Синхронизация бортовой шкалы времени космического аппарата с системным временем ГЛОНАСС при помощи аппаратуры радионавигации

Автор: Ковалв Роман Борисович
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 2 (20), 2017 года.
Бесплатный доступ
Спутниковая навигационная система представляет собой комплекс орбитальных объектов, контрольных станций и приёмников потребителей, имеющих жёсткую привязку по пространственно-временным параметрам. Более того, большинство параметров орбитального движения навигационных космических аппаратов с точки зрения потребителя выражается через функции от времени. Обычно коррекция бортовой шкалы времени происходит эпизодически, при её уходе относительно системной шкалы больше допустимого значения. В данной статье рассматривается метод синхронизации бортовой шкалы времени космических аппаратов на геостационарных и высокоэллиптических орбитах с системной шкалой времени ГЛОНАСС по измерениям навигационных параметров при помощи аппаратуры радионавигации. Представлены результаты компьютерного моделирования для подтверждения реализуемости алгоритма синхронизации. Данный материал относится к измерительной технике и может быть использован для улучшения определения частотно-временных параметров высокостабильных генераторов (мер времени и частоты), размещенных на подвижных объектах, например на самолётах или космических аппаратах системы ГЛОНАСС.
Бортовая шкала, космический аппарат, контур синхронизации, board scalе
Короткий адрес: https://sciup.org/14117394
IDR: 14117394 | УДК: 629.78
Synchronization of on-board scale in spacecraft with GLONASS system time using radionavigation equipment
Currently there is a problem of spacecraft time scale synchronization. One of the main problems is trajectory parameters and satellite coordinates measurement. The satellite navigation system is a complex of orbital objects, control stations and user receivers that have space-time referencing. Moreover the most parameters of the orbital motion of the navigation space craft are expressed through time functions from consumer point of view. Usually the on-board time scale correction occurs sporadically, under its offsetting relative to the system scale more than allowable value. The spacecraft on-board time scale synchronization method on Geostationary and High Elliptical Orbits with the GLONASS time scale system based on measurements of navigation parameters using radionavigation equipment is considered. The computer simulation results for acknowledgement of synchronization algorithm feasibility are presented here. This report relates to the instrumentation and can be used to improve the determination of the time - frequency parameters of very stable oscillators (time and frequency measure) placed on mobile objects, for example, aircraft or spacecraft of the GLONASS system.
Текст научной статьи Синхронизация бортовой шкалы времени космического аппарата с системным временем ГЛОНАСС при помощи аппаратуры радионавигации
Для многих космических аппаратов (КА) в настоящее время актуальна проблема наличия высокостабильной бортовой шкалы времени (БШВ). Традиционно для обеспечения высокой стабильности БШВ используются бортовые синхронизирующие устройства, построенные на базе цезиевых или водородных атомных стандартов частоты [2, 3], которые имеют суточную нестабильность частоты порядка 10-13…10-14. Для поддержания столь высокой стабильности создаются сложные бортовые аппаратные комплексы, обеспечивающие функционирование атомного стандарта в условиях постоянной температуры, минимального влияния внешних и внутренних электромагнитных полей, исключения вибраций, что приводит к увеличению массогабаритных параметров КА и его стоимости. При этом для обеспечения синхронизации БШВ с наземными опорными шкалами требуется проводить периодические сеансы сверки и коррекции с использованием специального контура синхронизации на борту и специальных наземных средств. Для обеспечения погрешности
* © Ковалёв Р Б., 2017
синхронизации шкал на уровне единиц или сотен наносекунд требуется проводить от одного до нескольких сеансов сверки с наземной опорной шкалой времени в сутки.
Система ГЛОНАСС является источником точного времени, и ее применение для синхронизации бортовых шкал времени и получения сигналов высокостабильной частоты позволит отказаться от использования сложных и дорогих бортовых атомных стандартов частоты.
Использование синхронизации БШВ по сигналам системы ГЛОНАСС позволяет разгрузить и упростить наземный контур управления и обеспечить возможность реализации длительного автономного функционирования КА на геостационарной орбите (ГСО) и высокоэллиптической орбите (ВЭО) в условиях, когда КА долгое время могут находиться вне зоны видимости наземных комплексов и когда не представляется возможным обеспечить синхронизацию БШВ традиционным способом.
В настоящей статье рассматриваются результаты исследования способа синхронизации частоты и времени по измерениям навигационных
Синхронизация бортовой шкалы времени космического аппарата с системным временем ГЛОНАСС сигналов системы ГЛОНАСС и GPS при использовании относительно недорогих и малогабаритных прецизионных термостатированных кварцевых опорных генераторов с возможностью подстройки частоты.
ШВ в аппаратуре радионавигации формируется из гармонического сигнала 10 МГц от кварцевого генератора, суточная нестабильность частоты которого составляет 5^10-10, а кратковременная секундная нестабильность на уровне 2∙10–12 [4, 5]. Без коррекции этот тип генератора обеспечивает относительное отклонение действительного значения частоты на уровне 10–7…10–8 и без дополнительных систем сверки и синхронизации не пригоден для использования в качестве источника высокостабильной БШВ. Для обеспечения высокой стабильности был разработан метод подстройки частоты опорного генератора аппаратуры радионавигации (АРН) и синхронизации ШВ АРН с системной шкалой времени ГЛОНАСС на основе измерений навигационных параметров (псевдодальности и псевдоскорости) по сигналам навигационных космических аппаратов (НКА) ГЛОНАСС/GPS при помощи АРН.
В разработанном алгоритме учитываются исходные данные, которые можно получить при помощи АРН, а именно:
-
- измеренные значения псевдодальности PD и доплеровского смещения частоты (ДСЧ) FD ;
-
- векторы кинематических параметров (ВКП) КА и НКА;
-
- цифровая информация, извлеченная из эфемерид и альманахов НКА и содержащая поправки ШВ НКА к ШВ систем ГЛОНАСС, GPS.
Путем ряда математических операций из исходных данных получаются выражения для отклонения времени ШВ АРН от системной шкалы времени ГЛОНАСС и относительного отклонения частоты опорного генератора по измерениям от i -го НКА [1]:
dt И = тнка И + ,
^y[z'] = Yhka Н-^Й-(1 + Унка И) —> где дальность r и скорость V рассчитываются по векторам кинематических параметров; литерная частота FLIT, временная тНКА и частотная Yhka поправки извлекаются из альманахов НКА.
Так как имеет место наличие погрешностей в исходных данных, рассчитанные по вышеописанным формулам величины подвергаются отбраковке для исключения аномальных измерений, усредняются по всем НКА и оцениваются путем линейной фильтрации Калмана. Полученные оценки отклонения времени dt и относительного отклонения частоты d Y используются для формирования управляющего воздействия, которое, изменяя частоту опорного генератора, сводит отклонение ШВ АРН от системной шкалы времени ГЛОНАСС к минимально возможному. Обобщенная схема контура управления частотой и временем представлена на рис. 1.
Для подтверждения реализуемости алгоритма синхронизации ШВ АРН с системной шкалой времени ГЛОНАСС/GPS, определения ошибки синхронизации по времени и нестабильности частоты генератора было проведено компьютерное моделирование для варианта опорного генератора с кратко-
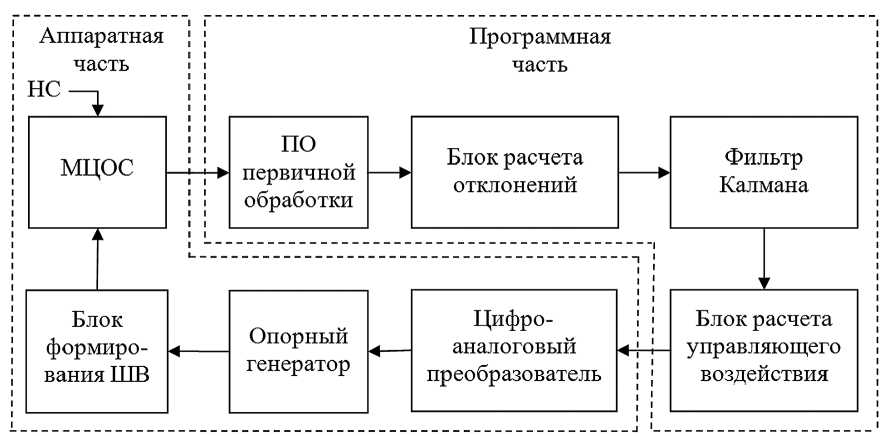
Рис. 1. Обобщенная схема контура управления частотой и временем: НС – навигационный сигнал; МЦОС – модуль цифровой обработки сигнала;
ПО – программное обеспечение
ИССЛЕДОВАНИЯ
Havko____________
Ж ГРАДА временной нестабильностью частоты 2^10-12 за 1 секунду и долговременной – 5∙10–10 за сутки.
В результате моделирования среднеквадратичного отклонения (СКО) времени составило 50 нс, нестабильность частоты за час (сутки, год) не больше 5^10-11 при условии постоянного наличия измерений аппаратурой радионавигации. При условиях разрывного навигационного поля (наличие перерывов в измерениях длительностью до 2 часов с интервалом повторения не менее 6 часов), характерных для КА, находящихся на ГСО и ВЭО, достижимое СКО времени составляет око- 74
Список литературы Синхронизация бортовой шкалы времени космического аппарата с системным временем ГЛОНАСС при помощи аппаратуры радионавигации
- Глобальная спутниковая радионавигационная система ГЛОНАСС / под ред. В. Н. Харисова, А. И. Перова, В. А. Болдина. М.: ИПРЖР, 1998. 400 с.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие; Сиб. гос. аэрокосм. ун-т. Красноярск, 2011. 488 с., [24] с
- Технология производства космических аппаратов: учеб. / Н. А. Тестоедов, М. М. Михнев, А. Е. Михнев [и др.]; Федер. агентство по образованию, Сиб. гос. аэрокосм. ун-т им. М. Ф. Решетнева, ОАО «Информ. спутниковые системы» им. М. Ф. Решетнева. Красноярск: СибГАУ, 2009. 349 с.
- ГЛОНАСС. Принципы построения и функционирования / под ред. А. И. Перова, В. Н. Харисова. Изд. 4-е, перераб. и доп. М.: Радиотехника, 2010. 800 с.
- Сетевые спутниковые радионавигационные системы / В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иванцев [и др.]; под ред. В. С. Шебшаевича. 2-е изд., перераб. и доп. М.: Радио и связь, 1993. - 408 с.
