Самописец для изучения законов кинематики в школьном и вузовском физическом эксперименте

Автор: Саманов Виктор Васильевич
Журнал: Грани познания @grani-vspu
Рубрика: Естественные науки и методика их преподавания
Статья в выпуске: 3 (8), 2010 года.
Бесплатный доступ
Предложена конструкция механических и электронных узлов двухкоординатного самописца (плоттера) на шаговых электродвигателях для автоматического построения графиков процессов в лабораторном эксперименте по изучению динамики и кинематики.
Кинематика, плоттер, шаговый двигатель, эксперимент
Короткий адрес: https://sciup.org/14821566
IDR: 14821566
Текст научной статьи Самописец для изучения законов кинематики в школьном и вузовском физическом эксперименте
Компьютеризация современной жизни, и в том числе процесса обучения, непрерывно нарастает. Однако при проведении физического лабораторного и демонстрационного эксперимента обработка результатов измерений в большинстве случаев проводится по старинке – или качественно, или пут¸м упрощенного ручного построения графиков методом интерполяции по нескольким экспериментальным точкам, хотя сами компьютеры и разнообразные принтеры к ним почти всем доступны. Причины такого парадокса достаточно просты. Непосредственное подключение датчиков экспериментальной установки к принтерам без компьютера невозможно. А компьютеры без специализированных и достаточно дорогих аналогово-цифровых преобразователей и программ обработки экспериментальных данных также неработоспособны.
Тем не менее широкое распространение цифровой аппаратуры привело к увеличению количества, ассортимента и улучшению качества шаговых электродвигателей. Для управления ими не требуется сложной обработки входных электрических сигналов, нет необходимости в установке датчиков положения роторов, т. к. состояние роторов определяется числом и последовательностью подачи импульсов на обмотки статора. Применение шаговых двигателей позволяет создать достаточно простой, деш¸вый, над¸жный, доступный для повторения даже школьникам самописец для автоматического построения двумерных графиков процессов лабораторного или демонстрационного физического эксперимента.
Возможная кинематическая схема двумерного самописца, наиболее просто реализуемая практически, приведена на рис. 1. Для повышения над¸жности конструкции электродвигатели закреплены на шасси неподвижно, чтобы избежать многократных изгибов и надломов токонесущих проводов. Вращение ротора электродвигателя М(x) по часовой стрелке перемещает каретку с пишущим узлом (пером) только по координате X вправо, а при реверсе – влево. Аналогично работает электродвигатель М(y), но перемещает каретку только по координате Y, не влияя на перемещение вдоль оси X.
В связи с отсутствием датчиков перемещения узлов самописца следует исключить любые проскальзывания в кинематике. Применение зубчатой ременной передачи в самодельных конструкциях практически невозможно, но избежать проскальзывания можно увеличением угла огибания вала двигателя больше критического (например, 360о), чтобы сделать силу трения больше силы тяги при любом типе соприкасающихся поверхностей.
Чёрными точками показаны места крепления нитей и натяжнык пружин.
Стрелками указано движение для увеличения Хи Y рис.1. Кинематическая схема самописца:
Для равномерного, пропорционального времени, перемещения пера вправо по оси X на шаговый двигатель М(х) следует подать четыр¸хфазное переменное импульсное напряжение постоянной, но регулируемой резистором R8 частоты, создаваемой тактовым генератором на триггере Шмитта D1.4 (рис.2).
Четыр¸хфазный генератор выполнен на десятичном сч¸тчике-делителе DD4, коэффициент пересч¸та которого уменьшен до 4 сбросом на «0» с выхода Q4 на вход R.
Возвратить перо в исходное состояние Х = 0 можно инверсией напряжения, питающего одну из обмоток М(х). Реверс осуществляется элементами «ИСКЛЮЧАЮЩЕЕ ИЛИ» D5.3 и D5.4 при подаче на их входы управления положительного напряжения кнопкой «Установка X0».
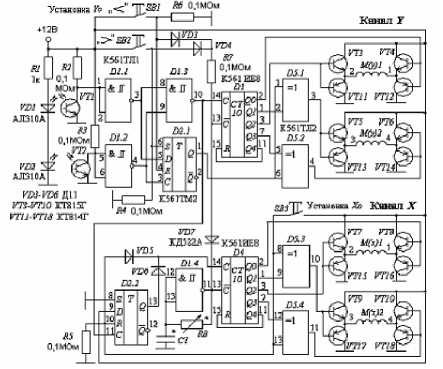
рис. 2 . Принципиальная схема самописца
Для перемещения пера по оси Y пропорционального перемещению, скорости или ускорению на двигатель М(y) следует также подавать четыр¸хфазное напряжение, число импульсов которого должно быть пропорционально записываемой величине, а направление вращения должно зависеть от знака приращения нового е¸ значения по отношению к предыдущему. Генератор канала Y выполнен на D3, D5.1 и D5.2 аналогично каналу X. Электронная часть генератора выполнена на D1.1 – D1.3 и D2.1. Сигналы фототранзисторных датчиков VT1 и VT2 для обо- стрения фронта и спада импульсов подаются на триггеры Шмитта D1.1 и D1.2, а затем поступают в D1.3 и D3.
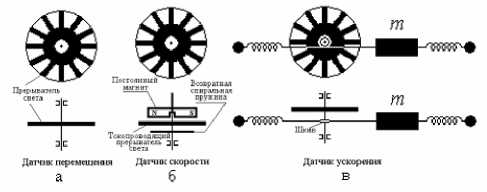
рис. 3. Диаграммы процессов формирования импульсов
Тактовые импульсы формируются в D1.3 логическим перемножением входных сигналов. Переход многофазного генератора D3 в новое состояние осуществляется фронтом тактового импульса (рис .3, вывод 10 D1), что соответствует моменту затемнения одного из фототранзисторов после их одновременного освещения.
D-триггер D2.1 переходит и удерживается в состоянии «1», если движение прерывателя света осуществляется в направлении от VT1 к VT2 (рис. 3, участок t1 – t2).
На рисунке 3 показаны диаграммы формирования импульсов счета (вывод 10 микросхемы D1) и реверса (вывод 1 микросхемы D2) из входных импульсов, сформированных триггером Шмитта. Индексы у напряжений, приведенных на рис.3, показывают номера выводов микросхем, на которых формируются эти напряжения. При смене направления движения триггер D2.1 переходит в состояние «0» и удерживается в нем до следующей смены направления движения (рис. 3, участок t2 – t3).
Его выходное напряжение на прямом выходе Q поступает на управляющие входы логических элементов D5.1 и D5.2 для реверса шагового двигателя.
Триггер D2.2 используется для упрощения управления самописцем. Самописец после ручного возврата в исходное состояние запускается первым же импульсом регистрируемого сигнала.
Конструкция датчиков движения приведена на рис. 4. Датчик перемещения закрепляется на валу кол¸с экспериментальной тележки или, являясь е¸ пятым колесом, сам катится по треку. Магнит датчика скорости закрепляется аналогично. Пружины датчика ускорения закрепляются в направлении движения в любом свободном месте тележки. Светодиоды, фототранзисторы и прерыватели света следует располагать так, чтобы затемнение и засветка фототранзисторов VT1 и VT2 начинались и заканчивались неодновременно.
Примечание. Светодиоды, фототранзисторы и прерыватели света можно применить от компьютерного манипулятора «мышь». Светопрерыватель датчика скорости должен быть наклеен на токопроводящий немагнитный материал (или изготовлен из него) и расположен соосно и как можно ближе к магниту.
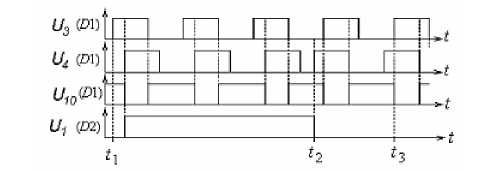
рис. 4. Упрощенная конструкция датчиков движения
