Схемы нагружения при моделировании процесса взаимодействия внешнего движителя геохода приконтурным массивом пород

Автор: Бегляков В.Ю., Аксенов В.В., Костинец И.К., Хорешок А.А.
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Рубрика: Строительство горных предприятий и освоение подземного пространства
Статья в выпуске: 3, 2017 года.
Бесплатный доступ
К числу надежных проходческих комплексов, без которых невозможно создание условий для такого высокопроизводительного процесса, как проходка горных выработок, относятся геоходы. Поскольку геометрические параметры внешнего двигателя и винтового канала варьируются, процесс взаимодействия систем геохода с геосредой и между собой требует математического моделирования. Моделирование позволяет представить схемы взаимодействия с различными средами: сыпучими (вязко-подвижными) и крепкими. Подвижность геосреды обеспечивает взаимодействие по всей опорной поверхности лопасти, поэтому увеличение площади лопасти приводит к увеличению тягового усилия. При крепких породах взаимодействие происходит по опорной поверхности лопасти, а свободная поверхность может не соприкасаться с породой. Таким образом, при взаимодействии внешнего движителя (ВД) с геосредой происходит деформирование лопасти; возможно формирование области смятия породы, а учет упругой деформации при определении геометрических параметров лопасти и законтурного канала позволит минимизировать процесс формирования области смятия; при моделировании процесса взаимодействия ВД с геосредой нагрузку можно считать равномерно распределенной и равной пределу прочности породы на одноосное сжатие.
Геоход, внешний движитель, математическое моделирование, процессы взаимодействия, опорная поверхность, геосреда
Короткий адрес: https://sciup.org/140230111
IDR: 140230111 | DOI: 10.17073/2500-0632-2017-3-3-8
Load diagrams for modeling the process of interaction of external geokhod move with a around contur massive rocks
Among the reliable tunneling complexes, without which it is impossible to create conditions for such a high-performance process, as mining of mine workings are geokhods. Since the geometric parameters of the external engine and the screw channel vary, the process of interaction of the geokhod systems with the geo-environment and with each other requires mathematical modeling. Modeling allows presenting schemes of interaction with various environ-ments: loose (viscous-mobile) and strong. The mobility of the geo-environment provides interaction along the entire supporting surface of the blade, so increasing the blade area leads to an increase in tractive effort. In strong rocks, the interaction occurs along the supporting surface of the blade, and the free surface may not touch the rock. Thus, in the interaction of the external propeller (HP) with the geo-environment, the blade deforms; it is possible to form a region of crushing of the rock, and taking into account the elastic deformation in determining the geometric parameters of the blade and the canal will minimize the process of forming the region of crushing; when modeling the process of interaction of the VD with the medium, the load can be considered as uniformly distributed and equal to the ultimate strength of the rock for uniaxial compression.
Текст научной статьи Схемы нагружения при моделировании процесса взаимодействия внешнего движителя геохода приконтурным массивом пород
Для исследования влияния геометрических параметров внешнего движителя (ВД) геохода и винтового канала на НДС породы [1 - 4] необходимо провести математическое моделирование процесса взаимодействия ВД с геосредой [3, 4], что в свою очередь позволит провести теоретические исследования в этом направлении.
Для получения картины НДС породы приконтурного массива при взаимодействии ВД с геосредой необходимо решение сложной контактной задачи. Такие задачи успешно решаются численными методами моделирования с использованием МКЭ [5 — 7].
Для создания численной модели взаимодействия ВД геохода с геосредой необходимо сформировать исходные данные, в число которых входят: физикомеханические свойства геосреды, геометрические параметры внешнего движителя, винтового законтурного канала и их со- пряжения, силы взаимодействия, схема и способ приложения сил к модели и др. [9-10].
Физико-механические свойства геосреды являются известными табличными данными [11].
Геометрические параметры лопасти и канала описаны в работе [12, 13] и являются изменяемыми параметрами, обоснование которых и есть цель моделирования.
Для определения сил взаимодействия необходимо создание модели взаимодействия систем геохода с геосредой и между собой. Задача определения сил, возникающих при движении, может быть решена аналитически.
Взаимодействие лопасти с геосредой может осуществляться при разных моделях поведения геосреды.
При движении по сыпучим или вязко-подвижным породам (рис. 1) геосреда воздействует как на свободную (перед- нюю), так и на опорную (заднюю) поверхность лопасти ВД [14-19]. При этом происходит «проскальзывание», лопасть опорной поверхностью надвигается на геосреду, со стороны свободной поверхности лопасти формируется «пустота». Это приводит к «перетеканию» геосреды через лопасть. Разность давлений на опорной и свободной поверхностях формирует тяговое усилие, создаваемое движителем. При такой модели взаимодействия отсутствует жесткая кинематическая связь между уг- лом поворота движителя и перемещением геохода.
Подвижность геосреды обеспечивает взаимодействие по всей опорной поверхности лопасти. Поэтому увеличение площади лопасти однозначно приведет к увеличению максимального развиваемого тягового усилия. При этом значение имеет как длина, так и высота лопасти движителя.
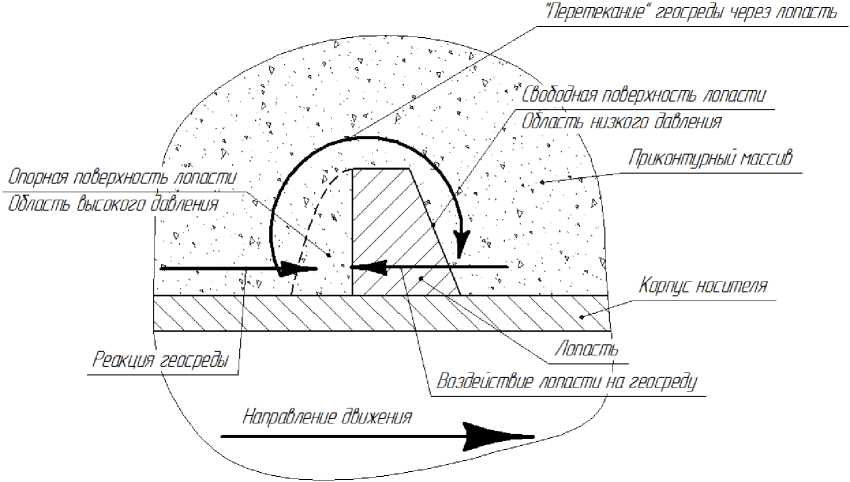
Рис. 1. Взаимодействие ВД с подвижной средой
При движении по достаточно крепким породам (рис. 2) взаимодействие происходит по опорной поверхности лопасти, а свободная поверхность может не соприкасаться с породой.
Ограниченные податливости лопасти и геосреды, отклонения размеров, формы и расположения обусловливает «точечный» характер взаимодействия лопасти с геосредой, или взаимодействие по пятну контакта ограниченных размеров. В этом случае максимальное развиваемое усилие зависит не от площади лопасти, а ограничивается несущими способностями либо межвит-кового целика, либо лопасти ВД. При этом длина и высота лопасти оказывают неоднозначное влияние на максимальное развиваемое тяговое усилие.
Очевидно, что при движении по слабым и крепким породам необходимы совершенно различные подходы к расчету и проектированию внешнего движителя геохода.
Рассмотрим взаимодействие ВД с крепкими породами, т.е. с выполнением следующих условий:
-
• жесткая кинематическая связь между углом поворота движителя и подачей агрегата на забой;
-
• неразрушение межвиткового целика.
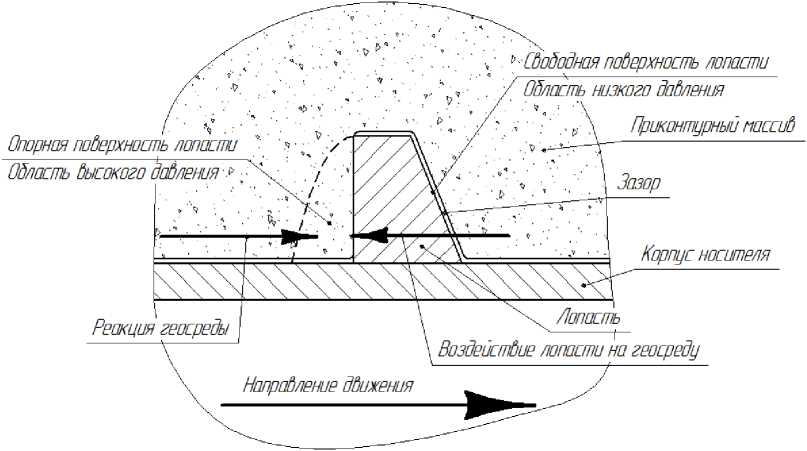
Рис. 2. Взаимодействие ВД с крепкой средой
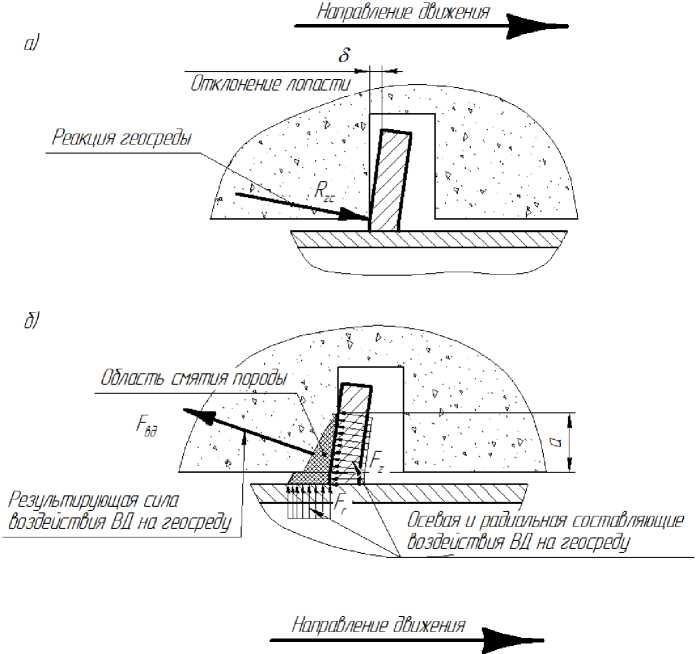
Рис. 3. Схема взаимодействия ВД с геосредой:
а - деформация лопасти ВД под воздействием реакции геосреды, б - формирование пятна контакта и сил взаимодействия ВД и геосреды
На рис. 3 показана схема силового взаимодействия лопасти и геосреды при условии совпадения ненагруженных профилей опорных поверхностей лопасти ВД и винтового законтурного канала.
Из схемы на рис. 3 видно, что к лопасти нагрузка прикладывается в области её подножья, а к породе в области наружной рабочей кромки канала. Очевидно, что до наступления процесса смятия породы (рис. 3, а) площадь кон- такта стремится к нулю. Это приведет к превышению предела прочности породы и к формированию области смятия породы (рис. 3, б). Граница области смятия является границей разрушения, поэтому сделаем допущение, что на границе области смятия породы напряжения в породе равны или весьма близки к пределу прочности на одноосное сжатие и направлены по нормали к границе области смятия породы. Также сделаем допущение, что модель поведе- ния породы в области смятия близка к поведению вязкой среды.
Поверхность, ограничивающую область смятия с одной стороны и неразрушенную породу с другой, можно рассматривать, как вновь сформированную опорную поверхность законтурного канала, к которой приложена равномерно распределенная нормальная нагрузка, численно равная пределу прочности породы на одноосное сжатие (рис. 4).
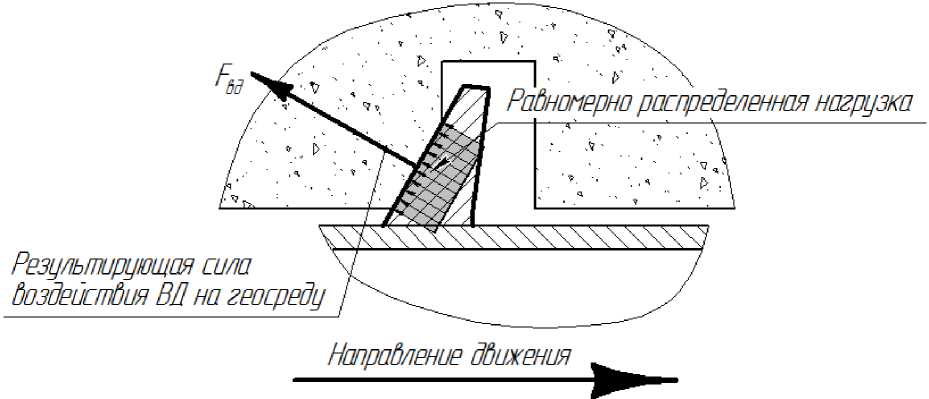
Рис. 4. Схема взаимодействия ВД с геосредой
На рис. 5 показана схема варианта силового взаимодействия лопасти и геосреды при условии несовпадения нена-груженных профилей опорных поверхностей лопасти ВД и винтового законтурного канала. Из схемы на рисунке видно, что сначала нагрузка прикладывается к вершине лопасти и в области внутренней рабочей кромки канала (рис. 5, а). После приложения нагрузки профиль лопасти деформируется, и опорные поверхности совпадают (рис. 5, б), а закон распределения на- грузки по пятну контакта определяется геометрическими и механическими характеристиками лопасти. При такой схеме взаимодействия можно избежать или минимизировать формирование области смятия породы.
Схемы распределения нагрузки по пятну контакта, приведенные на рис. 4 и 5, позволяют допустить применение равномерно распределенной нагрузки при моделировании процесса взаимодействия лопасти ВД с геосредой.
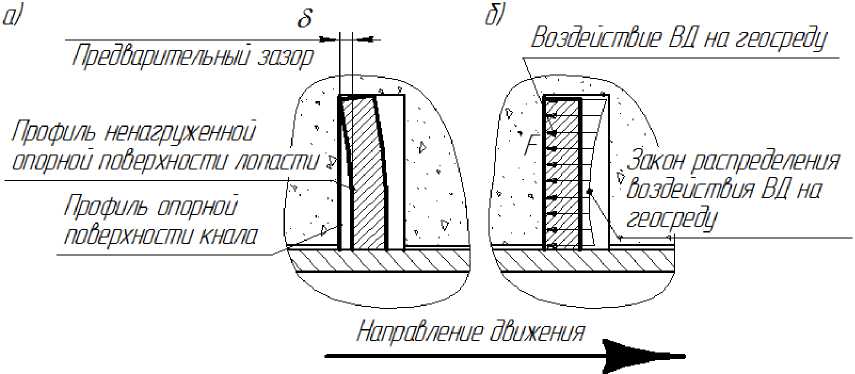
Рис. 5. Схема взаимодействия ВД с геосредой: положение профилей опорных поверхностей а - до приложения нагрузки, б - после приложения нагрузки
Выводы:
-
• при взаимодействии ВД с геосредой происходит деформация лопасти, причем податливость лопасти определяет характер взаимодействия;
-
• при совпадении профилей опорных поверхностей ненагруженных лопасти и винтового законтурного канала формируется область смятия породы;
-
• на границе области смятия породы имеет место равномерно распределенная по поверхности нагрузка, равная переделу прочности породы на одноосное сжатие;
-
• учет упругой деформации при определении геометрических параметров лопасти и законтурного канала позволит избежать или минимизировать процесс формирования области смятия в пятне контакта;
-
• при моделировании процесса взаимодействия ВД с геосредой возможно применение равномерно распределенной нагрузки;
-
• при моделировании процесса взаимодействия ВД с геосредой возможно применение произвольного закона распределения нагрузки.
Список литературы Схемы нагружения при моделировании процесса взаимодействия внешнего движителя геохода приконтурным массивом пород
- Бегляков В.Ю., Аксенов В.В. Поверхность забоя при проходке горной выработки геоходом: монография/В.Ю. Бегляков, В.В. Аксенов//Издательство: LAP LAMBERT Academic Publishing GmbH & Co. KG Heinrich-Böcking-Str. 6-8, 66121 Saarbrücken, Germany. 2012. -139 с.
- Галлагер, Р. Метод конечных элементов. Основы/Р. Галлагер. -М.: Мир,1984. -428 с.
- Алямовский А.А. SolidWorks. Инженерный анализ методом конечных элементов. -М.: ДМК Пресс, 2004. -432 с.
- Александров А.В., Потапов В.Д., Державин Б.П. Сопротивление материалов. 7-е изд. -М.: Высшая школа, 2009. -560 с.
- Моделирование напряженно-деформированного состояния породы, создаваемого воздействием на неё исполнительного органа горной машины/Аксенов В.В., Ефременков Д.Б., Бегляков В.Ю.//Горный информационный аналитический бюллетень. Перспективы развития горно-транспортных машин и оборудования/Москва, МГГУ, 2011 -ОВ №5. с.
- Штумпф Г.Г., Рыжков Ю.А., Шалманов В.А., Петров А.И. Ш 48 Физико-технические свойства горных пород и углей Кузнецкого бассейна: Справочник. -М.: Недра, 1994 -447 с.
- Аксенов В.В., Бегляков В.Ю., Казанцев А.А., Костинец И.К., Коперчук А.В. Классификация геометрических параметров внешнего движителя геохода//Горное оборудование и электромеханика. -2016. -№ 8 (126). -С. 33-39.
- Скоренко Т. Ввинчиваясь в грязь//Популярная механика. -2011. -№ 5 (103). -С. 56-59.
- Батрак Ю.А., Истомина С.В., Шестопал В.П. Определение гидродинамических нагрузок на винте в системе проектирования валопроводов ShaftDesigner.
- Broere W., Faassen T.F., Arends G., van Tol A.F. Modelling the boring of curves in (very) soft soils during microtunnelling. Tunnelling and Underground Space Technology, 2007, 22(5-6), pp. 600-609 DOI: 10.1016/j.tust.2007.06.002
- Deng K., Wang H. Analysis of the carrying capacity of the propelling mechanism of tunneling machines. Journal of Mechanical Science and Technology, 2015, 29 (8), pp. 3343-3349 DOI: 10.1007/s12206-015-0731-8
- Festa D., Broere W., Bosch J.W. Kinematic behaviour of a Tunnel Boring Machine in soft soil: Theory and observations. Tunnelling and Underground Space Technology, 2015, 49, pp. 208-217 DOI: 10.1016/j.tust.2015.03.007
- Kasper T., Meschke G. On the influence of face pressure, grouting pressure and TBM design in soft ground tunnelling. Tunnelling and Underground Space Technology, 2006, 21 (2), pp. 160-171 DOI: 10.1016/j.tust.2005.06.006
- Koyama Y. Present status and technology of shield tunneling method in Japan. Tunnelling and Underground Space Technology, 2003, 18(2-3), pp. 145-159 DOI: 10.1016/S0886-7798(03)00040-3
- Nagel F. Numerical Modelling of Partially Saturated Soil and Simulation of shield-supported Tunnel Advance, Ph. Numerical Modelling of Partially Saturated Soil and Simulation of Shield Supported Tunnel Advance, 2009.
- Peila D., Oggeri C., Borio L. Using the slump test to assess the behavior of conditioned soil for EPB tunneling. Environmental and Engineering Geoscience, 2009, 15(3), pp. 167-174 DOI: 10.2113/gseegeosci.15.3.167
- Shi H., Gong G., Yang H., Mei X. Compliance of hydraulic system and its applications in thrust system design of shield tunneling machine. Science China Technological Sciences, 2013, 56 (9), pp. 2124-2131 DOI: 10.1007/s11431-013-5248-8
- Tang X., Deng K., Wang L., Chen X. Research on natural frequency characteristics of thrust system for EPB machines. Automation in Construction, 2012, 22, pp. 491-497 DOI: 10.1016/j.autcon.2011.11.008
- Wang L., Gong G., Shi H., Yang H. Modeling and analysis of thrust force for EPB shield tunneling machine. Automation in Construction, 2012, 27, pp. 138-146 DOI: 10.1016/j.autcon.2012.02.004
