Рычажно-роликовый реверсирующий механизм привода пил типа ПП с гибким режущим органом

Автор: Бардовский Анатолий Данилович, Керопян Амбарцум Мкртичевич, Калакуцкий Алексей Васильевич
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 8, 2011 года.
Бесплатный доступ
В статье приведено описание корректирующего механизма пилы возвратно-поступательного действия устраняющего дефект кинематики движения тяговых канатов. Представлено описание экспериментального стенда, изготовленного для устранения эффекта синхронизации движения ветвей гибкого режущего органа.
Привод, канатная пила, привод канатной пилы, рычажно-роликовый механизм, кулачково-коромысловый, синхронизация
Короткий адрес: https://sciup.org/140215364
IDR: 140215364 | УДК: 621.9.025.7
Текст научной статьи Рычажно-роликовый реверсирующий механизм привода пил типа ПП с гибким режущим органом
В статье [1] был сделан вывод о необходимости устранения дефекта кинематики рычажно-роликового реверсирующего механизма приводов пил типа ПП, а именно несинхронности работы тяговых канатов, используемых при прорезании технологических щелей при добыче угля и природного камня, что позволяет достигнуть гладкой ненарушенной поверхности стен. Синхронизировать движение тяговых канатов можно, если в схему рычажно–роликового реверсирующего механизма ввести устройство, корректирующее работу канатов привода. В качестве такого корректирующего устройства, можно использовать различные типы механизмов, но задача решается наиболее просто, если в этом качестве принять кулачковый механизм.
Такой метод решения задачи синтеза можно назвать методом сведения к кулачковому механизму, и применение его является наиболее рациональным и логичным.
Структурная схема рычажно-роликового реверсора приводов пил типа ПП, снабженного корректирующим механизмом, представлена на рис. 1.
Реверсирующий механизм, осуществляющий возвратно поступательное движение тяговых канатов, состоит из двух рычагов (водил) 1, закрепленных на выходном валу редуктора под углом 180° относительно друг друга. На водилах установлены свободно вращающиеся блоки 2. Имеется две пары уравнительных блоков 3, симметрично расположенных относительно вертикальной плоскости, проходящей через центр вращения водил.
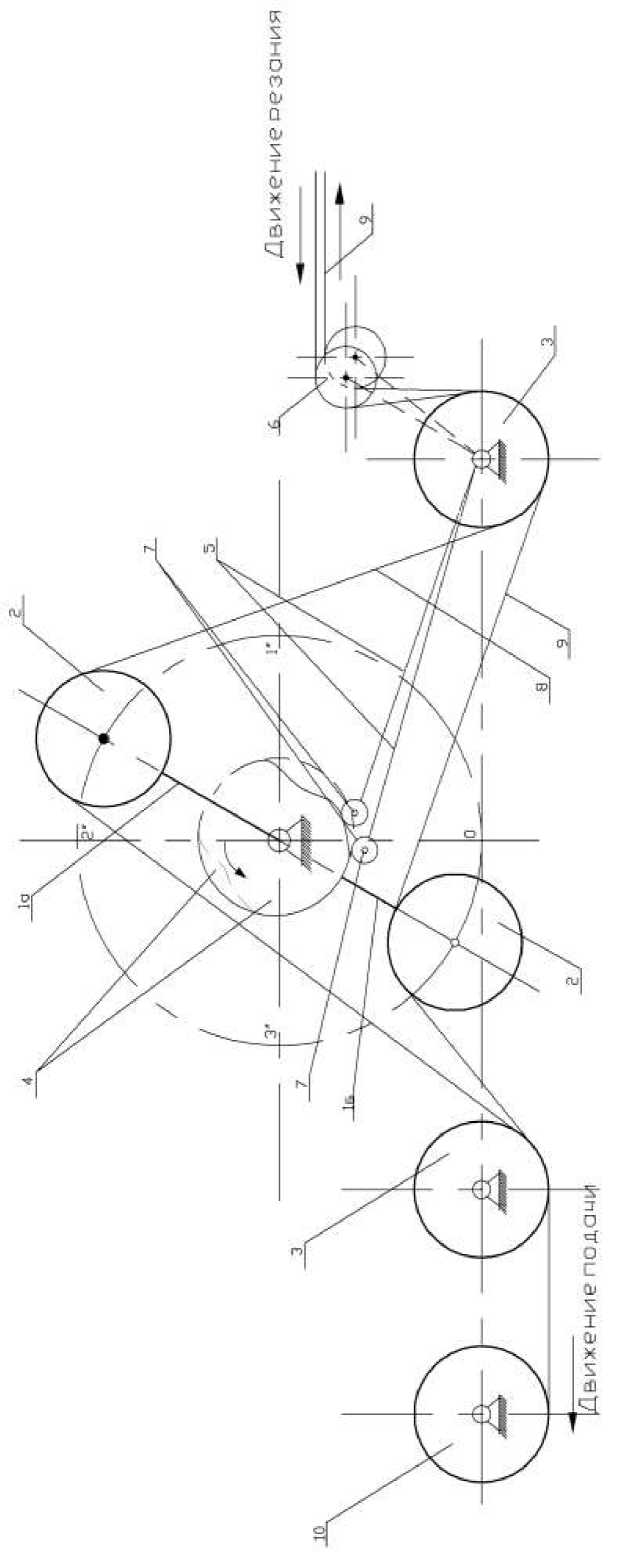
Рис.1. Структурная схема рычажно-роликового реверсора привода пилы типа ПП.
Корректирующий механизм содержит два однотипных корректирующих устройства, каждый из которых состоит из кулачка 4 и двуплечего рычага 5, на коротком плече которого расположен свободно вращающийся отклоняющий блок 6, а на длинном плече ролик 7. Кулачок профилируется таким образом, что, поворачиваясь вместе с рычагом, заставляет через двуплечий рычаг качаться относительно оси отклоняющий блок 6 по определенному закону. Двуплечие рычаги установлены на осях уравнительных блоков, расположенных ближе к режущему органу. Рабочие канаты 8 и 9 от точек закрепления с пилой через направляющие блоки и систему блоков 3, 2 выводятся к барабанам подачи 10 и закрепляются на них.
При непрерывном вращении водил рабочие канаты и пила совершают возвратно-поступательное движение. Несинхронность работы механизма реверсора определяется тем обстоятельством, что, например, водило 1 а при повороте от точки 0 на угол 0°<φ < 180° увеличивает больше длину ведущего каната 8, чем водило 1 б уменьшает длину ведомого каната 9. В рассматриваемый период отклоняющий блок каната 8 должен за счет качательного движения сначала компенсировать недостаток длины каната путем частичного его освобождения сокращением дуг обхвата этим канатом блоков 3 и 6, затем к моменту подхода рычага в положение 2 отклоняющий блок должен вернуться в исходное положение. Следовательно тяговые канаты будут перемещаться синхронизировано.
С целью проверки эффекта синхронизации движения тяговых канатов с помощью рычажно-роликового реверсирующего механизма создан специальный стенд, представляющий собой модель установки канатной пилы возвратно-поступательного действия.
Экспериментальный стенд включает в себя узлы: привод движения резания 1, привод движения подачи 2, раму 3, систему отклоняющих блоков 4, тяговый орган 5, режущий орган и объект разрушения.

Рис. 2. Экспериментальный стенд установки пилы возвратнопоступательного движения.
Привод движения резания (рис. 3) состоит из электродвигателя типа КОМ 22/4 мощностью 2,8 кВт и 1500 оборотов в минуту, червячного редуктора 4 с передаточным отношением i=32 и закрепленных на концах выходного вала 3 спаренных кулачков 5, которые, помимо своих основных функций (применительно к модели привода УПП (усовершенственного привода пилы)) выполняют роль водил для двух вариантов исполнения моделей пил, что было задумано с целью конструктивного упрощения узла привода резания. Кулачки-водила 5 получают вращение от электродвигателя 1 через втулочно-пальцевую упругую муфту 2, червячную пару и выходной вал редуктора 3, На кулачках в точном соответствии с их профилем (см, приложение 2) строго под 1800 высверлены две пары отверстий, в которые в зависимости от типа модели запрессовываются пальцы с надетыми на них по ходовой посадке шкивами 6. На раме, симметрично вертикальной плоскости, проходящей через центр вращения выходного вала редуктора, расположены две пары уравнительных шкивов 7 и 14. На рис. 3 положения этих шкивов соответствуют улучшенному варианту модели привода пилы. Для установления этих шкивов в положение, соответствующее модели привода пилы типа ПП, предусмотрены четыре стояка с приваренными к ним пластинами для крепления опор 12 и 13 вышеупомянутых шкивов.
В улучшенном варианте модели привода оси 2 являются общими опорами для шкивов 7 и двуплечих рычагов 9. Для заедания при относительном движении шкивов и рычагов между ними установлена по ходовой посадке шлифованная шайба. На одном плече (толкателе) двуплечих рычагов закреплен ролик – компенсирующий шкив 8. Для обеспечения полной синхронизации движения тяговых ветвей каната в условиях стендовых испытаний в структурную схему модели пилы введена дополнительная пара шкивов 10.
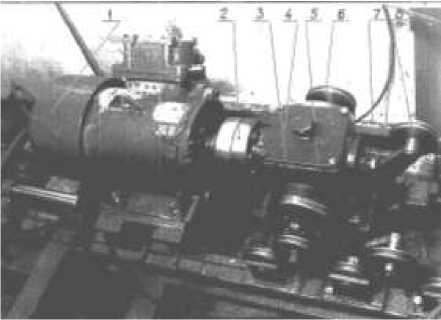
Рис. 3. Привод движения резания модели пилы.
Для осуществления рабочего движения подачи (подтягивания ветвей каната) модель установки пилы снабжена автономным гидроприводом. Масло из редуктора (бака маслостанции) с помощью насоса, П400, производительностью 5 л/мин, p = 200 кг/см2, приводимого в действие электродвигателем КОМ–22/4, через гидрораспределительное устройство и дроссель-регулятор Г-55-31А подается в рабочую полость силового гидроцилиндра. Перед гидрораспределительным устройством установлен предохранительный клапан, выполняющий роль переливного, так как по ходу эксперимента значительную часть масла сливается в бак, минуя силовой цилиндр. Для обеспечения постоянной скорости движения штока гидроцилиндра, независимо от изменяющейся нагрузки на канатах, вместо обычного дросселя установлен дроссель-регулятор, поддерживающий постоянный расход осуществляется посредством обратного клапана Г-5124, включенного в гидросхему параллельно дросселю-регулятору.
На штоке гидроцилиндра 2 с помощью полухомутиков крепится панель, посредством которого через специальные жимки осуществляется соединение тяговых канатов с приводом подачи. Для предотвращения проворота штока в корпусе гидроцилиндра при рабочих нагрузках в канатах в боковые торцы панели впрессованы оси, на которых по ходовой посадке установлены ролики, катящиеся при движении штока по направляющим планкам рамы.
Таким образом, экспериментальный стенд УПП производил рез каменных блоков исключая несинхронность движения канатов, а именно порывы тягового органа, что доказывает правильность внедрения кулачково-коромыслового механизма в привод пилы типа ПП.
Список литературы Рычажно-роликовый реверсирующий механизм привода пил типа ПП с гибким режущим органом
- Бардовский А.Д., Калакуцкий А.В. Исследование характера движения тяговых канатов реверсирующего механизма привода пилы типа ПП.
