Синхронный шаговый привод с внешним ротором

Автор: Коломийцев Ю.Н., Цапенко В.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-1 т.12, 2010 года.
Бесплатный доступ
Описан привод для перемешивания жидких технологических сред на основе синхронного шагового двигателя без механической связи между ротором и статором. Показаны преимущества шагового привода перед другими конструкциями, предназначенными для перемешивания жидких немагнитных сред, описаны процессы и особенности работы шагового двигателя с внешним ротором.
Шаговый двигатель, внешний ротор, статор, магнитные полюса, жидкие среды, вязкость, момент удержания, момент нагрузки, механический момент, управляющие импульсы, частота, фаза
Короткий адрес: https://sciup.org/148199354
IDR: 148199354 | УДК: 621.313.13!133
Synchronous stepper with external rotor
The article describes the drive mechanism for mixing of liquid technological media. The mechanism is based on synchronous stepping motor without a mechanical link between the rotor and the stator. The article also reveals the advantages of the stepper in comparison with those of the other constructions for mixing of liquid nonmagnetic media. The processes and peculiarities of functioning of the stepper with external rotor are also described.
Текст научной статьи Синхронный шаговый привод с внешним ротором
Во многих областях техники (электрохимические анализы, гальваника, кулонометрия, анализы свертываемости крови и другие) по технологическим соображениям необходимо перемешивание жидких сред.
Для этих применений наиболее эффективен привод на основе электродвигателя с внешним ротором, т.к. ротор помещается непосредственно в перемешиваемую среду, а механическая связь между ротором и статором отсутствует. Статор электродвигателя размещается вне перемешиваемой среды и содержит магнитные полюса, которые посредством магнитного поля приводят в движение внешний ротор, изготовленный из ферромагнитного материала.
Патентное исследование показало, что в известных двигателях с внешним ротором аналогичного функционального назначения реализован принцип асинхронного двигателя, чем и обусловлены недостатки такого привода, главные из которых:
-
- нестационарность движения перемешивающего элемента (переменное скольжение) вследствие принципиальной зависимости скорости вращения от нагрузки (от переменной вязкости среды).
-
- паразитный и зависящий от вязкости среды нагрев перемешивающего элемента вихревыми токами, протекающими по нему, что делает необходимым введение в установку термостабилизирующих устройств.
с симметричным двуполярным потенциальным управлением; режим работы – полношаговый [1].
ОСНОВНАЯ ЧАСТЬ
В разработанной конструкции шаговый двигатель состоит из неподвижного статора с магнитными полюсами, блока управления и ферромагнитного ротора, причём в качестве ротора шагового двигателя использован цилиндрический магнит с высокой коэрцитивной силой из материала с высоким удельным сопротивлением. На рис. 1 показано использование шагового двигателя с внешним ротором для перемешивания жидкой среды. Статор с магнитными полюсами и блоком управления создаёт магнитное поле для вращения ротора, который вращается синхронно с магнитным полем
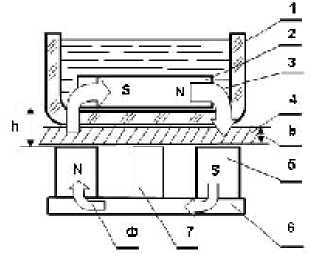
Рис. 1. Перемешивание жидкой среды синхронным шаговым двигателем с внешним ротором:
1 - сосуд из немагнитного материала; 2 - внешний ротор – постоянный магнит с высокой коэрцитивной силой; 3 - перемешиваемая жидкая среда; 4 - немагнитный корпус толщиной b, к которому крепится статор; 5 - пара активных магнитных полюсов статора (подключённых к источнику напряжения в текущий момент времени); 6 - магнитопровод из магнитомягкой стали; 7 - пара магнитных полюсов статора, обесточенных в текущий момент времени; Ф - магнитный поток полюсов статора; h – расстояние между ротором и полюсами статора.
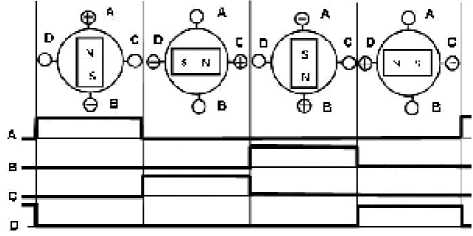
Рис. 2. Распределение импульсов по фазам двигателя в течение каждого шага:
А, В, С, D – выводы катушек фаз
статора. Число пар полюсов р экспериментально выбрано равным 2. Ротор расположен снаружи по отношению к магнитным полюсам (рис. 1) и на некотором расстоянии h от торцевой поверхности полюсов статора, а магнитные полюса статора расположены в точках окружности, плоскость которой горизонтальна. Магнитные полюса шагового двигателя – это 2 пары цилиндрических электромагнитов, включённых попарно – последовательно – согласно и подключённых к выходам транзисторного коммутатора блока управления.
На рис. 2 показана последовательность работы фаз двигателя с внешним ротором в полношаговом режиме. Импульсы напряжения с постоянной скважностью поочерёдно поступают с коммутатора на катушки статора, соединённые последовательно – согласно так, что в каждый момент времени включена только одна фаза (одна пара катушек) и указанному положению ротора соответствует максимальный момент, развиваемый двигателем.
Структура управляющего импульса приведена на рис. 3, взаимное расположение ротора и полюсов статора – на рис. 4. Сопоставляя рис. 2 и рис. 3, видим, что каждое положение ротора, указанное на рис.2, соответствует удержанию ротора полюсами после окончания шага (отрезок времени t3).
Время t1 (рис. 3) нарастания импульса тока в каждой паре полюсных катушек до установившегося значения постоянно и равно:
1, = 3 т — 6 -^°-
1 R о
,
где т -постоянная времени нарастания тока в катушке,
L0 – индуктивность полюсной катушки,
R0 – активное сопротивление катушки.
Рассматривая режим холостого хода примем, что ротор Р (рис. 4) начинает движение по окончании времени t1 нарастания импульса тока I в фазе до установившегося значения (рис. 3). Путь длиной в один шаг, который ротор проходит за время t2 = const (рис.3), измеряется длиной дуги nD
L
T рабочем диапазоне частот, когда (t1 + 12) < скорость V движения ротора по дуге L:
V — - — ( nD /4)/ 1 2,
1 2
не зависит от частоты импульсов генератора. Она неравномерна по длине шага; эта неравномерность особенно видна при частотах вращения до 100 об/мин. При более высоких скоростях из-за инерции ротора неравномерность движения ротора по длине шага практически незаметна.
Отрезок времени t3, в течение которого ротор, замкнув магнитную цепь полюсов, удерживается ими и стоит на месте - величина переменная и зависит от частоты f — 1 / T управляющих импульсов. С повышением частоты t3 стремится к нулю; значение t3 = 0 – это условие достижения предельной скорости вращения (и частоты управляющих импульсов), при которой ротор ещё развивает максимальный момент, т.к. воздействие полюсов на ротор продолжается в течение всего времени шага.
При t3 = 0 можно считать T /2 — 11 +12, откуда
T /2 — 6 L 0 / R0 +12, или
2 Ro fмакс —------------;
6 L 0 + R 0 1 2
При 11 < T /2 ток в фазе хоть и успевает достичь установившегося значения, но воздействие полюсов на ротор измеряется временем T /2 —11 и заканчивается раньше, чем ротор повернётся на 90 градусов и замкнёт магнитную цепь, поэтому момент не достигает максимума, т.к. для этого требуется время t2 (рис. 5). Остальную часть шага до 90 градусов ротор пройдёт за счёт силы инерции и ослабленной силы притяжения следующей пары полюсов, поэтому механический момент ротора при частоте импульсов выше максимальной уменьшается. При 11 > T /2 (штриховые линии на рис.
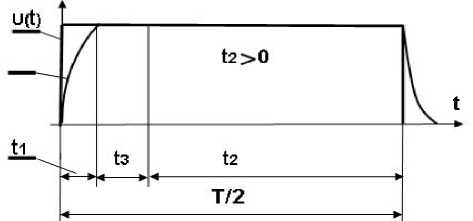
Рис. 3. Структура управляющего импульса: Т-период; t1– время нарастания импульса тока; t2 – время движения ротора(выполнения шага); t3 – время последующего удержания ротора полюсами
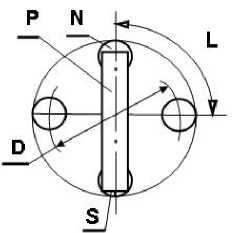
Рис. 4. Взаимное расположение ротора и полюсов статора:
Р – ротор; N,S – северный и южный полюсы; D – диаметр статора; L – длина шага
5) ток в фазе не успевает достичь установившегося значения, поэтому магнитная связь между ротором и статором становится недостаточной (момент трогания меньше момента холостого хода) и шаговый двигатель теряет работоспособность (ротор выходит из синхронизма). Экспериментально установлено, что для ненагруженного двигателя это происходит при t 1 > 0,3 T .
Момент, создаваемый шаговым двигателем, зависит от скорости и тока в обмотках [2]. На рис. 6 для двигателя с внешним ротором показана зависимость намагничивающей силы и момента от угла поворота ротора; она синусоидальна.
В рабочем режиме момент нагрузки определяется вязкостью перемешиваемой среды. Если к ротору приложен момент нагрузки, меньший момента удержания, то угловое положение ротора изменится на некоторый угол б:
N Mн а =---х Sin ---
2 п Му ’
где а - угловое смещение ротора,
N – количество шагов ротора на оборот,
Мн – внешний момент нагрузки,
Му – момент удержания.
Угловое смещение ротора б является ошибкой позиционирования ротора нагруженного двигателя. Эта ошибка растёт с ростом вязкости перемешиваемой среды и не влияет на устойчивость процесса перемешивания до тех пор, пока момент нагрузки не превышает момент удержания двигателя Мн < Му . (Тогда ротор выйдет из синхронизма с полем статора и положение ротора станет неконтролируемым). Однако с ростом вязкости увеличивается время t2 выполнения шага ротора (рис. 3), что снижает предельную частоту управляющих импульсов и скорость перемешивания.
Сила F взаимодействия ротора с полюсами статора в положении, показанном на рис. 1, определяется по формуле [1]:
F =
W 2 х ^ х S т
Список литературы Синхронный шаговый привод с внешним ротором
- Дискретный электропривод с шаговыми двигателями [под общ. ред. М.Г. Чиликина]. М.: Энергия, 1971. 624 с.
- Карпенко Б.К. Шаговые электродвигатели. М.: Энергоатомиздат, 1990.
- Свидетельство о полезной модели. Устройство перемешивания среды посредством магнитной мешалки/Ю.Н. Коломийцев (РФ) №75044, опубл. 20. 07.08, Бюл. № 20.
