Сеансно-временной метод автономного управления

Автор: Хартов В.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 (7), 2005 года.
Бесплатный доступ
Рассматриваются проблемы автономного управления космическими аппаратами ретрансляции, связи и навигации в части логического управления бортовыми системами, обеспечивающего выполнение программы работы космического аппарата в течение всего периода автономности. Вводится определение сеансно-временно-го метода автономного управления, позволяющего достигать заданную в программе цель с вероятностью, стремящейся к вероятности сохранения такой технической возможности. Представлен подход к реализации метода бортовыми системами принятия решений продукционного типа, определены требования к моделям автономного управления.
Короткий адрес: https://sciup.org/148175128
IDR: 148175128 | УДК: 519.68
The time-session off-line control method
The off-line control problems of the spacecrafts of communication, retransmission, and navigation in terms of the onboard systems logic control that provides the spacecraft mission fulfillment for the whole period of autonomy are considered. The definitions of the time-session off-line control method that allows reaching the purpose given in the program with such a probability that aspires to the probability of this technical possibility retaining are introduced. The approach to realization of the method of decision-making by the on-board systems in the production type is presented and the requirements to the off-line control models are defined.
Текст научной статьи Сеансно-временной метод автономного управления
В общем случае достижение автономного функционирования космических аппаратов (КА) обеспечивается при автономном решении навигационных задач; решении задач автономного поддержания технического состояния бортовых систем; решении задач автономного управления, обеспечивающего целенаправленное функционирование космического аппарата. Автономное навигационное определение предполагает решение самостоятельного комплекса баллистических задач. Автономное поддержание систем изделия в работоспособном состоянии обеспечивается соответствующими методами автономного контроля и диагностики сложных технических систем. Третья составляющая автономности, которой и посвящена данная статья, - это автономное управление, понимаемое как логическое управление бортовыми системами, обеспечивающее выполнение программы работы космического аппарата в течение всего периода автономности [1].
Анализ показывает, что достижение эффективности автономного управления возможно при использовании метода, обеспечивающего отработку программы, элементами которой являются пары { t , Q }, где Q k - область нахождения вектора выходных параметров в интервале времени от t k до t k+ р т. е. цель управления. Такой метод должен обладать свойствами адаптивности, позволяющими реализовать процедуру достижения цели с учетом текущего реального состояния изделия. Иными словами, при реализации такого метода на борту на каждом шаге управления определяется управляющее воздействие U k :
U k = F ( x ( t k - 1 ), Q k , Z ) .
Тогда, при условии Uke Uд, где Uд - область допустимых управлений, вероятность автономной работы будет стремиться теоретически к единице. На практике вероятность автономной работы определяется количеством функциональных элементов и степенью резервирования в бортовых системах, в связи с чем
P = P (T , T*) oy ZHy 0, , где Pzну - вероятность отсутствия возмущения, не устранимого на области допустимых управлений Uд. При параллельно-последовательной надежностной схеме средств обеспечения сеансов связи неустранимое возмущение Pzну - это отказ всех комплектов одного и более функциональных элементов. Поэтому
n
P oy = П P ( T o , T ) , j = 1
где Р . - вероятность безотказной работы (с учетом резервирования) / го функционального элемента на интервале автономности Т ^ , Т * .
На основании вышеизложенного для космических аппаратов связи и ретрансляции автором определен се-ансно-временной метод автономного управления (СВМ). Сеансно-временной метод - это метод адаптивного автономного управления, позволяющий по задан ным в программе автономного управления параметрам сеансов целевой работы либо параметрам других типо вых циклограмм управления определять и реализовывать управляющие воздействия, обеспечивающие вы полнение программы независимо от текущего состоя ния изделия.
Эффективность использования метода зависит от конкретных особенностей построения бортовых систем космических аппаратов ретрансляции и связи. Так, функциональный элемент при наличии ненагруженного резерва и средств переключения на резерв является элементом с восстановлением. Восстановление функциональ ного элемента происходит с вероятностью х.
При реализации переключателя на централизованных сбоеустойчивых средствах, определяющих работоспособность и живучесть изделия в целом, вероятность безотказной работы переключателя можно условно принять за единицу. В таком случае величина определяется следующим выражением:
Х = P • P ( т <т ),
ДОСТ вост доп , где Рдост - вероятность достоверного определения текущего состояния; твост - время восстановления текущего элемента; тдоп - допустимое время задержки начала сеанса либо допустимое время перерыва.
Время восстановления текущего элемента находится по формуле т = т ,+т +т +т „ . вост об ан выд перех , где то6 - время обнаружения отказа, определяемое периодом контроля; тан - время, затрачиваемое на принятие решения о выдаче управляющего воздействия; твыд - время реализации управляющих воздействий; тперех - время приведения резервного элемента в рабочее состояние.
Достоверность определения текущего состояния определяется достоверностью информации о состоянии параметров бортовых систем. Повышение достовернос ти приводит к увеличению загрузки вычислительных средств, влияющей на время обнаружения отказа, время принятия решения и время реализации управляющих воздействий.
Таким образом, вероятность выполнения интервала автономности для СВМ стремится к вероятности сохранения работоспособного сочетания комплектов при наличии достаточно полной модели управления и обеспечении реализации этой модели с приемлемыми времен ными характеристиками и показателями достоверности.
Кроме того, независимость программы автономной работы от текущего состояния бортовых систем означает возможность закладки на борт КА программ работы с помощью различных независимых источников, не владеющих информацией о текущем состоянии космического аппарата ретрансляции и связи. Таким образом, создается предпосылка для построения систем ретрансляции с децентрализованным доступом абонентов, что резко повышает живучесть системы в целом, увеличивает оперативность доведения до борта заявок на проведение сеансов связи.
При оценке эффективности СВМ интервале времени подготовки к автономному функционированию необходимо учесть, что для СВМ величина интервала подготовки к автономности не включает получение и анализ информации о текущем состоянии объекта управления (ОУ) для ее учета при разработке плана. Величина интервала определяется следующим выражением:
m
Т па = Т прог 1 ^| K пл ,- | i = 1
,
где т*прог - темп закладки программы средствами ВКУ; т - число сеансов в программе; / - величина элемента программы; KПл, - подмножество элементов програм мы, определяющее цель управления, т. е. параметры i-го сеанса,
I K Пл , | = | K реж , | + | K к'онф , |, здесь K Реж , - подмножества элементов программы, определяющие параметры i -го сеанса.
Таким образом, величина периода подготовки к автономности для СВМ определяется только размером элемента программы и количеством элементов программы, необходимых для задания параметров единичного сеанса, и при использовании конкретных технических средств закладки является минимальной.
Принципы реализации сеансно-временного метода. В основе реализации СВМ должна лежать бортовая система принятия решений. Современной тенденцией в этой области является использование экспертных систем (ЭС). В частности, осуществляется разработка таких ЭС, как SICON [2], ЭС для космической станции [3]. Отличитель ной чертой этих проектов является то, что в качестве основы-оболочки ЭС принимаются коммерческие варианты средств построения ЭС: PICON фирмы «LISP Machine Inc.», XCON фирмы «Digital Equipment Corporation». Как правило, эти средства написаны на языке LISP и требуют для своей работы сопроцессоров, которые подключаются к БЦВМ. Другой особенностью, которая, по всей видимости, является следствием первой, является то, что в этих ЭС в качестве параметра управления отсутствует время, несмотря на то что основное внимание уделяется большей реактивности системы.
На основании анализа типичных форм представления знаний в ЭС, таких как логическая модель, модель, основанная на использовании правил (продукционная модель), модель, основанная на использовании фреймов, модель семантической сети и др., автором сделан вывод о том, что наилучшими характеристиками обладает предложенная модель, отличающаяся простотой создания и понимания отдельных правил, простотой пополнения и модификации, а также простотой механизма логического вывода.
Поэтому для принятия в рамках реализации метода бортовыми средствами решений на выдачу управляющих воздействий целесообразно использование продукционных систем [4]. При этом продукционная система PS определяется следующим образом:
PS =< F, P, I >, где F - рабочая память системы (база данных), которая включает значения параметров, характеризующих текущее состояние изделия и соответственно рабочие поля, определяющая состояние продукционной системы; P- база знаний, содержащая множество продукций (правил вида «условие-действие»), образующих модель управления; I - интерпретатор, реализующий процедуры вывода. Продукционная система связана с изделием через средства формирования информации о текущем состоянии изделия и средства выдачи управляющих воздействий на изделия. Интерпретатор выполняет множество правил, которые удовлетворяются на некотором наборе текущих данных и выполняет действия, предусмотренные этими правилами. Так как множество целей является конечным, то аналогично ряду систем [4] поиск решения целесообразно осуществлять в направлении от цели к данным (см. рисунок).
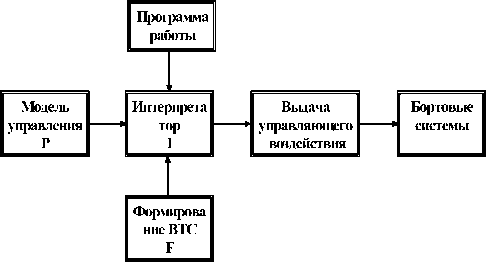
Функциональная схема средств реализации СВМ
Программа работы определяет текущую цель управления; интерпретатор модели управления на основании цели управления и текущего состояния ОУ планирует и реализует процедуру достижения цели в соответствии со знаниями об объекте управления, представленными моделью управления. Для решения задачи такого рода, т е. задачи планирования действий в заранее не полностью известной среде, необходимо разбиение задачи на шаги во времени. Таким образом, модель должна обеспечивать развертывание во времени диаграмм включения и выключения систем, элементов систем и их режимов в соответствии с заданной в программе автономной работы целью управления и текущим (для каждого шага) состоянием изделия.
В связи со спецификой применения бортовой ЭС особые требования предъявляются таким ее элементам, как база знаний, подсистема логического вывода и интерфейс со средой управления. Средства приобретения знаний и объяснения принятых решений в этой ЭС существуют в той степени, которая определяет потребность в их использовании в процессе функционирования космических систем связи и ретрансляции. Но определяющей проблемой, которую необходимо решить для системы, реализующей СВМ, является проблема представления знаний, т. е. представления модели автономного управления. Это объясняется тем, что форма представления знаний оказывает существенное влияние на характеристики и свойства системы, полноту реализации потенциальных возможностей СВМ.
Требования к модели автономного управления. Исходя из особенностей автономного управления спутниками-ретрансляторами, необходимо разработать требования к модели автономного управления, которые должны обеспечить максимальное использование потенциальных возможностей сеансно-временного метода. Часть этих требований к модели автоматически выполняются за счет применения продукционной системы. Это такие факторы, как однородность знаний и простота организации знаний, обусловленная использованием обратного вывода.
Применение модели автономного управления непосредственно на борту КА определяет жесткие требования к объему требуемых вычислительных ресурсов. Одним из методов достижения минимальных информационных затрат является введение в систему команд типовых алгоритмических процедур [6; 7]. При этом запись последовательности обычных машинных команд заменяется на одну новую конструкцию. Оценка сокращения объема программ может быть проведена с использованием метрик Холстеда [5]:
V = N log ( N ) + M log ( M ), где А - количество адресуемых операндов; М- количество используемых типов операндов, при этом А >> М .
Степень сокращения модели при ее представлении с использованием макрокоманд, а не непосредственного программирования, можно оценить по частотным характеристикам типовых процедур.
Обозначим через Р сокращение длины записи одного элемента модели в модели объемом У. при введении соответствующих бортовых структур: Р = У / У.', а через а. - количество записей данного элемента в модели. Тогда сокращение объема модели будет равно dV = £aiV -Vi‘) =^a.(1 -1/P).
Степень сокращения объема модели будет
W = V / V 1 = V /(V - dV ) = 1/(1 - a.) V (1 - 1/ p.)) .
Введя вес элемента в модели, получим выражение
W = 1/(1 - f (1 - 1/ р )) .
Допустив упрощение, заключающееся в принятии средней записи элемента, равного Р , а средний вес в программе Е / . = F , представим выражение (1) в виде
W = 1/(1 - F (1 - 1/ P )) . (1)
Отсюда следует, что минимальный объем памяти, занимаемой моделью автономного управления, будет при F = 1, т. е. при построении всей модели только с применением типовых элементов, и при максимальном значении Р , т. е. при предельно компактных структурах обозначения типовых элементов.
Выполнение элементов возможно как при соответствующем расширении системы команд бортовой вычислительной машины, так и путем применения специальных программ-интерпретаторов. В первом случае отсутствуют дополнительные затраты памяти на построение интерпретатора и уменьшаются затраты машинного времени, но такой подход затруднителен при использовании универсальных вычислительных средств, решающих широкий круг задач. С другой стороны, при А >> М объем памяти, занимаемой интерпретатором, несуществен. Поэтому для работы с моделью автономного управления целесообразно построение бортового интерпретатора.
Специфика современных космических аппаратов ретрансляции и связи обусловливает необходимость представления в модели автономного управления параллельных процессов, имеющих многочисленные асинхронные участки, периодически взаимодействующие друг с другом, Это требует дополнения конструкций продукционных правил управляющими структурами, позволяющими отобразить взаимодействия и взаимоисключения, критические участки по обращению к общим ресурсам и данным.
Принятие решений по управлению должно обеспечиваться в реальном масштабе времени, для чего в конструкциях модели автономного управления должны быть предусмотрены элементы работы со временем.
Таким образом, изложенный в статье подход к определению метода автономного управления и требований к средствам его реализации обеспечил дальнейшую разработку бортовых программных комплексов автономного управления, доказавших свою эффективность при эксплуатации более 10 космических аппаратов из состава российской орбитальной группировки.
