Счисление пути в закрытых помещениях

Автор: Поспелов Алексей Сергеевич
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Диагностика и ремонт
Статья в выпуске: 2 (24), 2013 года.
Бесплатный доступ
В статье рассматривается способ счисления пути мобильного объекта внутри помещения на основе метода инерциальной навигации, а так же способы уменьшения ошибки измерения навигационных данных.
Инерциальная навигация, счисление пути, акселерометры, азимут
Короткий адрес: https://sciup.org/148186082
IDR: 148186082 | УДК: 656.052
Indoor dead reckoning
The article describes a method of reckoning mobile object indoor based on the method inertial navigation and ways to reduce the measurement error of navigation data.
Текст научной статьи Счисление пути в закрытых помещениях
Счисление пути мобильных объектов в закрытых помещениях сейчас является очень актуальной задачей. Так как используемые сейчас для навигации сигналы GPS/ГЛОНАСС в закрытых помещениях недоступны.
Существует множество разных методов счисления пути и позиционирования мобильных объектов в помещении, но все они основываются на вмешательстве в существующую инфраструктуру помещения в котором предполагается навигация. Наиболее многочисленную группу составляют радиочастотные технологии, включая радиочастотные метки – RFID. В отдельную группу можно выделить технологии инфракрасного и ультразвукового позиционирования. Среди радиочастотных технологий можно выделить технологии, изначально предназначенные для оказания услуг связи, так или иначе приспособленные для позиционирования (Wi-Fi, Bluetooth, сотовая связь), и те, которые по физическим свойствам модуляции в наибольшей мере подходят для позиционирования – это CSS (ISO24730-5), UWB, NFER и другие [1].
В данной статье не будем рассматривать вышеизложенные технологии, а остановимся на инерциальной навигации внутри помещения, а под мобильным объектом будем понимать человека.
Главной задачей при счислении пути является определение среднего шага – поскольку длина полного шага не постоянна, а изменяется в зависимости от скорости [2], то есть в процессе ходьбы она должна постоянно уточняться для увеличения точности счисления перемещения.
Фаза переноса
Двуопорный интервал
-<—20%
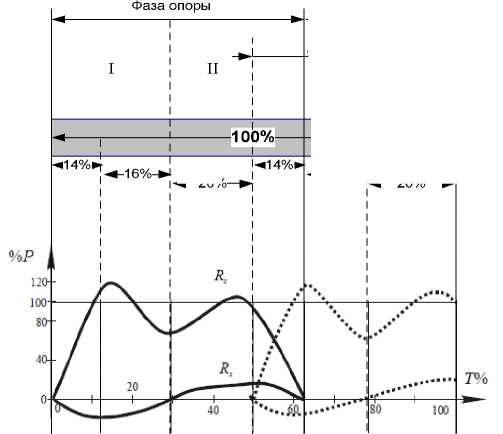
Рисунок 1 . Изменение динамических параметров в течение цикла ходьбы : вертикальная ( Rz ) и продольная ( Rx ) составляющие опорной реакции, в % к массе тела.
Длину шага достаточно точно можно Р определить по формуле Д = — + 0,37 [3], где
Д – длина одного шага в метрах, Р – рост человека в метрах. Более точно длина шага определяется промером какого-нибудь ровного ли- нейного участка местности, например дороги, протяженностью 200 ÷ 300 м, который заранее измеряется мерной лентой (рулеткой, дальномером и т. п.). При приближенном измерении расстояний длину пары шагов принимают равной 1,5 м. Средняя ошибка измерения расстояний шагами в зависимости от условий движения составляет около 2 ÷ 5% пройденного расстояния.
Для точного распознавания факта шага в общем цикле ходьбы человека нам интересны следующие фазы [4], показанные на рисунке 1.
Первая подфаза (0 ÷ 15% цикла) соответствует фазе амортизации. В этой фазе происходит развитие переднего толчка, начинается подъем общего центра масс.
Вторая подфаза – выпрямление ноги (16 – 30% цикла) – наступает спад опорной реакции (в конце фазы обозначается ее минимум), завершается подъем общего центра масс (достигается момент вертикали).
Третья подфаза – наклон голени вперёд (31 ÷ 50% цикла) – развивается задний толчок; общий центр масс начинает опускаться (достигается пик ускорения падения общего центра масс).
Четвертая подфаза – отталкивание ноги от пола (51 ÷ 65%) – вначале происходит разгибание в плюснефаланговом суставе, комбинирующееся с наклоном голени вперёд. Оба перемещения противоположно влияют на положение общего центра масс: первое способствует его повышению, второе – его понижению. В середине этой фазы возникает подошвенное сгибание в голеностопном суставе. Это движение приводит к повышению уровня общего центра масс, которое частично нейтрализуется продолжающимся разгибанием в плюснефалан-говом суставе.
Эти фазы составляют фазу опоры в полном цикле ходьбы человека, которая составляет примерно 60% от цикла двойного шага в среднем темпе.
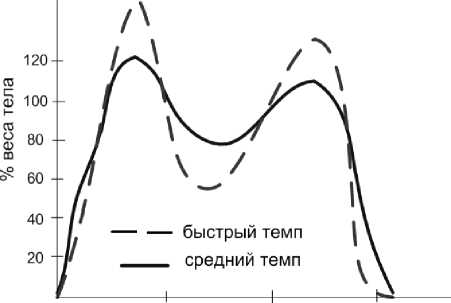
Алгоритм определения шагов заключается в определении двух групп фаз в цикле движения человека. Суть метода состоит в определении этих максимумов см. рис.1 и по ним определения факта шага человека. Следует отметить, что максимумы зависят от темпа ходьбы рис. 2, табл. 1.
Из рисунка 2 понятно, что если выполняются следующие условия:
N max верт = 2 = 2 max{ A ( t Херт } ;
N minверт = 2 = 2 min{ A(t Херт } ?
N max гор = 1 = 2 maX{ A ( t ) гор } ;
N min гор = 1 = 2 Ш1П{ A ( t ) гор } ,
20 40 60
Длительность цикла в %
Рисунок 2. Динамическая функция вертикальной составляющей силы реакции опоры
Таблица 1. Характеристика ходьбы людей в разном темпе
|
Параметры: |
Медленный темп |
Замедленный темп |
Произвольный темп |
Ускорен-ный темп |
Быстры й темп |
|
Средняя скорость (м/с) |
0,61 |
0,91 |
1,43 |
1,9 |
2,28 |
|
Темп (шаг/м ин) |
67,8 |
84,5 |
109,1 |
125,0 |
137,9 |
|
Длина шага (метр) |
0,51 |
0,6 |
0,74 |
0,84 |
0,88 |
-
t max верт_ 1 t min гор
причем , то можно смело
-
t max верт _ 2 t max гор
фиксировать сделанный шаг.
Условно объединим первую и вторую подфазу в первую группу и третью с четвертой во вторую группу, основываясь на том, что внутри этих группах изменение динамических параметров примерно одинаково[5,6] (рисунок 3).
Буквами а, h, g на рисунке 3 обозначено горизонтальное, вертикальное и гравитационное ускорение соответственно.
В настоящее время для вычисления длины шага применяются следующие методы: эмпирические, аппроксимационные, основанные на интегрировании ускорения за пройденный шаг[7]. Если рассмотреть динамику ходьбы человека, показанную на рисунках выше. Одна нога постоянно находится в контакте с землей, а другая перемещается под действием мышц.
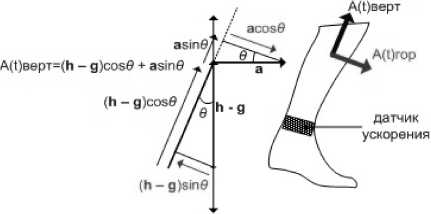
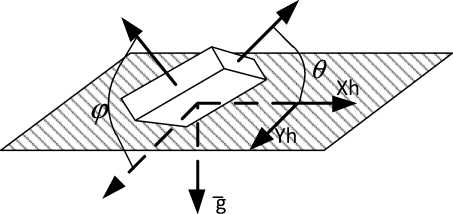
Рисунок 4. Положение трехосевого акселерометра
(h - g)cos6
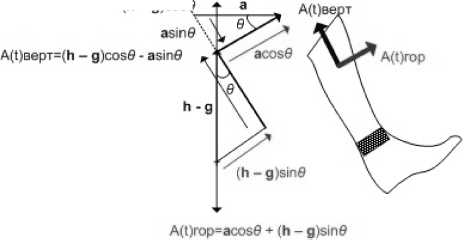
Рисунок 3 . Общее ускорение ноги в течение двух групп фаз с горизонтальной и вертикальной
Ещё один важный параметр – значение голеностопного угла, оно зависит от походки каждого отдельно человека, а так же накладываются погрешности измерения самим акселерометром.
Проблема решается за счет вычисления производной от функции изменения голеностопного угла, нахождения ее максимумов, таким образом, что становится известной общая форма кривой θ( t ). На рисунке 5 представлен график изменения голеностопного угла в течение всего цикла двойного шага.
составляющими
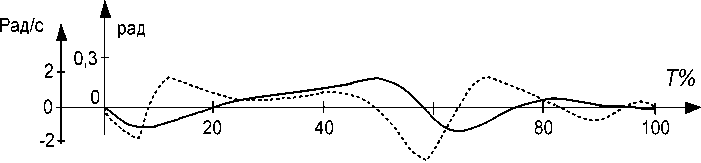
Рисунок 5. Изменение динамической характеристики голеностопного угла ноги (град) и первой производной (рад/с)
Но, прямое интегрирование данных от датчика влечет за собой быстрорастущую со временем ошибку из-за присутствия медленно меняющейся компоненты сигнала, называемой дрейфом нуля. Поэтому для обработки разумно использовать ZUPT-метод [8]. Основной задачей метода является поиск участков, соответствующих состоянию покоя стопы относительно грунта. В моменты отсутствия движения сигналы датчиков близки к уровню шума и могут быть приняты за ноль. Таким образом, в периоды покоя стопы происходит обнуление скорости и ускорения сенсоров, из сигнала удаётся убрать дрейф нуля, что делает результат интегрирования более точным.
Метод детектирования шага можно так же использовать для поднимающегося или спускающегося по лестнице человека [4] (рис.6).
Постоянное отслеживание динамических параметров человека позволит в полной мере детектировать шаг, а так же определить характер движения.
В идеальном случае позиция (x) человека в момент времени (t) может быть определена по его ускорению, двойным его интегрированием:
tt t
x (t) = 11 a (t) dtdt +1
v 0 dt + x 0 ,
где: a – ускорение человека; v – начальная скорость человека; x 0 – начальная позиция.
Так же, для уточнения счисления координат, в инерциальной системе определения координат движущегося человека необходим датчик ускорения, размещенный на поясе.
Проблему погрешности измерения самим акселерометром от части можно решить по способу коррекции тангажа и крена. Необходимо отметить, что погрешности вычисления углов по формулам зависит от погрешностей акселерометров, и они не нарастают со временем.
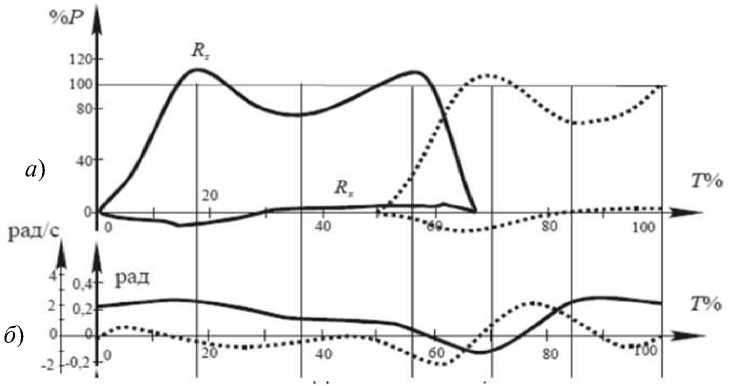
Рисунок 6. Изменение динамических параметров в течение цикла при ходьбе по лестнице вверх : а )– вертикальная ( Rz ) и продольная ( Rx ) составляющие опорной реакции, в % к массе тела; б ) – голеностопный угол правой ноги (град) – сплошная линия и их первые производные (рад/с) –пунктирная линия;
Так же необходимым параметром является направление азимута для его определения воспользуемся формулами проекции ускорений по осям акселерометра на плоскость движения человека (см. рис. 4):
X h = X cos( 0 ) + Y sin( ф )sin( 0 ) - ...
... - Z cos( ф )sin( 0 ); (2)
Y h = Y cos( ф ) + Z sin( ф ), где: ^ - угол крена, 9 - угол тангажа.
В этом случае направление азимута вычисляется так:
Y
Az = arctan--- (3)
X h
Не трудно представить, что:
Az(Y h < 0, X h = 0) = 90 ° ;
Az ( Y h > 0, X h = 0) = 270 ° ;
Az(Y h < 0, X h > 0) = 180 ° - (arctan - Y -) • — ;
Xh
Az(Y h > 0, X h > 0) = 360 ° - (arctan- Y -) • — ;
Xh
Az(Xh < 0) = -(arctan Yh-) • — .
Xh
Применяя приведенные выше методы можно с большой точностью отслеживать перемещение человека в закрытых помещениях, а наиболее вероятная область применения подобных сис- тем это навигация пожарных внутри горящего объекта.
