Сервисные платформы систем БЛА сельскохозяйственного назначения

Автор: Беляева Ю.А., Королев В.А., Польский В.А.
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 2 (70), 2025 года.
Бесплатный доступ
Активный интерес к применению систем БЛА в агропроизводстве вызван высокой точностью, оперативностью получения и анализа информации о реализуемых операциях на каждом их этапе в любой зоне реализации агротехнологий, широкой вариативностью использования, возможностью корректировки агропроцессов при несоответствии их характеристик регламентируемым технологическим картам непосредственно в ходе реализации агротехнологий, манёвренностью перемещения по сложным траекториям и т.п. Бесперебойную работу и автоматизированное сервисное обслуживания систем БЛА обеспечивают автономные обслуживающие посадочные платформы (АОПП). Выполнен анализ научно-практического задела по платформам систем БЛА различного применения с целью оценки возможности использования его в системах сельскохозяйственного назначения. Сформулированы требования к АОПП систем БЛА сельскохозяйственного назначения, предложения по структуре платформ и реализациям их компонентов. Для точного позиционирования БЛА на платформе наиболее полно техникоэкономическим требованиям удовлетворяют активные устройства позиционирования с прямыми параллельными толкателями, расположенные на небольшом возвышении относительно посадочной поверхности. Для пополнения энергоресурсов АОПП непосредственно на территории функционирования перспективной является резонансная однопроводниковая система электроснабжения. Проработан эскиз платформы системы БЛА для наблюдения за территориями и контроля хода агротехнологических процессов. Разработка проектов многофункциональных высокоманёвренных модулей систем БЛА, обеспечивающих выполнение поисково-преобразовательных и исполнительных агротехнологических функций в условиях ведения точного аграрного производства на пространственно-распределённых территориях, позволит эффективно решать задачи цифровой трансформации сельского хозяйства с привлечением информационно-интеллектуальных ресурсов.
Агротехнологические функции, система беспилотных летательных аппаратов сельскохозяйственного назначения, автономная обслуживающая посадочная платформа, устройство позиционирования, система восстановления аккумулятора
Короткий адрес: https://sciup.org/140312746
IDR: 140312746 | УДК: 631.1 | DOI: 10.55618/20756704_2025_18_2_41-53
Service platforms for agricultural UAV systems
Active interest in the use of unmanned aerial vehicle (UAV) systems in agricultural produc-tion is caused by high accuracy, efficiency of obtaining and analyzing information about the operations be-ing implemented at each stage in any zone of implementation of agricultural technologies, wide variability of use, the possibility of adjusting agricultural processes in case of inconsistency of their characteristics regulated by technological maps directly in the course of the implementation of agricultural technologies, maneuverability of movement along complex trajectories, etc. Uninterrupted operation and automated maintenance of UAV systems are provided by autonomous service landing platforms (ASLP). An analysis of the scientific and practical groundwork for platforms of UAV systems of various applications is carried out in order to assess the possibility of using its agricultural systems. The requirements for the ASLP of agricul-tural UAV systems, proposals for the structure of platforms and the implementation of their components are formulated. For accurate positioning of UAVs on the platform, active positioning devices with straight paral-lel pushers, located at a slight elevation relative to the landing surface, most fully meet the technical and economic requirements. To replenish the energy resources of the ASLP directly in the territory of operation, a resonant single-conductor power supply system is promising. A sketch of the platform of the UAV system for monitoring territories and monitoring the progress of agro-technological processes has been worked out. The development of projects of multifunctional highly maneuverable modules of UAV systems, ensur-ing the performance of search and transformation and executive agrotechnological functions in the condi-tions of precision agricultural production in spatially distributed territories, will effectively solve the problems of digital transformation of agriculture with the involvement of information and intellectual resources.
Текст научной статьи Сервисные платформы систем БЛА сельскохозяйственного назначения
Введение. Отличительная особенность сельскохозяйственных объектов, выводящая их в отдельный класс, – крупномасштабность с точки зрения занимаемых площадей, разнообразия и распределения во времени выполняемых технологических операций, взаимодействие с самоорганизующимся объектом аграрного производства, саморегулирующейся техногенной частью агротехноценоза в постоянно меняющихся условиях окружающей среды [1, 2]. Мероприятия оперативного реагирования на постоянные трансформации окруже- ния, нештатные изменения объекта аграрного производства в ходе реализаций агротехнологий обеспечивают специальные автоматизированные исполнительные устройства и средства механизации. В рамках современной концепции точного землепользования и животноводства одним из направлений, внедряющимся при решении подобных задач, становится применение систем беспилотных летательных аппаратов (БЛА).
Активный интерес к применению систем БЛА в агропроизводстве вызван высокой точностью, оперативностью по- лучения и анализа информации о реализуемых операциях на каждом их этапе в любой зоне реализации агротехнологий, широкой вариативностью использования, возможностью корректировки агропроцессов при несоответствии их характеристик регламентируемым технологическими картами непосредственно в ходе реализации агротехнологий, манёвренностью перемещения по сложным траекториям и т.п. Это направление динамично развивается, расширяя круг решаемых задач и показывая свою эффективность [3–5].
Анализ существующих в данной области решений свидетельствует, что значительную часть беспилотных устройств реализуют на основе мультиро-торных аппаратов вертикального взлёта и посадки [6–8]. Задачи мониторинга и картографирования сельхозугодий решают с помощью коптеров с подъёмной силой, достаточной для работы с видеокамерами, дальномерами, сканерами. Такие БЛА обладают радиусом действия 30–50 км, способны периодическим облётом контролировать одним аппаратом территории большой площади, нести комплект необходимого оборудования. Гекса- и октокоптеры имеют более массивную конструкцию, большую снаряжённую массу и способны поднимать в воздух значительную полезную нагрузку [9, 10].
К сожалению, дальность хода и автономность работы коптера ограничена запасом энергии на его борту. Автоматизация процесса восстановления энергоресурсов в районе решения целевых задач увеличит длительность функционирования, позволит расширить объем решаемых задач в автономной миссии каждого БЛА и системы в целом. Для обеспечения бесперебойной работы и автоматизированного сервисного обслуживания в составе систем БЛА необходимы автономные обслуживающие посадочные платформы (АОПП) (стационарные и передвижные, в частности, са-модвижущиеся) [11, 12]. Кроме указанных функций, АОПП осуществляют обеспечение коптеров расходными материалами, замену рабочих органов, операции воздействия на объект аграрного производства, другие действия. Беспилотный летательный аппарат, агрегатируясь с различным навесным оборудованием, является эффективным дополнением к наземным механизированным комплексам. При функционировании в составе гетерогенных систем спектр функций АОПП существенно шире [13].
Цель работы – рассмотрение возможности применения существующих технических решений по системам БЛА различного назначения в реализациях агротехнологий.
Материалы и методы исследования. К настоящему времени сформирован значительный научно-практический задел по применению систем БЛА в различных сферах действия человека. Однако простой перенос известных технических решений в агропроизводство не всегда возможен. В большинстве случаев здесь необходимы дополнительные анализ и доработка.
В сфере агропроизводства спектр использования систем БЛА включает:
-
1) создание и обновление электронных карт возделываемых земель и пастбищ, учёт сельскохозяйственных угодий,
-
2) наблюдение за территориями, экологический мониторинг, создание и корректировка планов и электронных карт возделываемых земель и пастбищ, их учёт, охрана и оценка готовности к реализации агротехнологий;
-
3) оперативный контроль объёма и качества реализации сельскохозяйственных работ по производственным участкам (выявление болезней растений и животных, оценка всхожести, состояния и развития агрокультур, слежение за стадом и учёт животных на пастбищах, забор проб почвы, растений, доставка их для анализа и др.) на любом этапе выполнения и т.п.;
-
4) сбор данных для проработки прогнозов, корректировки планов проведения технологических операций в реальных условиях аграрного производства в целом и по производственным участкам;
-
5) оперативная реализация не предусмотренных технологическими картами операций локальных воздействий на агропроцессы при несоответствии параметров заданным технологическими картами и др.
Уникальные особенности БЛА определяют их исполнительно-преобразовательные системы для взятия проб грунта, фрагментов растений, лазернооптического, электрофизического и биохимического воздействий на растения и животных для предотвращения негативных тенденций при производстве агропродукции, стимуляции положительных эффектов, сигнального группового и индивидуального управления биообъектами. Оригинальные способности БЛА предполагают распознавание анатомоморфологических и этологических характеристик живых развивающихся биообъектов, своевременное обнаружение локально детерминированных зон поведения животных, зарождения инфекций, появления вредителей, инородных или пропавших биообъектов.
БЛА могут осуществлять точечновыборочные агротехнологические меро- приятия и перейти, используя при этом реальные данные контроля реальных физиологических и поведенческих характеристик особей объекта аграрного производства, к технологии упреждающего управления агропроцессами. По сравнению с наземной техникой использование БЛА исключает прямой контакт с почвой и её уплотнение, они более манёврены, быстро перемещаются по сложным траекториям при функционировании на больших площадях.
Функционирование систем БЛА обеспечивает специальное оборудование, в состав которого входят АОПП. Использование данных платформ в зоне решения целевых задач БЛА позволит успешно решать различные вопросы [11, 12]:
-
1) увеличение автономности функционирования и числа одновременно находящихся в автономной миссии ко-птеров:
-
2) замена разряженного аккумулятора резервными заряженными аккумуляторами. Недостаток: сложность реализации системы замены батареи, преимущество: быстрота;
-
3) подзарядка аккумулятора непосредственно на коптере. Недостаток: время подзарядки может составить нескольких часов, преимущество: простота реализации;
-
4) замена рабочих органов, реализующих технологические операции, пополнение технологических ресурсов (удобрения, средства борьбы с вредителями и болезнями растений и др.);
-
5) выгрузка полученных информационных данных, очистка памяти (исследовательская деятельность);
-
6) доставка, перемещение, временное хранение грузов;
-
7) защита БЛА при неблагоприятных погодных условиях (сильный ветер, дождь, снег и т.п.), при ожидании ремонта, между выполнением технологических операций и др.
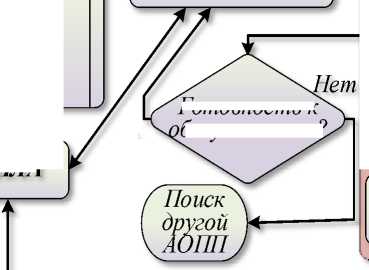
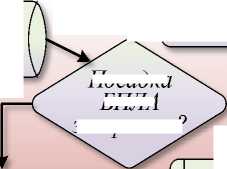
Результаты исследования и их обсуждение. Взаимодействие БЛА с АОПП. При снижении заряда аккумулятора, необходимости пополнения технологических ресурсов, завершении полётного задания, в нештатных ситуациях БЛА запрашивает разрешение на посадку. Для точной посадки БЛА на стыковочную базу АОПП система управления формирует подчинённым устройствам (рисунок 1) задания для выполнения операции. Коммуникационная система устанавливает текущие координаты БЛА и местоположения АОПП, длительность полёта к платформам, их готовность к работе, вид обслуживания, остаточный заряд аккумулятора БЛА и т.п. Распознавание шаблонных моделей БЛА, анализ окружающей среды, оценку положения и ориентацию коптера в пространстве при приближении к выбранной посадочной площадке обеспечивают ресурсы бортовых вычислительных устройств, при необходимости – с поддержкой средств глобальной навигации.
После подтверждения возможности обслуживания БЛА система контроля взлёта/посадки осуществляет его приземление на выбранную АОПП. Для посадки коптер средствами технического зрения идентифицирует метку зоны приземления на платформе. После посадки БЛА размещают и фиксируют на АОПП в позиции, обеспечивающей корректную работу устройств загрузки/разгрузки, за-мены/установки рабочих органов, сопряжение контактов аккумулятора на копте-ре и системы подзарядки на платформе и др. Устройства, используемые для приземления БЛА, функционируют и при взлёте.
Система управления

АОПП
С^тксй^^
Текущие координаты БПЛА и АОПП, время полёта к АОПП, её готовность к работе, вид обслуживания, заряд
БПЛА
Коммуникационная система
Готовность к
Да
бслуживанию?
Да
Внешние данные
Посадка
БПЛА
Нет
Обслуживание
Выгрузка инфОрмационных данных
Система фиксации и блокировки БПЛА
завершена?
Подзарядка аккумулятора
.
..
Перемещение грузов
Рисунок 1 – Функциональная модель взаимодействия БЛА с АОПП Figure 1 – Functional model of interaction between UAV and ASLP
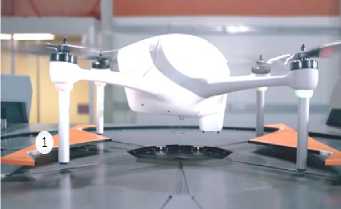
Компоненты АОПП систем БЛА . Наиболее просты в реализации АОПП без устройств позиционирования. В таких схемах площадь посадочной зоны БЛА больше площади контактных баз копте-ров (рисунок 2 а ). Недостатками таких платформ являются сложность точного позиционирования БЛА, удержание его необходимое время в нужном положении, использование исключительно бесконтактного способа зарядки аккумуляторов.
По виду устройств позиционирования АОПП делят на несколько типов [ icles/521948/]:
-
1) с активными устройствами по-
зиционирования. Комплектуются специ- ции: альными приспособлениями (толкатели,

а a б b
в с
манипуляторы), работающими синхронно и смещающими БЛА за опоры в требуемую зону позиционирования. Возможно комплектование толкателей элементами крепления и электрическими контактами: – одна или две пары параллельных толкателей (рисунок 2 б ). Наиболее популярны из-за простоты при реализации;
– фигурные толкатели V- или W-образной формы (рисунок 2 в ). Число толкателей минимизировано, относительно проста и универсальна реализация, высокая точность позиционирования;
– поворотные толкатели, располагаемые по углам либо в центре посадочной площадки (рисунок 2 г ). Сложны в реализа-

г d д e a – беспроводная зарядная подставка ф. WiBotic (США); б – платформа ф. COEX; в – платформа ф. Airobotics; г – платформа ф. Easy Aerial; д – платформа ф. Sunflower; е – механизм спуска/подъёма с электроприводом (FP 1-13)
Рисунок 2 – Виды устройств позиционирования на АОПП

е f
a – wireless charging stand by WiBotic (USA); b – platform by COEX; c – platform by Airobotics; d – platform by Easy Aerial; e – platform by Sunflower; f – descent/ascent mechanism with electric drive (FP 1-13) Figure 2 – Types of positioning devices on the ASLP
-
2) с пассивными устройствами позиционирования: воронки, конусовидные поверхности, скосы, срезы, наклоны, сложные замкнутые контуры (рисунок 2 д ). Использован принцип «бросания»: на последнем этапе, когда пропеллеры БЛА перестают вращаться, коптер позиционируется под действием силы тяжести. Преимущества: высокая надёжность и простота исполнения; недостатки: низкая защищённость от внешних воздействий (при наклоне платформы правильное позиционирование БЛА обеспечивается не всегда), усложнены устройства фиксации и подключения к системе подзарядки, невысокая универсальность оборудования платформы (профиль, габаритные размеры и расположение опор у большинства моделей БЛА разные). Необходим индивидуальный подбор или настройка пассивного устройства позиционирования для различных видов ко-птеров;
-
3) с комбинацией устройств позиционирования. На посадочной площадке последовательно смонтированы пассивные и активные устройства позиционирования, например, воронки, в которых размещены диафрагмы с регулируемым углом наклона и дополнительным толкателем;
-
4) с нестандартными устройствами позиционирования: приземление на провод ЛЭП и др.
При наличии на обслуживаемой территории коммуникаций линий электроснабжения, связи и т.п. целесообразно при возможности размещать АОПП на элементах конструкции, например, опорах этих линий.
Ряд факторов (погодные условия, ошибки навигации, вихревые потоки воздуха от винтов при движении БЛА или др.) усложняют процессы посадки и взлёта. При посадке возможны ошибки позиционирования, несогласованность (неправильное расположение) контактов (передающих и приёмных катушек) зарядных устройств и, как следствие, увеличение продолжительности и низкий КПД процедуры подзарядки аккумуляторов. Более продвинутые структуры при определении местоположения и достижении высокой точности посадки БЛА используют процедуры автоматического выравнивания траекторий, специальные технологии обработки изображений, внешние датчики и др. При этом негативное влияние факторов, влияющих на точность посадки и фиксации БЛА на ОАПП, может быть снижено.
Для обеспечения защиты БЛА от воздействий внешней среды (дождь, град, снег, штормовой ветер и т.п.) платформу оснащают раскрывающимся/за-крывающимся защитным кожухом . Как правило, одна АОПП обслуживает группу БЛА. Размеры защитного кожуха и самой платформы должны обеспечивать укрытие и хранение нескольких БЛА.
В состав универсальных АОПП входит отсек полезной нагрузки : технологические расходные материалы (удобрения, препараты лечения болезней растений и животных и т.п.), сменные рабочие органы, контрольные пробы почвы, растений и т.д.
Сложные взаимодействия с БЛА (загрузка/выгрузка расходных материалов и т.п., зарядка аккумуляторных батарей и др.) обуславливают наличие на АОПП манипулятора перемещения гру зов и установки/замены/изъятия рабочих органов (исполнительных устройств) на БЛА и, при необходимости, механизма спуска/подъёма (рисунок 2 е ).
Анализ рыночных предложений по подъёмным платформам с электропри- водом и площадкой нужного размера показал, что их технические характеристики для сельскохозяйственных применений избыточны: собственная масса, грузоподъёмность завышены, мобильность недостаточна. Необходима разработка механизма спуска/подъёма непосредственно для станции обслуживания систем БЛА сельхозназначения.
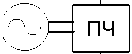
Система восстановления аккумулятора (заряд аккумулятора: контактные и бесконтактные устройства, его замена) обеспечивает длительную работу БЛА непосредственно на территории функционирования перспективной является резонансная система электроснабжения (передача электроэнергии на повышенной частоте) (рисунок 3). В этой системе реализуется нетрадиционный метод передачи электроэнергии по одному проводу практически без потерь. Достоинства системы: высокие КПД, надёжность и ресурс, снижение массы габаритов линии (малое сечение однопроводникового кабеля), минимизация опасных последствий при повреждении или обрыве ли- до окончания ресурсов платформы [12]. нии электропередачи [14, 15]. Для пополнения энергоресурсов АОПП
r 1
~50 Гц
i 1
C 1
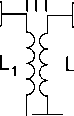
r 0,1 - 100 кГц rл ОВЛ ТП
C л
r 2
~50 Гц


ПЧ- преобразователь частоты; ТП – резонансный высокочастотный трансформатор Тесла, ОВЛ – однопроводниковая линия
Рисунок 3 – Резонансная система передачи электроэнергии
FC – frequency converter; TP – Tesla resonant high-frequency transformer;
OVL – single-wire line
-
Figure 3 – Resonant power transmission system
Бортовой программный модуль, используя открытые протоколы, программный интерфейс, обратные связи, обеспечивает интеграцию управления элементами системы БЛА. Модуль поддерживает итеративные процессы обмена информацией между отдельными БЛА, АОПП и системой управления, реализует рациональные методы навигации и управления и т.п. Применение методов когнитивного моделирования позволяет модулю в автоматическом режиме решать интеллектуальные задачи планирования, целеполагания, прогнозирования, формирования коалиций, непосредственного построения планов и др. Сканируя БЛА и формируя отчёты о работе его бортовой системы, модуль способен диагностировать возникающие в БЛА нештатные ситуации.
Требования к АОПП . Различные приложения накладывают ограничения на дизайн, функционал и характеристики компонентов систем БЛА и, в частности, АОПП:
-
1) идентификация и обеспечение посадочного пространства:
-
- регистрация и передача в навигационную систему координат текущих положений БЛА и АОПП;
-
- посадочная метка необходимого размера и сложности для поиска платформы, визуального распознавания места посадки;
-
- площадь посадки с учётом габаритов проекций обслуживаемых БЛА и погрешности навигационной системы;
-
2) зарядка аккумулятора коптера:
-
- идентификация факта приземления БЛА в правильном положении;
-
- электроснабжение зарядной системы АОПП;
-
- безопасный электрический интерфейс между аккумулятором коптера и источником электроэнергии на АОПП, зарядным устройством и системой обнаружения коптера;
-
- преобразование энергии для использования при зарядке;
-
- контроль расхода электроэнергии и состояния внутренних источников электроснабжения на АОПП;
-
- невозможность отключения аккумулятора непреднамеренно или до завершения полной зарядки без соответствующего управляющего воздействия;
-
- чувствительность батареи к значениям напряжения/тока заряда и т.п.
-
3) мобильность платформы:
-
- лёгкая настройка при развёртывании на новом месте;
-
- возможность транспортировки;
-
4) оперативное выполнение технологических операций с пополнением технологических ресурсов, заменой рабочих органов и т.п.
При разработке автоматических АОПП систем БЛА следует учитывать пилотные навыки/алгоритмы.
На основе вышеописанных обзора и требований разработан эскиз платформы системы БЛА для контроля хода агротехнологических процессов и наблюдения за территориями (рисунок 4). Зона захвата основания БЛА реализована в форме квадрата стороной до 25 см. Горизонтальные размеры плат- формы определяют, в основном, фиксирующая система и механизм блокировки БЛА. Поступательное движение толкателей (активное устройство позиционирования) выполняет реечная передача, определяющая минимальные габариты посадочной плоскости АОПП. При принятых её размерах точное позиционирование разных БЛА обеспечит ход вертикальных толкателей 34 см, горизонтальных – 20 см. Площадь посадочного места (в 1,5 раза больше погрешности навигационной системы) позволит обслуживать БЛА с размером проекции до 50 см. Вертикальный размер платформы определяют ход защитного кожуха и высота её подъёма (гидравлическое подъёмное устройство). После изготовления и исследования образцов некоторые технические решения могут быть скорректированы.
Более точно состав модулей определяется требованиями подлежащей реализации конкретной агротехнологии. При работе системы БЛА совместно с наземными роботами ОАПП может обеспечить электроснабжение и сервисное обслуживание последних.
Для точного позиционирования БЛА на платформе наиболее полно техникоэкономическим требованиям удовлетворяют активные устройства позиционирования с прямыми параллельными толкателями, расположенные на небольшом возвышении относительно посадочной поверхности.
Данные устройства характеризуют высокая точность, надёжность, простота исполнения, универсальность, независимость от количества опор и габаритов БЛА. Также возможно использование пассивных устройств позиционирования.
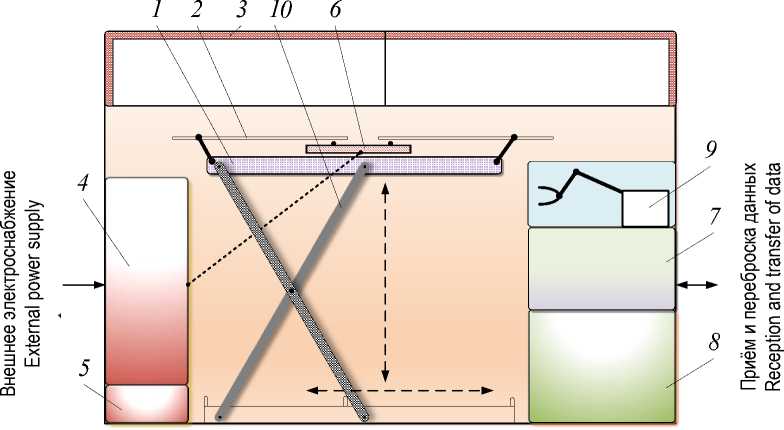
1 – посадочное место; 2 – активное устройство позиционирования (параллельные толкатели) с механизмом фиксации; 3 – открывающийся/закрывающийся защитный кожух; 4 – силовая электрическая часть; 5 – хранилище аккумуляторных батарей; 6 – подзарядное устройство;
7 – бортовой программный комплекс; интерфейс переброски данных; 8 – грузовой отсек;
9 – манипулятор разгрузки/загрузки БЛА, установки/замены/изъятия рабочих органов;
10 – механизм спуска/подъёма посадочного места
Рисунок 4 – Устройство АОПП систем БПЛА для контроля территорий
-
1 – landing place; 2 – active positioning device (parallel pushers) with a locking mechanism;
-
3 – opening/closing protective casing; 4 – power electrical part; 5 – storage of batteries; 6 – recharging device; 7 – on-board software complex, data transfer interface; 8 – cargo compartment; 9 – manipulator for unloading/loading UAVs; installation/replacement/removal of working bodies;
-
10 – landing place descent/ascent mechanism
-
Figure 4 – ASLP device of UAV systems for territory control
Выводы. Реализация крупномасштабных проектов использования систем БЛА в сельхозпроизводстве, в том числе, в составе гетерогенных сельскохозяйственных комплексов, – важная и своевременная задача. Её решение повысит эффективность сельскохозяйственного землепользования и животноводства за счёт оперативности сбора и обработки информации о ходе реализации агропроцессов, погодных условиях и иных аспектах, влияющих на стоимость и скорость выполнения работ, возможности оперативной корректировки этихпроцес-сов и др. Разработка проектов многофункциональных высокоманёвренных модулей систем БЛА, обеспечивающих выполнение поисково-преобразовательных агротехнологических функций в условиях ведения точного аграрного производства на пространственно-распределённых территориях, позволит успешно решать задачи цифровой трансформации сельского хозяйства с привлечением информационно-интеллектуальных ресурсов. Одним из важнейших компонентов в составе этих систем является ОАПП.
Учитывая большое разнообразие, распределение во времени и разную продолжительность выполняемых технологических процессов, непредсказуемость их хода (взаимодействие с самоорганизующимся объектом аграрного производства в условиях саморегулирующейся окружающей среды), предпочтительна модульная структура как всей системы БЛА, так и ОАПП. Эта структура удобна для оценивания и поддержки принятия решения о составе и количестве унифицированных модулей, необходимых для обработки заданной площади угодья, корректируется в зависимости от реализуемой технологии и решаемой задачи.
Точное позиционирование БЛА на платформе эффективно обеспечивают активные устройства позиционирования с прямыми параллельными толкателями, размещённые на небольшой высоте относительно посадочной поверхности БЛА. Эти устройства достаточно точны, надёжны, просты и универсальны в реализации.
