Сети дискретных операторов

Автор: Гурман Владимир Иосифович, Расина Ирина Викторовна
Журнал: Программные системы: теория и приложения @programmnye-sistemy
Рубрика: Методы оптимизации и теория управления
Статья в выпуске: 3 (30) т.7, 2016 года.
Бесплатный доступ
Рассматривается обобщение класса неоднородных дискретных систем (НДС): сети дискретных операторов, как широко распространенные на практике, так и получающиеся при дискретизации соответствующих неоднородных непрерывных систем при решении задач оптимизации. Для указанного класса формулируются достаточные условия оптимальности в виде обобщения и развития работ Кротова
Дискретные системы, достаточные условия оптимальности, сети операторов
Короткий адрес: https://sciup.org/14336082
IDR: 14336082
Nets of discrete operators
Generalization of nonhomogeneous discrete systems — nets of discrete operators — are considered. These nets are both prevalent in practice and can be obtained from discretization of nonhomogeneous continuous systems when optimization problems are solving. For this class sufficient optimality conditions are formulated in the form of generalization and development of Krotov’s works (in Russian)
Текст научной статьи Сети дискретных операторов
Системы неоднородной структуры широко распространены на практике и в настоящее время являются предметом активного изучения представителями различных научных школ и направлений. К ним традиционно относят дискретно-непрерывные, логико-динамические, гибридные и гетерогенные динамические системы, а также системы с переменной структурой. В данной работе рассматриваются системы неоднородной сетевой структуры. Для их моделирования и исследования применяется иерархический подход: строится двухуровневая модель, нижний уровень которой представлен различными управляемыми дискретными системами однородной структуры, а верхний — сетью операторов, обеспечивающей целенаправленное взаимодействие дискретных подсистем. Эту модель можно рассматривать как дальнейшее развитие неоднородной дискретной модели, предложенной и исследованной в ряде работ авторов [1, 2] . Ставится задача оптимального управления, и приводятся достаточные условия оптимальности управления — аналоги известных достаточных условий оптимальности Кротова [3] , в которых фигурируют разрешающие функции типа Кротова для каждого уровня.
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований: проекты № 15-01-01915_a , № 15-01-01923_a, № 15-07-09091_a.
○c Программные системы: теория и приложения, 2016
Рис. 1.
-
1. Сеть операторов и достаточные условия оптимальности
Пусть имеется N операторов произвольной природы Д : Х к x U ^ Y k ,
-
(1) У к = / ( к,х к ,и к ).
Вводятся подмножества Х к д , такие что Н” = 1 Х кд = Х к .
Говорят, что выход оператора I подается на вход оператора к, если для некоторого q имеет место равенство х(к^,х к ) = y i , где х(к, q,х k ) — оператор проектирования на подмножество X kg .
Пусть рассматриваемые операторы соединены указанным образом по некоторой схеме, представляемой ориентированным графом (рис. 1) .
Предполагается, что для данного к между номерами q и I имеет место взаимно-однозначное соответствие.
Иными словами, X k олицетворяет множество входов к-го оператора, занятых в соединениях, а U k — множество свободных входов. Такая модель называется сетью операторов . Специальный случай сети — цепочка произвольных операторов — может рассматриваться как общая модель динамической системы с переменной структурой.
Рассматривается задача о минимуме функционала
N N N
-
(2) I = £ 1 к (Ук) = £ Mf (к,х к ,и к )) = £ / 0 (к,х к ,и к ) 11 1
на множестве D наборов т = { (х к , и к ) } , к = 1,..., N, связанных указанными соотношениями сети и возможными дополнительными ограничениями вида (х к , и к ) € В (к), где В (к) — заданное при каждом к множество. Требуется найти минимизирующую последовательность { m s } С D , т.е. такую, что I(m s ) ^ inf I .
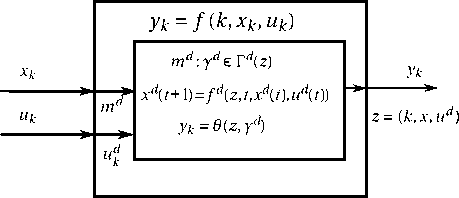
Рис. 2.
Вводится множество E элементов т, не связанных сетевыми условиями — равенствами x(k,j , x k ) = U i . Строится обобщенный лагранжиан:
N
L = -]Т R(k,xk ,ик), k=1
N
-
(3) R ( k,x,u) = ^(^(kJJ ( k,x,u)) - Ф ( 1, к, x ( k,l,x ))) - / 0 ( k,x,u ) , 1=1
-
2. Двухуровневая модель с обыкновенными дискретными системами
где ^(к, l, y k ), k,l = 1,... , N — произвольные функционалы, такие что ^(к, 1,у к ) = 0, если равенство x(k,j,x k ) = y i отсутствует (отсутствует связь l ^ k).
Теорема 1. Пусть имеются последовательность { m s } С D и функционалы ^(k,l,y k ) такие, что R(k,X k s ,U k s) ^ ^(k), k = 1,..., N , где ^(k) = sup { R(k, x, и) : (x, и) e B (k) } .
Тогда { m s } минимизирует функционал I на D .
Доказательство теоремы и первый вариант модели сети операторов даны в [4] .
Предлагается следующая конкретизация абстрактной сети операторов (рис. 2) .
Представим условие (xk,Uk) e B(k) в форме xk e X(k), Uk e U(k,!k), где X(k) — проекция на Xk, U(k,xk) — сечение B(k) при данных k, xk. Пусть на некотором подмножестве K’ С K = {1,...,N} имеем и = (и, md), где ud — произвольной природы, а md — некоторый дискретный управляемый процесс, так что сечение множества U(k, x) при фиксированных x и х есть допустимое множество Dd(k,x, и) с соответствующей дискретной системой
-
(4) x d (t +1) = fd(z, t, x d (t),u d (t)), t G T (z),
x d G X d (z,t) C R n ( k ) , u d G U d (z,t,x d ) C R p ( k ) , z = (k,x,x).
^ d = (t z ,x d , t F , x F ) G { 7 е : t j = т(z),xd = ^(z), t F = ^(z), x F G r d (z) } . Решением этой комбинированной системы будем считать набор т = (x(k), u(k)) G D , где при k G K ‘ : u(k) = (x(k), m d (k)), m d G D d (t, x(k), u d (k)).
Задача оптимизации формулируется для верхнего уровня. Требуется минимизировать функционал (1) . Рассматривается множество E элементов m, не связанных сетевыми условиями — равенствами x(k,j,x . ) = y i и дифференциальными связями нижнего уровня. Вводятся произвольные функционалы v(k,l,y . ), k,l = 1,..., N , такие что V(k, l,y k ) = 0, если равенство x(k,j,x k ) = y i отсутствует (отсутствует связь l ^ k).
Для номеров k G K ’ вводится дополнительно функционал V d (z,t, x d ) Основные конструкции достаточных условий оптимальности имеют следующий вид [2] :
где У к = 9 (z, 7d) при к Е К ’ , у к = / (к, x, и) при к Е К \ К ‘ . Обозначим № = sup { G ( z, 7 d ) : 7 d Е Г (z) } , x d Е X d (z, t j ), x d F Е X d (z,t F ), u d Е U d (k), x Е X (k).
Легко убедиться, что L(m) = I(m) при m Е D , т.е. при выполнении отброшенных связей. Для этого рассмотрим вначале выражение для функции R d . При выполнении рекуррентной цепочки (4)
R d (z, t, x d , u d ) = / (z, t + 1, x d (t + 1) ) - / (z, t, x d (t) ) .
Тогда t p — 1
-
- E R d (z) + Vd (z, ti,xd) - / (z, tF,xdF)) = t l
t p — 1
-
- E (vd (z , t + 1, x d (t + 1) ) - V d ( z, t, x d (t)) + V d ( z, t i ,x) - t l
t p — 1
- V d (.z, tF, x dF ) = - ^ (v d (^z, t, x d (t)) - V d (p t, x d (t) ) ).
t l
С учетом выполнения сетевых связей %(k, j^x k ) ) = у / получим:
N
^ ^ R k EE m ( V ( k,l,y k ) - V ( l,k,y i ))+ K ‘ K ‘ 1 = 1
t p 1 t p 1
+ E ^ d (z,t) - I k (у к ) - ^ M d (z,t). t l t l
Тогда
N
E R k = E E( ^(k, l, У к ) - v(l, k, y i )) - I k (У к ). K' K' 1 = 1
Окончательно имеем:
Теорема 2.
-
1. Для любых p, p d и т Е D имеет место оценка
-
(5) I(т) — I * < Л = L(m) — L * , I * = inf I, L * = inf L.
-
2. Пусть имеются два элемента т1 Е D и т11 Е E и функциона
лы p и p d , такие, что L (т11) < L (т 1) = I (т1) , и т 1 Е D .
Тогда I (т 11 ) < I(т1}.
Теорема 3. Пусть имеются последовательность элементов { rn s } С D и пара (p, pd) такие, что:
-
1) R (k, x s (к) , u s (к)) ^ р (к);
t p 1
-
2) Е ( R d ( z s (k),f,T d (k,t) ,U d (к,!)) — p d (z s (k),t)' ) ^ 0, к Е K ‘ ; t j
-
3) G (z: s (k),p d (k) ) — P (к) ^ 0, к Е K ‘ .
-
3. Заключение
Тогда последовательность { т 8 } — минимизирующая для I на D .
Доказательства теорем 2 и 3 аналогичны приведенным в [2] . Сформулированные достаточные условия позволяют строить конкретные методы и алгоритмы оптимизации.
В работе представлена иерархическая модель сети дискретных операторов, для которой поставлена задача оптимального управления. Даны достаточные условия оптимальности типа Кротова.
Список литературы Сети дискретных операторов
- В. И. Гурман, И. В. Расина. Метод глобального улучшения управления для неоднородных дискретных систем//Программные системы: теория и приложения: электрон. научн. журн. 2016. Т. 7, № 1. С. 171-186, URL:. ↑ 25.
- И. В. Расина. Иерархические модели управления системами неоднородной структуры. М.: ФИЗМАТЛИТ, 2014. -160 с. ↑ 25, 28, 30.
- В. Ф. Кротов. Достаточные условия оптимальности для дискретных управляемых систем//ДАН СССР, 1967. Т. 172, № 1. С. 18-21. ↑ 26.
- В. И. Гурман. Оптимизация дискретных систем: учебное пособие. Иркутск: Ирк. Гос ун-т, 1976. -121 с. ↑ 27. Пример ссылки на эту публикацию: В. И. Гурман, И. В. Расина. Сети дискретных операторов//Программные системы: теория и приложения, 2016, 7:3(30). С. 25-31. URL: http://psta.psiras.ru/read/psta2016_3_25-31.pdf
