Семейство кривошипно-коромысловых механизмов с максимумом угла передачи при угле поворота кривошипа, равном 300

Автор: Середа Наталья Александровна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.18, 2016 года.
Бесплатный доступ
В работе проведен анализ методов синтеза кривошипно-коромысловых механизмов (ККМ). В развитие метода синтеза, учитывающего характер изменения функции угла передачи ККМ, предложена математическая модель семейства кривошипно-коромысловых механизмов с максимумом функции угла передачи, равным 90о, при угле поворота кривошипа, равном 30о (ККМ-30о). Теоретически установлена область существования ККМ-30о, определяющая условия геометрической проворачиваемости этого семейства механизмов. Приведены примеры практического применения области существования ККМ-30о, зависимостей для угла передачи при анализе геометрических параметров таких механизмов.
Кривошипно-коромысловый механизм, синтез, математическая модель, геометрическая проворачиваемость, параметры
Короткий адрес: https://sciup.org/148204384
IDR: 148204384 | УДК: 621.837.7
Crank-rocker mechanism group with a maximum transmission angle at a crank angle is equal to 30
In work the analysis of methods of synthesis the crank-rocker mechanisms. Developed synthesis method takes into account the nature of the change function of the transmission angle of the crank-rocker mechanisms. The mathematical model of the crank-rocker mechanisms with the maximum of the function of the transmission angle is 90°, when the angle of the crank rotation is 30º. Theoretical established the realm of existence of such mechanisms. This realm of existence identify the conditions of geometric steer this group of mechanisms. Examples of the practical application of the realm of existence for the analysis of geometrical parameters obtained groups of mechanisms.
Текст научной статьи Семейство кривошипно-коромысловых механизмов с максимумом угла передачи при угле поворота кривошипа, равном 300
Кинематические схемы многих технологиче- ских машин содержат кривошипно-коромыс-ловые механизмы (ККМ). Применительно к линиям пищевых производств приведем примеры технологических машин, кинематические схемы которых включают названный механизм: устройства для передачи изделий [1], укладочные машины [2], тестомесильные машины [3, с. 34]. Известны графоаналитические методы синтеза ККМ [4, 5, с. 238–248; 3, с. 75–84]. Эти методы позволяют проектировать названный механизм по исходным данным: по заданному ходу и углу качания коромысла; по коэффициенту увеличе-ния средней скорости коромысла при этом вводится дополнительное условие – угол передачи не опускается ниже минимально допустимых его значений; по заданным двум или трем положениям ведущего и ведомого звеньев. Графоаналитические методы синтеза ККМ не дают информации о характере изменения функции угла передачи этих механизмов в периоде кинематического цикла.
Известен метод синтеза ККМ, позволяющий определять геометрические параметры, используя область существования этих механизмов и расчетные формулы. Область существования геометрически проворачивающихся ККМ предложена Н.И. Колчиным [6, стр. 86]. Математическая модель названной области описывается тремя равенствами
1 - λ1 = λ2 - λ31 - λ1 = λ3 - λ21 + λ1 = λ2 + λ3,
В первой четверти прямоугольной системы координат с осями λ 2 и λ 3 математическая модель, описываемая равенствами (1) – (3), представляет собой три прямые линии. В той же системе координат условие геометрической проворачиваемости с учетом углов передачи ККМ – два эллипса [6].
Известен метод синтеза ККМ, позволяющий согласовать характер изменения функции угла передачи в периоде кинематического цикла с характером изменения технологической нагрузки, приложенной к механизму [7]. Этот метод основан на делении ККМ на семейства по признаку: положению механизма, в котором наблюдается максимум функции угла передачи, равный 90о. Так, максимум функции угла передачи семейств ККМ наблюдается в наиболее характерных положениях:
-
1) продольная ось кривошипа перпендикулярна линии центров (ККМ-1);
-
2) продольная ось кривошипа – продолжение линии центров (ККМ-2);
-
3) продольная ось кривошипа лежит на линии центров (ККМ-3);
-
4) продольная ось шатуна наложена на кривошип; 5) продольные оси кривошипа и шатуна вытянуты в одну линию (ККМ-5);
-
6) продольные оси кривошипа и коромысла параллельны, при этом названные звенья лежат по одну сторону от линии центров (ККМ-6);
-
7) продольные оси кривошипа и коромысла параллельны, при этом упомянутые звенья лежат по разные стороны от линии центров (ККМ-7).
В развитие метода синтеза, учитывающего характер изменения функции угла передачи ККМ, выделим еще одно семейство таких механизмов. Для этого семейства механизмов характерно, что максимум угла передачи, равный 90о, наблюдается в положении КММ при ф = 30°, где ф - угол поворота кривошипа. Отсчет угла ϕ принят от положения, при котором кривошип лежит на линии центров в направлении против часовой стрелки. Обозначим условно это семейство кривошипно-коромысловых механизмов – ККМ-30о. На рис. 1 представлен ККМ в положениях, когда функция угла передачи максимальна µmax = 90о и мини- мальна µmin . Обозначим l1, l2 и l3 – длины кривошипа, шатуна и коромысла соответственно; l0 – длина межцентрового расстояния.
Из произвольного треугольника AOO 1 для q = AO 1 имеем
-
11 +10 - 2 ■ 1, ■ 10 ■ cos(30*) = q2
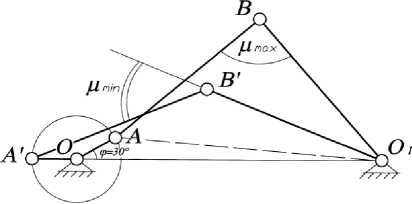
Рис. 1. ККМ в положениях, когда угол передачи максимален и минимален
Из прямоугольного треугольника ABO 1 для q получим 22 2
-
l 2 + l 3 = q . (5)
Совместно решим (4) и (5)
X2+X3 = X1 ■ (X1 - 73;+1
,
где X = , Л 2 = l2
l0 l0
и X2 = — - относительные длины l0
кривошипа, шатуна и коромысла соответственно.
В первой четверти прямоугольной системы координат с осями X2 и Х3 математическая модель (6) - дуга окружности произвольного радиуса
R = VX • (X - D) +1, при этом центр дуг окружностей – в начале системы координат. Выразим из 1 + X = X + X длины X2 и хз , подставим их в (6) и получим два уравнения
X
— X 3 • ( X 1 + 1) + X •
X2 - Х2 • (Х1 + 1) + Х1 •

У 2 7
= 0
Корни уравнений (7) и (8) равны
X 1 + 1 у/X — 2 • X • (1 + 33 ) + 1
X =± 3 2 2
;
x + 1 , V X - 2 • х ■ (1 + х) + + 1
X =---±----------------
2 2 2
Из (9) и (10) видно, что эти уравнения имеют один корень, если х2 - 2 • х1 • (1+4з)+1=о
.
При этом X 1 = 0,1896 ; X 2 = Х 3 = 0,5948 . Следовательно, относительную длину кривошипа семейства ККМ-30о можно варьировать в пределах от 0 до 0,1896.
Таблица 1. Координаты точек пересечения математической модели ККМ-30о с прямой Н.И. Колчина
|
Длина X 1 |
Длина X 2 |
Длина Х 3 |
|
0,05 |
0,9520 0,0980 |
0,0980 0,9520 |
|
0,10 |
0,8904 0,2096 |
0,2096 0,8904 |
|
0,15 |
0,8002 0,3498 |
0,3498 0,8002 |
|
0,1896 |
0,5948 |
0,5948 |
Получим координаты точек пересечения математической модели (6) ККМ-30о с прямой (3) Н.И. Колчина (см. табл. 1).
По координатам, приведенным в табл. 1, построена область существования ККМ-30о. Область существования ККМ-30о, определяющая условия геометрической проворачиваемости этого семейства механизмов, представлена на рис. 2. Эта область – сочетание дуги abc окружности единичного радиуса R = 1 (при X 1 = 0 ) и кривой cda , полученной путем пересечения дуг окружностей произвольного радиуса R = V X • ( X - 31 ) + 1 (при 0 < X 1 < 0,1896 ) с прямой (3) Н.И. Колчина.
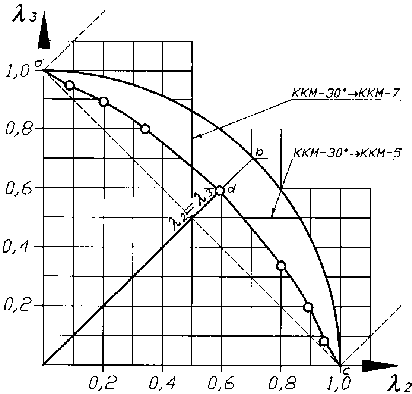
Рис. 2. Область существования семейства ККМ-30о
Точки, лежащие на кривой cda , соответствуют ККМ-30˚ с минимальным углом передачи, равным 0о. При этом якобиан исходной системы двух уравнений анализа ККМ равен нулю. Таким образом, точки, принадлежащие кривой cda , соответствуют ККМ-30о, имеющим в периоде кинематического цикла особое (мертвое) положение. Точки на дуге abc соответствуют механизмам с параметром X 1 = 0 . Механизмы семейства ККМ-30о вне области abcd не существуют. Совместный анализ математической модели ККМ-30о и математических моделей известных [7] механизмов ККМ-5 и ККМ-7 позволил установить:
-
1) при Х 3 = 0,5 = const , х + X = у- математическая модель ККМ-30о соответствует ККМ-5. В этом случае максимум функции угла передачи наблюдается в двух положениях названного механизма: при ф = 30 ° , что соответствует положению, когда продольные оси кривошипа и шатуна вытянуты в одну линию (ККМ-5) и при ф = 330 ° ;
-
2) при Х 2 = 0,5 = const , X + X = математиче
ская модель ККМ-30о соответствует ККМ-7. В этом случае максимум функции угла передачи наблюдается в двух положениях названного механизма: при ф = 30 ° и при ф = 330 ° , что соотносится с положением, когда продольные оси кривошипа и коромысла параллельны, причем кривошип и коромысло лежат по разные стороны от линии центров (ККМ-7).
Приведем примеры практического применения области существования ККМ-30о (рис. 2).
-
1. Выбираем в области по рис. 2 точку, устанавливаем ее координаты: A = 0,70 и A 3 = 0,60 . По (6) рассчитываем относительную длину кривошипа A = 0,09 . Задаемся длиной межцентрового расстояния и определяем размеры звеньев ККМ-30о в миллиметрах.
-
2. Пусть A = 0,146 . Примем A 2 = A 3 . По (6) имеем, что A 2 = A 3 = 0,620 . Конструктивно выбираем
длину кривошипа и устанавливаем размеры звеньев ККМ-30˚ в миллиметрах. Силовая работоспособность ККМ оценивается функцией угла передачи, которая изменяется в периоде кинематического цикла в зависимости от значений длин звеньев. Для выделенного семейства ККМ-30о получим зависимости для угла передачи. Из рис. 1 видно, что угол передачи семейства ККМ-30о в функции угла поворота кривошипа ф со- ставит
(
A i •
A i
= arccos
cos( фi ) — у
A • A v 7. (12)
По зависимости (12) установлен характер изменения функции угла передачи семейства ККМ-30о. Функция угла передачи этого семейства механизмов сохраняет значения, близкие к 90о, на одной трети интервала рабочего хода и к концу рабочего хода снижается, не достигая минимума. Минимум функции угла передачи наблюдается в положении механизма, когда продольная ось кривошипа – продолжение линии цен- тров, то есть при фt =180о. Представим минимальный угол передачи ККМ-30о в функции трех аргументов – относительных длин Ai, A2 и Аз
A
( Г
A i • 1
A min
= arccos
A 2
+ —
• А з
v 7 . (13)
При условии, что длины A2 = A3, минимальный угол передачи составит
2 • A i • 1 + —
A min = arccos
V 7 . (14)
Анализ выражения (14) показал, что с увеличе- нием длины Ai значения угла Amin уменьшаются, при Ai = 0,1896 угол Amin = 0о. Для решения практических задач проектирования ККМ-30о получим зависимости для минимального угла передачи в функции двух аргументов ^min = f( Ai, A3) и Amin = Ф( Ai,A2> соответственно
A i •
i + —
л
A min = arccos
A 3 ■ д/ A i ■ (A i - V 3) - A 2 + i
V 7.
;
A i •
i + —
A
A min = arccos
A 2 • V A i • ( A i - V 3) - A 2 + 1
V 7 . (16)
На рис. 3 приведены графики угла передачи
A min , полученные по зависимости (16).
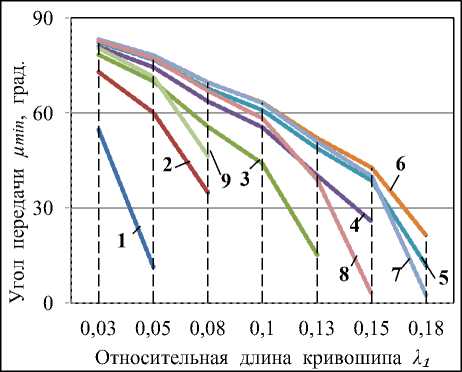
Рис. 3. Минимальный угол передачи в функции
A i при A 2 = const:
1 - A 2 = 0,i0 ; 2 - A 2 = 0,20 ; 3 - A = 0,30 ; 4 - A 2 = 0,40 ; 5 - A 2 = 0,50 ; 6 - A 2 = 0,60 ; 7 - A 2 = 0,70 ; 8 - A 2 = 0,80 ; 9 - A 2 = 0,90
Из выражений (15) и (16) следует, что влияние длин A 2 и A 3 на угол передачи A min симметрично. Анализ графической интерпретации на рис. 3 позволил заключить: 1) с увеличением длины A i при у = const угол A mtn уменьшается; 2) с повышением A 2 при A i = const угол A min увеличивается до определенного значения, а затем снижается (при больших значениях A 2 ).
Приведем примеры практического применения зависимостей (13) – (16) и графической интерпретации (рис. 3) для семейства ККМ-30о.
-
1. Определить значение минимального угла передачи для семейства ККМ-30о, если известны относительные длины звеньев: A = 0,70 и A = 0,09 . По зависимости (16) получим, что A min = 66 ° 2 . Аналогичный результат можно получить по кривой 7, приведенной на рис. 3.
-
2. Спроектировать ККМ-30о, в котором при относительной длине шатуна A = 0,90 минимальный угол передачи должен быть не меньше 40о. На рис. 3 выбираем кривую 9, эта кривая построена при A = 0,90 . Видим, что условие Aiп - 40 ° выполняется при A = 0,08 . По зависимости (6) определяем относительную длину коромысла. Имеем A 3 = 0,24 . Зная длины A i , A 2 и A 3 , по зависимости (13) уточняем фактическое значение минимального угла передачи. Угол передачи A min = 46 ° i6 , что удовлетворяет условию числового примера.
Выводы: в результате теоретических исследований для семейства ККМ-30о установлены следующие закономерности:
-
1. Область существования ККМ-30о, определяющая условия геометрической проворачиваемости этого семейства механизмов – сочетание дуги окружности единичного радиуса R=1 (при Я , = 0 ) и кривой, полученной путем пересечения дуг окружностей произвольного радиуса R = ^ Я • ( Я — 3) + 1 (при 0 < Я - 0,1896 ) с прямой (3) Н.И. Колчина.
-
2. ККМ-30о, геометрические параметры которых принадлежат кривой, полученной путем пересечения дуг окружностей произвольного радиуса R = V Я , • ( Я , - 33 ) + 1 (при 0 < Я - 0,1896 ) с известной прямой Н.И. Колчина – это семейства механизмов ККМ-30о с минимальным углом передачи, равным 0о.
-
3. Области соответствия математической модели (6) семейства ККМ-30о моделям известных семейств ККМ-5 и ККМ-7 – прямые линии, параллельные оси абсцисс Я и оси ординат Я соответственно.
-
4. Минимальный угол передачи семейства ККМ-30о с увеличением относительной длины кривошипа Я при постоянной длине шатуна Я 2 (или длине коромысла Я 3 ) уменьшается; при постоянном значении относительной длины Я 1 с увеличением длины Я 2 (или Я 3 ) этот угол повышается до определенного значения, а затем снижается.
-
5. В практическом плане семейство ККМ-30о более предпочтительно для применения в составе машин с возвратно-поворотным движением рабочего органа, технологическая нагрузка которых изменяется в интервале рабочего хода по комбинированному закону, сочетающему приближенно постоянный характер изменения нагрузки в начале (на одной трети интервала) рабочего хода и уменьшающийся к концу интервала рабочего хода.
Список литературы Семейство кривошипно-коромысловых механизмов с максимумом угла передачи при угле поворота кривошипа, равном 300
- Манипулятор для передачи изделий/А.С. Горлатов, Н.А. Середа: пат. 2390406 Рос. Федерация. № 2008150307/02; заявл. 18.12.2008; опубл. 27.05.2010. Бюл. № 15. -8 с.
- Устройство для послойной укладки штучных изделий/А.С. Горлатов, Е.Г. Фетисова, Н.А. Гончарова: Рос. Федерация. № 98113346/13; заявл. 16.07.1998; опубл. 20.06.2000; Бюл. № 17. -10 c.
- Марголин, Ш.Ф. Теория механизмов и машин: теория, примеры, графические работы. -Минск: Вышэйшая школа, 1968. 375 с.
- Артоболевский, И.И. Синтез плоских механизмов/И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов. -М.: Государств. издательство физико-математич. литературы, 1959. 1084 с.
- Артоболевский, С.И. Теория механизмов и машин. -М.: Высшая школа, 1968. 366 с.
- Колчин, Н.И. Механика машин: в 2-х т. -М-л.: Машгиз, 1963. Т.1. -550 с.
- Горлатов, А.С. Семь групп шарнирных четырехзвенных механизмов: геометрическая проворачиваемость и угол передачи/А.С. Горлатов, Н.А. Середа, Ю.А. Фатыхов//Справочник. Инженерный журнал с приложением. 2016. № 2. С. 19-26.
