится приводом в некоторое промежуточное исходное положение, кольцо пассивного агрегата остаётся во втянутом, конечном положении. При стыковке первый контакт кольца активного СтМ с пассивным вызывает срабатывание его датчиков рассогласования на кольце или в БД. Их сигнал передаётся в систему управления бортовым комплексом ОК и инициирует включение реактивных двигателей «дожатия» для ускорения сцепки. Если контакт приводит к развороту активного кольца по тангажу или рысканию, то за счёт перераспределения в БД энергии движения между ПШ этот разворот увеличивается и ускоряет сцепку, которая фиксируется датчиками на кольце. Мощные МТ в ПШ включаются только после сцепки и поглощения энергии осевого сближения. Для выравнивания СтМ выдвигается в переднее положение, в котором винты всех штанг выдвинуты максимально. После некоторой задержки для демпфирования электромагниты включают фиксаторы на кольце и в БД, блокируя отклонения СтМ при стягивании, соответствующем движению кольца из переднего в конечное положение. Как и в ССВП, стягивание заканчивается при срабатывании датчиков закрытия стыка.
Большая сложность конструкции СтМ АПАС компенсировалась тем, что его использование предполагалось многократным, при спуске ОК «Буран» он находился внутри отсека полезного груза (ОПГ). Более сложно, по сравнению с ССВП, достигалась сцепка, так как для этого необходимо совместить положение не одной (головка штыря — вершина приёмного конуса), а трёх пар точек на кольцах активного и пассивного СтА. Несмотря на эти недостатки, АПАС оказался единственным агрегатом, способным пристыковать к станции КА с уникальными массовоинерционными характеристиками, такие как ОК «Буран» и Space Shuttle .
Наземная отработка динамики стыковки кораблей и модулей, а также ОК «Буран» к ОС «Мир», была выполнена на стенде «Конус» [9] (рис. 6). Он был создан в начале 1980-х гг. в РКК «Энергия» на основе опыта наземных динамических испытаний по программе ЭПАС на аналогичном американском стенде в Космическом центре им. Л. Джонсона в Хьюстоне. Стенд реализует гибридное моделирование стыковки от момента первого контакта СтА. Относительное движение стыкуемых КА описывается дифференциальными уравнениями, на основе их численного интегрирования формируются управляющие сигналы на гидроприводы 6-степенной платформы, которая перемещает один из реальных агрегатов относительно другого, установленного на неподвижной части стенда. Силы контактного взаимодействия измеряются тензометрическими датчиками и поступают в компьютер для расчёта движения. Из-за конечной величины шага интегрирования и увеличения контактной жёсткости при соединении стыков СтА воспроизводится лишь начальная фаза процесса стягивания, чтобы обеспечить устойчивость решения дифференциальных уравнений.

Рис. 6. Андрогинно-периферийные агрегаты стыковки на 6-степенном стенде «Конус» для динамических испытаний (фотография из архива РКК «Энергия»)
В течение первых 25 лет развития российских систем стыковки были разработаны два принципиально различных типа СтА с примерно одинаковой концепцией управления. Выполнена их наземная и лётная отработка. Системы центрального типа (ССВП)
обеспечили сборку и обслуживание ОС «Салют» и «Мир». Периферийные системы значительно расширяли класс стыкуемых объектов и открывали возможность построения ещё более крупных ОС.
Программа «Мир–Shuttle»
Стыковка ОК «Буран», запланированная на полёт 2К1, по известным причинам не состоялась. Но осенью 1992 г. в РКК «Энергия» совместно со специалистами NASA и Rockwell International были проведены динамические испытания на 6-степенном стенде «Конус» для оценки возможности использования российского АПАС-89 для американского ОК Space Shuttle . Объективной причиной для этого являлось отсутствие американской системы стыковки, необходимой при доставке на орбиту к месту сборки модулей и других элементов конструкции ОС Freedom .
Совместные с американскими специалистами динамические испытания, проведённые в РКК «Энергия», завершились успешно. Тем не менее уже на этой стадии были намечены некоторые модификации в процедуре управления. В циклограмме функционирования СтМ была увеличена задержка после сцепки на включение мощных МТ ПШ, что позволило снизить нагрузки при поглощении энергии сближения. Был также изменён профиль работы двигателей ОК для парирования его угловых движений после сцепки. Возможность АПАС выполнить операцию в полном объёме, вплоть до создания герметичного соединения, была подтверждена в ходе успешной стыковки пилотируемого КК «Союз ТМ-16», оснащённого этим СтА, к ОС «Мир» в январе 1993 г. Всё это стало прологом к программе «Мир– Shuttle », заключению контракта на изготовление нескольких экземпляров АПАС-89 и их интеграцию в конструкцию ОК Space Shuttle . В 1993 г. были проведены ещё две серии уточняющих испытаний, а в 1994 г. — квалификационные динамические испытания агрегата, изготовленного для ОК, в т. ч. с воспроизведением температурных режимов (от -50 до +50 ° С).
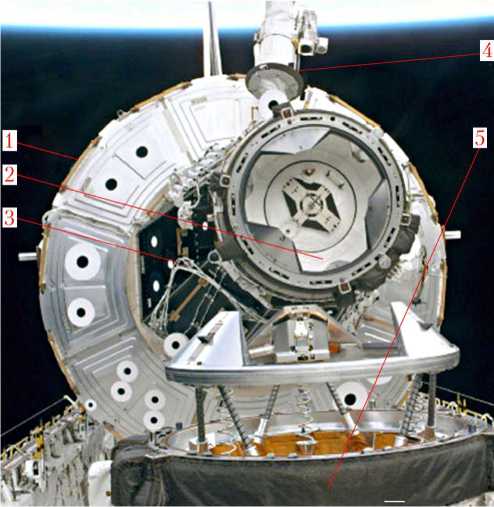
Как и на ОК «Буран», активный АПАС на ОК Space Shuttle был установлен на переходном тоннеле в передней части ОПГ, недалеко от его кабины. АПАС на осевом порту модуля «Кристалл» являлся пассивным, его кольцо было втянуто за плоскость стыка. Первая стыковка Space Shuttle к ОС «Мир» состоялась 29 июня 1995 г. в полёте STS -71 ОК Atlantis (рис. 7).
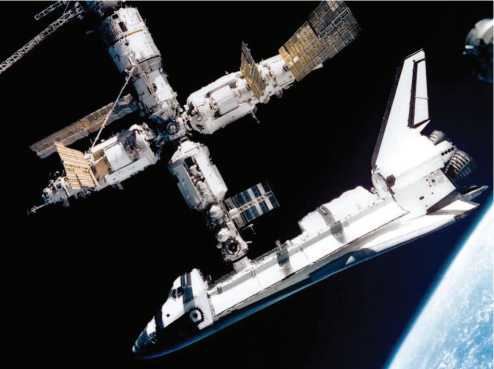
Рис. 7. Первая стыковка корабля Atlantis к орбитальной станции «Мир» (фотография из архива РКК «Энергия»)
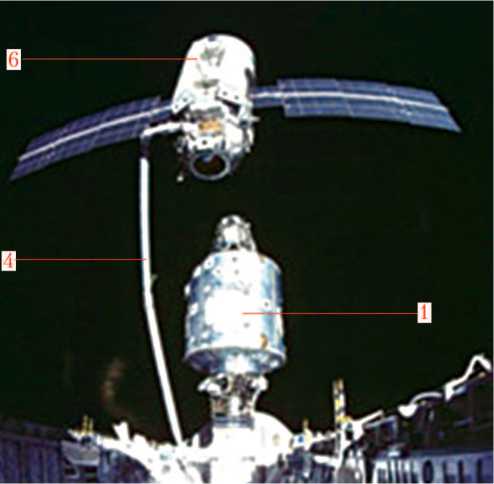
Из-за больших размеров ОК в случае нештатной ситуации было возможно столкновение его хвостовой части с модулем ОС. Для его предотвращения при второй стыковке к станции (15 ноября 1995 г., полёт STS-74 ОК Atlantis) к ней был добавлен разработанный в РКК «Энергия» стыковочный отсек (СО), доставляемый в ОПГ Space Shuttle. Поэтому предварительно СО извлекался из ОПГ и устанавливался на СтА ОК его бортовым манипулятором SRMS (Shuttle Remote Manipulation System). По оценке специалистов NASA и Rockwell International, сила, развиваемая SRMS, была недостаточной для обеспечения сцепки АПАС. По новой процедуре стыковки манипулятор перемещал СО с пассивным АПАС в положение перед активным АПАС на переходном тоннеле ОК и расслаблял свои шарниры, т. е. переводил их в состояние, при котором они не оказывают сопротивления внешним силам и моментам (рис. 8). Далее включались двигатели корабля для его быстрого сближения с СО и сцепки. После достижения жёсткого соединения выполнялась обычная стыковка связки «ОК + СО» к ОС «Мир». Впоследствии подобная операция была выполнена дважды для соединения первых модулей МКС.
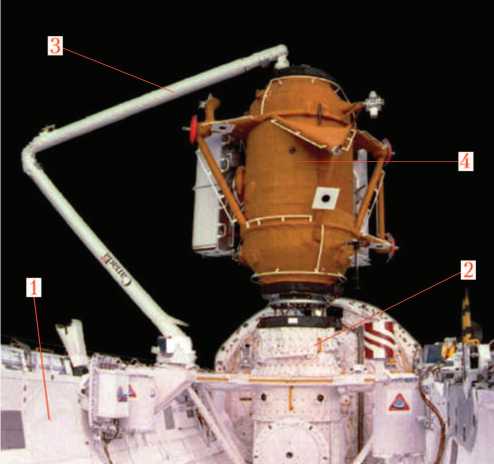
Рис. 8. Установка модуля стыковочного отсека (СО) на орбитальный корабль (ОК) Space Shuttle манипулятором SRMS в полёте STS-74: 1 — отсек полезного груза ОК; 2 — переходный тоннель; 3 — манипулятор SRMS; 4 — СО (фотография из архива РКК «Энергия»)
Всего к ОС «Мир» с 1993 по 1998 гг. было выполнено 10 стыковок КК «Союз» и ОК Space Shuttle с помощью АПАС. Успешное выполнение данных операций ещё до завершения программы «Мир– Shuttle » подтвердило возможность стыковки таких крупногабаритных и массивных объектов, как ОК и ОС, и открыло дорогу к началу сборки МКС.
Модификация российских систем стыковки для МКС
При адаптации к МКС систем стыковки ОК и модулей необходимо было учитывать, что новая станция по сравнению с ОС «Мир» имеет значительно большие размеры и массу. Соответственно, возрастают нагрузки на СтА, соединяющие модули. Также в конструкции МКС имеются более чувствительные к нагрузкам элементы, в частности приводы и панели солнечных батарей американского сегмента (АС). С учётом этих особенностей были разработаны различные способы стыковки. Соединение новых модулей АС, доставляемых ОК Space Shuttle, осуществлялось по технологии причаливания (berthing). Они извлекались из ОПГ, перемещались манипуляторами SRMS или SSRMS (Space Station Remote Manipulation System) и соединялись с помощью американских агрегатов CBM (Common Berthing Mechanism) [10], имеющих направляющие элементы, простые механизмы для первичного зацепления и управляемые приводами силовые болты. Контактные нагрузки были незначительными, и демпфирующие устройства в СВМ отсутствовали. Поэтому основным возмущающим фактором на конструкцию АС МКС при её сборке являлась стыковка ОК Space Shuttle. На основе проведённого анализа динамики стыковки в конструкцию СтМ АПАС-89 были введены следующие изменения.
Для уменьшения сил, возникающих при поглощении энергии сближения, ПМ демпфера энергии сближения (поз. 17 на рис. 5) был заменён на дополнительный ФрТ с малым моментом сопротивления. Был также добавлен специальный механизм, включающий в кинематическую цепь либо дополнительный, либо основной ФрТ (поз. 18 на рис. 5). Дополнительный тормоз обеспечивал более чем двукратное снижение осевых нагрузок на этапе поглощения энергии. Основной ФрТ работал только на этапе жёсткого соединения, обеспечивая ограничение силы стягивания. Энергоёмкость МТ на кольце (поз. 5 на рис. 5) была увеличена за счёт изменения передачи, а сами тормоза были сделаны управляемыми. Как и МТ ПШ (поз. 9 на рис. 5), они включались только после завершения поглощения энергии осевого сближения. Это обеспечивало сцепку с меньшими нагрузками и уменьшало боковые и угловые перемещения ОК по крену. Модифицированный таким образом агрегат получил название АПАС-95. Эффективность изменений была подтверждена в ходе динамических испытаний на стенде «Конус» в сентябре–октябре 1996 г. Квалификационные испытания агрегатов были завершены в 1997 г.
Для соединения модулей российского сегмента (РС) МКС были использованы агрегаты типа «штырь–конус». Но для увеличения их несущей способности конструкция корпуса и МГС, а также электро- и гидроразъёмов, была выбрана примерно такой же, как и у АПАС. Увеличение, по сравнению с ССВП, диаметра корпуса и более жёсткие ограничения на углы разворота после сцепки привели к изменению геометрии приёмного конуса, который также устанавливался на крышке переходного люка СтА. Для стыковки модулей использовались СтМ ССВП типа 0А2, проверенные при сборке ОС «Мир». На его последних модификациях в приводе были использованы дублированные электродвигатели (поз. 10 на рис. 2). Модифицированные таким образом агрегаты типа «штырь–конус» получили условное название «гибридные» (рис. 9). На корме модулей, к которым должны были стыковаться пилотируемые и транспортные корабли, были установлены пассивные СтА ССВП.
а)

б)
Рис. 9. Гибридные стыковочные агрегаты типа «штырь–конус»: а — активный; б — пассивный (фотографии из архива РКК «Энергия»)
В целом модификации российских систем стыковки не были радикальными, они обеспечивались предыдущим заделом, реализации программ «Мир» и ОК «Буран».
созданным при
ОС «Салют»,
Сборка и обслуживание МКС
Для стыковки с ОК Space Shuttle на МКС устанавливались пассивные АПАС, не имевшие СтМ и МЗ. Так как модули АС изначально должны были соединяться только с помощью манипулятора и СВМ , то для их сопряжения с АПАС были разработаны три герметизированных адаптера PMA ( pressurized mating adapter ) [11], доставляемые, как и модули, в ОПГ ОК. Первые два адаптера были установлены на осевые причалы модуля Unity ( NODE1 , Узловой 1). РМА1 с наружной стороны имел активный АПАС для стыковки с модулем «Заря» (ФГБ — функционально-грузовой блок), а РМА2 — пассивный, для стыковки с ОК Space Shuttle . На ФГБ для соединения с NODE1 был установлен пассивный АПАС, а с обратной стороны — активный гибридный СтА. Также имелся боковой надирный причал с пассивным СтА ССВП.
Сборка МКС началась в течение полёта STS-88 ОК Endeavour (5–7 декабря 1998 г.) с соединения двух первых модулей — NODE1 и ФГБ. ФГБ был выведен на орбиту ракетой «Протон», а NODE1 — в ОПГ ОК. По аналогии с полётом STS-74 , манипулятор SRMS перемещал NODE1 из ОПГ (рис. 10, а ) в позицию перед активным СтА ОК и переводил свои шарниры в расслабленное состояние. Далее выполнялась стыковка по ранее отработанной схеме. После этого активная связка «ОК + NODE1 » аналогичным способом должна была соединиться с ФГБ. Однако размеры переходного тоннеля и соединяемых модулей оказались таковы, что два наиболее длинных звена манипулятора вытянулись практически в прямую линию (рис. 10, б ). В такой конфигурации «рука» оказывала сопротивление даже при расслабленных шарнирах, поэтому было принято решение выполнить стягивание NODE1 и ФГБ без удержания его манипулятором.
Новая связка «ФГБ + NODE1 » после отделения от ОК при сближении и стыковке с модулем «Звезда» (служебным модулем — СМ) 26 июля 2000 г. выполняла функции активного КА. Теоретический анализ и экспериментальная отработка динамики этой операции с помощью системы типа «штырь–конус» были выполнены в 1996 г.
а)
б)
Рис. 10. Стыковка первых модулей МКС: а — модуль NODE1 перед установкой на андрогинный периферийный агрегат стыковки (АПАС) орбитального корабля (OK) Space Shuttle; б — захват функционально-грузового блока (ФГБ) манипулятором SRMS: 1 — NODE1; 2 — пассивный АПАС; 3 — герметизированный адаптер РМА2; 4 — манипулятор SRMS; 5 — активный АПАС на переходном тоннеле ОК; 6 — ФГБ (фотографии из архива РКК «Энергия»)
На одном из осевых портов СМ был установлен пассивный гибридный СтА для стыковки с «ФГБ + NODE1 », на другом — пассивный СтА ССВП для приёма российских транспортных и грузовых кораблей, также имелись два боковых порта (надирный и зенитный) с пассивными гибридными СтА для стыковки новых модулей РС МКС. Состыкованные модули NODE1 , ФГБ и СМ стали ядром строящейся МКС, которое позволило относительно независимо наращивать конструкцию её АС и РС.
При строительстве и обслуживании АС МКС агрегаты АПАС обеспечивали стыковки к его портам ОК Space Shuttle . РМА3 был доставлен в октябре 2000 г. (полёт STS-92 , ОК Discovery ). В процессе сборки модулей с помощью манипуляторов SRMS (а позднее и SSRMS ) РМА2 и РМА3 и установленные на них пассивные АПАС несколько раз меняли своё положение. В окончательной конфигурации АС они обеспечивают орбитальный ( РМА2 ) и зенитный ( РМА3 ) порты на модуле Harmony ( NODE2 ). Всего при строительстве АС МКС с 1998 по 2011 г. к нему было выполнено 37 стыковок ОК Space Shuttle .
Сборка и обслуживание РС МКС осуществлялась с использованием СтА типа «штырь–конус». Гибридные СтА обеспечили стыковку 17 сентября 2001 г. к надирному порту СМ модуля «Пирс» (стыковочного отсека 1, СО-1), а 12 ноября 2009 г. — к зенитному порту модуля «Поиск» (малого исследовательского модуля 2, МИМ-2). Модуль «Рассвет» (малый исследовательский модуль 1, МИМ-1) был доставлен в ОПГ ОК Atlantis (полёт STS-132). Манипулятор SRMS извлёк его и передал манипулятору SSRMS, который перенёс МИМ-1 к надирному порту ФГБ и состыковал с ним 18 мая 2010 г. Эта операция выполнена с использованием активного (МИМ-1) и пассивного (ФГБ) СтА ССВП. Стыковка с помощью манипулятора, т. е. причаливание, выполнялась на РС МКС впервые. Для надёжной сцепки СтА необходима некоторая начальная скорость, кинетическая энергия. Манипулятор подводит соединяемый модуль практически с нулевой скоростью и обеспечивает незначительную силу проталкивания головки СтМ в гнездо приёмного конуса. Проблема была решена за счёт очень точного позиционирования активного агрегата относительно пассивного. Анализ динамики и выбор режима управления манипулятором при выполнении причаливания проводились в 2009–2010 гг. на стенде моделирования в реальном времени Systems Engineering Simulator [12] в Космическом центре им. Л. Джонсона в Хьюстоне и на стенде «Конус» в РКК «Энергия» [13].
Модуль СО1 был отстыкован от надирного порта СМ 26 июля 2021 г. с помощью КК «Прогресс МС-16». Его место 29 июля занял модуль «Наука» (многоцелевой лабораторный модуль, МЛМ). Он имел на переднем порту активный гибридный СтА с дублированными электродвигателями привода СтМ для повышения надёжности. Управление всеми его механизмами осуществлял цифровой блок. На кормовом порту МЛМ был установлен комбинированный пассивный агрегат. До прихода следующего модуля он обеспечивал стыковку кораблей с помощью установленного на нём временного стыковочного адаптера, имеющего механический интерфейс пассивного агрегата ССВП. Модуль имел также боковой причал с модифицированным активным агрегатом для причаливания европейским манипулятором ERA шлюзовой камеры (ШК), доставленной ранее на модуле МИМ-1. Манипулятор был установлен на внешней поверхности МЛМ и выведен вместе с ним.
Корабль «Прогресс МС-17» отстыковал временный адаптер 25 ноября 2021 г. и кормовой СтА МЛМ стал пассивным гибридным. Специализированный грузовой корабль «Прогресс-М» 26 ноября 2021 г. пристыковал к нему модуль «Причал» (узловой модуль, УМ) с четырьмя боковыми гибридными пассивными агрегатами. Пассивный гибридный СтА на надир-ном порту УМ имеет временный стыковочный адаптер с интерфейсом ССВП для стыковки российских кораблей.
На кормовых портах всех российских модулей установлены пассивные СтА ССВП для обеспечения стыковок к ним КК «Союз» и «Прогресс», необходимых для обслуживания РС МКС. К пассивным портам модулей МИМ-1 и МИМ-2 выполнялись стыковки пилотируемых кораблей, к порту СО-1 — в основном транспортных кораблей. К кормовому причалу СМ стыковались как пилотируемые, так и транспортные корабли, в т. ч. и европейские ATV (Automated Transfer Vehicle). Корабли ATV имели массу немногим более 20 т, поэтому на них были установлены активные агрегаты ССВП типа 0А2. Управление их механизмами осуществлялось специально разработанными цифровыми блоками управления. Всего было выполнено пять стыковок таких кораблей: первая стыковка — ATV-1 Jules Verne (3 апреля 2008 г.), последняя — ATV-5 Georges Lemaître (12 августа 2014 г).
Стыковочные агрегаты типа «штырь– конус» и андрогинные, разработанные для реализации программ ОС «Мир» и ОК «Буран», с относительно небольшими модификациями обеспечили все стыковки, необходимые для сборки МКС, а также обслуживание её РС.
Интерфейс АПАС — основа международного стандарта систем стыковки IDSS
Без стандартизации систем стыковки невозможна реализация международных проектов. Первый положительный шаг в этом направлении был реализован при выполнении программы ЭПАС. Специалисты СССР и США тогда согласовали все необходимые интерфейсы по сопряжению СтА. Сами же агрегаты и их механизмы были разработаны на основе различных технических решений.
С середины 1990-х гг. NASA начало разрабатывать концепцию нового периферийного СтА. Главным критерием при принятии технических решений было снижение нагрузок при стыковке. Для этого предполагалось скоротечный механический процесс сцепки со случайными начальными условиями обеспечить с помощью электромагнитов и управляемых компьютером электроприводов. Такое решение требовало значительного сокращения диапазона начальных условий и подходило больше для причаливания, чем для стыковки. Система получила название LIDS (Low Impact Docking System) [14]. Позднее к этой работе было привлечено ESA. Европейский, конструктивно более совершенный вариант системы, получил название IBDM (International Berthing Docking Mechanism) [15]. В 2009 г. к работе над стандартной системой стыковки были привлечены специалисты РКК «Энергия». Но предлагаемая NASA и ESA концепция СтА, основанная на активной, т. е управляемой сцепке, требовала значительного изменения уже сложившегося и используемого в программе МКС механического и электрического интерфейсов СтА. После трудных дискуссий в 2013 г. NASA согласилось взять за основу проверенные на практике технические решения, т. е. механический интерфейс АПАС, основанный на пассивной сцепке с помощью механических защёлок. После этого началась конструктивная работа над стандартом, который получил название IDSS (International Docking System Standard) [16]. Но при сохранении геометрии кольца АПАС партнёры-разработчики ориентировались на максимальное упрощение механики СтМ за счёт использования для поглощения энергии управляемых электроприводов. Это привело к значительному ограничению на развиваемую СтМ силу стягивания и в конечном итоге — к модификации МГС и расположения его элементов. В результате интерфейс АПАС претерпел в стандарте незначительные изменения. С учётом этого NASA заключило с РКК «Энергия» контракт, по которому были разработаны три стыковочных адаптера IDA (International Docking Adapter). Их доставка на МКС выполнялась грузовым кораблём Dragon компании SpaceX. Полёт с IDA-1 был аварийным. Адаптеры IDA-2 и IDA-3 были доставлены и во время сеанса внекорабельной деятельности астронавтов были установлены с помощью манипулятора SSRMS на пассивные агрегаты АПАС адаптеров PMA2 и PMA3. После этого к ним было выполнено более 40 стыковок американских кораблей, разработанных компаниями SpaceX и Boeing.
Выводы
Разработанные РКК «Энергия» системы стыковки, типа «штырь–конус» и периферийные, обеспечили ключевую технологию соединения КА, необходимую для сборки МКС, её АС и РС. Это были единственные российские системы, интегрированные в конструкцию американского ОК и европейского «грузовика» ATV . Интерфейс АПАС-95 для МКС стал основой международного стандарта систем стыковки.
Системы стыковки создавались и совершенствовались коллективом, который с 1966 по 1977 гг. возглавлял Вильницкий Л.Б.; с 1977 по 2004 гг. — д.т.н., член-корреспондент РАН Сыромятников В.С., а с 2004 по 2022 гг. — Павлов В.Н. Основными их разработчиками являлись: Сыромятников В.С., Бобров Е.Г., Обман-кин И.М., Ерёмченко И.В., Кащеев П.Б., Тихонов В.И., Фролов Л.И., Земцов Г.А., Пучков А.Е, Шепел-кин Н.А. — агрегаты и механизмы ; Каверина И.П., Обжерин В.В. — корпусы СтА ; Тюкавин Р.И. — датчики, контактные устройства ; Турбин Ю.И., Рязанова С.В. — МГС ; Темнов С.С., Гмырина З.А., Ряб-ко Е.Н., Староверова Т.Б. — прочностной анализ корпусов и механизмов ; Розенберг О.М., Чижиков Б.С., Павлов В.Н., Поливода А.В. — разработка наземного испытательного оборудования и проведение отработки СтА ; Вакулин Б.Ф., Рыда-нов В.Т., Панин Е.И., Поляков В.Г., Зубков В.А., Елисеев Е.В., Свобо-дин П.А., Агапов Н.Р. — разработка схем и приборов управления ; Суб-чев А.И., Колобова Н.А., Фролова Л.М., Шведова Л.С., Егорова Н.Ю. — интеграция проектов систем стыковки в проекты кораблей и модулей ; Яскевич А.В. — анализ динамики стыковки и проектирование кинематики СтМ ; Зорин Ю.А., Остроухов Л.Н. — экспериментальная отработка на стенде «Конус» .
Следует особо отметить выдающуюся роль Владимира Сергеевича Сыромятникова в создании перечисленных выше стыковочных агрегатов и в формировании коллектива, который успешно продолжает его дело.
Список литературы Российские системы стыковки для сборки и обслуживания международной космической станции
- What was the Gemini Program: publication dated 22.09.2022 // The National Air and Space Museum: web site. URL: https://airandspace.si.edu/stories/editorial/what-was-gemini-program (accesed 16.07.2024).
- Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
- Сыромятников В.С. 100 рассказов о стыковке и о других приключениях в космосе и на Земле. Ч. 1. 20 лет назад. М.: Логос, 2003. 564 с. Ч. 2.20 лет спустя. М.: Логос, 2008. 567 с.
- Patent US 3526372. IPC B64G 1/00. Expanding center probe and drogue / Paine T.O., Fentress C.E. - inventors, NASA - assignee. Application № 802816, dated 27.02.1969. Published 01.09.1970.
- Langley R.D. Apollo experience report - the docking system: NASA technical note, NASA TN D-6854. Washigton, D.C.: NASA, 1972. 45 p. URL: https://ntrs.nasa.gov/api/citations/19710006871/downloads/19710006871.pdf (accessed 16.07.2024).
