Синтез алгоритма синхронизации шкал времени локальной навигационной системы, использующей сверхширокополосные сигналы, и глобальной навигационной спутниковой системы

Автор: Евсеев А.Д., Оробченко С.В., Чугунов А.А., Кочка К.В., Малышев А.П., Черных С.В.
Рубрика: Управление сложными системами
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
На сегодняшний день широко распространены позиционные локальные навигационные системы, которые решают ряд практических задач: мониторинг сотрудников на предприятиях, координатное обеспечение беспилотных летательных аппаратов в помещениях и на открытых пространствах. Однако проблема таких систем заключается в том, что, когда потребитель выходит за пределы рабочей зоны, система не способна обеспечить заданную точность координатных определений. В качестве решения данной проблемы можно предложить обеспечение бесшовной навигации, использующей интеграцию локальной навигационной системы с приемником глобальной навигационной спутниковой системы. Стоит отметить, что существующих решений очень мало и они не затрагивают аппаратную часть приборов, а работают с уже готовыми измерениями от приемника глобальной навигационной спутниковой системы и локальной навигационной системы. В данной статье представлен разработанный метод синхронизации шкал времени приемника глобальной навигационной спутниковой системы и устройства, использующего сверхширокополосные радиосигналы. Синтезирован алгоритм оценки смещения шкал времени. Предложенный метод синхронизации шкал позволяет обеспечивать бесшовную навигацию и совместную обработку измерений и устройства, использующего сверхширокополосные радиосигналы, и приемника глобальной навигационной спутниковой системы.
Локальная навигационная система, ЛНС, приемник глобальной навигационной спутниковой системы, ГНСС, синхронизация шкал
Короткий адрес: https://sciup.org/148331175
IDR: 148331175 | УДК: 539.163 | DOI: 10.18137/RNU.V9187.25.02.P.94
Synthesis of an algorithm for synchronization of time scales of local navigation system using ultrawideband signals and global navigation satellite system
Today, position-based local navigation systems (LNS) are widespread, which solve a number of practical problems, such as employee monitoring at enterprises, coordinate support of UAVs in indoor and outdoor areas. However, the problem with such systems is that when the consumer goes outside the work area, the system is unable to provide the specified accuracy of coordinate determinations. As a solution to this problem, it is possible to propose the provision of “seamless” navigation using the integration of LNS with the receiver global navigation satellite system (GNSS). It should be noted that there are very few existing solutions and they do not affect the hardware part of the devices, but work with ready-made measurements from GNSS receiver and LNS. The method of synchronization of GNSS receiver time scales and the reference radio-navigation point of the local navigation system was developed in this paper. The authors have synthesized an algorithm for estimation of time scale offset. The proposed method of scale synchronization allows to provide “seamless” navigation and joint processing of measurements of the LNS radio navigation reference point and GNSS receiver.
Текст научной статьи Синтез алгоритма синхронизации шкал времени локальной навигационной системы, использующей сверхширокополосные сигналы, и глобальной навигационной спутниковой системы
Для навигации объектов на Земле и околоземном пространстве фактическим стандартом на сегодняшний день являются глобальные спутниковые навигационные системы (далее – ГНСС) [1; 2]. Глобальность данных систем заключается в возможности определения координат объектов в любой точке земли в любой момент времени. Однако сигналы ГНСС имеют ряд недостатков: недоступность в помещениях, под землей, в тоннелях, ограниченность их приема в условиях плотной городской застройки, а также в зонах, где присутствуют помехи.
Для решения задач позиционирования объектов в областях, где ГНСС не обеспечивают требуемую точность координатных определений потребителя, применяются локальные навигационные системы (далее – ЛНС) [3–5]. Наиболее эффективными являются ЛНС, реализующие позиционный метод навигации. К достоинствам данного метода можно отнести высокую точность определения координат потребителя. Данная ЛНС характеризуется необходимостью развертывания и поддержания инфраструктуры опорных радионавигационных точек (далее – ОРНТ), что возможно в большинстве практических случаев. Также распространены корреляционно-экстремальные (обзорно-сравнительные) ЛНС [6; 7] и навигационная аппаратура потребителей, реализующая метод счисления пути (инерциальная, одометрическая, визуально-одометрическая). Известны их гибриды, такие как SLAM (Simultaneous Localization and Mapping).
Позиционные ЛНС на сегодняшний день решают ряд практических задач: мониторинг сотрудников на предприятиях, навигация сервисных и промышленных роботов на производстве, координатное обеспечение роботизированных самоходных тележек на автоматизированных складах, навигация людей в общественных местах (торговых центрах, аэропортах, вокзалах, музеях), трекинг движения тела человека для задач спортивной аналитики, восстановления после травм, игровой индустрии.
В настоящее время набирают популярность позиционные ЛНС, использующие сверхширокополосные сигналы (далее – СШП) стандарта IEEE 802.15.4 [8; 9]. Данный стандарт беспроводной связи характеризуется низким энергопотреблением аппаратуры. Навигационные системы, которые построены на базе технологии СШП, обеспечивают погрешность определения координат объектов в закрытых пространствах от нескольких сантиметров до метра в зависимости от конфигурации.
Если потребитель выходит за пределы рабочей зоны ЛНС, система не способна обеспечить заданную точность координатных определений. В качестве решения данной проблемы можно предложить обеспечение бесшовной навигации, использующей совместную обработку измерений устройства, использующего СШП-радиосигналы (в дальнейшем для кра-
Синтез алгоритма синхронизации шкал времени локальной навигационной системы, использующей сверхширокополосные сигналы...
ткости будет использоваться СШП-устройство), с другими навигационными системами, например, с навигационной аппаратурой потребителя (далее – НАП) ГНСС. На сегодняшний день интеграция таких систем в сложных условиях становится актуальной и востребованной задачей. Стоит отметить, что существующих решений очень мало и они не затрагивают аппаратную часть приборов, а работают с уже готовыми измерениями радионавигационных параметров от ГНСС и СШП-устройств с последующей обработкой [10; 11]. Для перехода к совместной обработке измерений сигналов ГНСС и СШП-устройства предлагается синхронизировать шкалы времени (далее – ШВ) этих систем. При решении задач координатно-временного обеспечения потребителя зачастую возникает необходимость определения одного и того же момента времени в разных ШВ. Разумеется, чаще возникает задача фиксации моментов времени измерений СШП-устройства в шкале времени ГНСС.
Постановка задачи
Пусть имеется ГНСС-приемник и СШП-устройство с некоторым количеством ОРНТ. Измерения радионавигационных параметров в ГНСС приемнике и в СШП-устройстве происходят в разные моменты времени. Эти моменты времени фиксируются в собственных, не связанных между собой шкалах времени этих приборов. Примем, что для синхронизации двух шкал времени между собой необходимо зафиксировать какое-то одно событие в обеих шкалах. Практически в каждом приемнике ГНСС формируется сигнал PPS (Pulsepersecond) и оцифровка момента времени этого импульса в шкале времени ГНСС ( T^HCC ). Необходимо принять сигнал PPS в СШП-устройстве и зафиксировать момент появления этого сигнала в шкале времени СШП-устройства ( ТС0П ). Разность между Т^СС и т С0П будет служить оценкой разности и связью шкал времени НАП ГНСС и СШП-устройства на момент времени Т^СС .
Оценка смещения шкалы времени СШП-устройства
Величина смещения шкалы времени СШП-устройства относительно ГНСС-приемника непостоянна и требует оценки в каждый момент времени приема PPS. Оценка смещения ШВ и события, которые происходят в устройстве, использующем СШП-радиосигналы, происходят принципиально не одновременно. Для обеспечения синхронизации требуется пересчитывать оценки моментов времени этих событий, происходящих в СШП-устройстве, из собственной ШВ в ШВ ГНСС-приемника. Для этого должна обеспечиваться возможность экстраполяции и предсказания смещения ШВ. Поставим задачу оценки смещения шкал времени СШП-устройства и ГНСС-приемника и скорости этого смещения. Данную задачу удобно решать с помощью линейного фильтра Калмана.
Вектор состояния включает в себя смещение ШВ и его скорость:
At k
*
A^ к _
.
x к =
Модель наблюдений:
y k = Hx к + n к , (2)
где H = [ 1 0 ] , n k – дискретный белый гауссов шум наблюдения с дисперсией Dn .
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год
Наблюдениями фильтра на каждом такте синхронизации является скалярная величина
„ _ тГНСС тсшп y k - Tk - Tk
Алгоритм линейного фильтра Калмана
1. Шаг экстраполяции – вычисление экстраполированной оценки вектора состояния и матрицы дисперсий ошибок экстраполированной оценки:
x k - Fx k - 1;
D , f FD , ,F T + GDSGT , x , k x , k - 1 ^
где ^ k 1 - матрица дисперсий формирующего дискретного белого гауссова шума;
F и G – матрицы собственной динамики и формирующего шума соответственно:
F -
1 dT
; G -
0 ■ dT ’
где dT – интервал времени между соседними отсчетами.
-
2. Вычисление коэффициентов фильтра:
-
3. Шаг оценки – вычисление оценки вектора состояния, информативных параметров и матрицы дисперсии ошибок оценки:
К, - D ,H T HD ,H T + D 1 k x , k x , k n
.
^
D -dD v x,k x,k
— К™ U k x , k
x k - x k + K k ( y k — Hx k ) .
Метод синхронизации СШП-устройства и ГНСС-приемника
Для решения поставленной задачи используется экспериментальная установка, состоящая из следующих модулей:
-
• СШП-устройство;
-
• ГНСС-приемник;
-
• персональный компьютер (далее - ПК).
СШП-устройство оснащено приемопередатчиком DW1000 от компании DecaWave (QORVO) 1 , микроконтроллером (МК) STM 32F429ZIT6 и устройствами ввода/вывода (USB, Ethernet). Применяемый приемопередатчик DW-1000 имеет встроенный таймер, который позволяет сохранять метку времени с пикосекундным разрешением.
ГНСС-приемник SinoGNSSK803 2 также имеет USB-выход для подключения к ПК и выход PPS. Полная схема экспериментальной установки представлена на Рисунке 1.
Синтез алгоритма синхронизации шкал времени локальной навигационной системы, использующей сверхширокополосные сигналы...

Рисунок 1. Схема экспериментальной установки для синхронизации временных шкал ГНСС-приемника и СШП-устройства
Источник: здесь и далее рисунки выполнены авторами.
Для синхронизации шкалы времени ГНСС-приемника
t гнсс
и шкалы времени
СШП-устройства tЁ^с используется следующий метод (временна'я диаграмма представлена на Рисунке 2).
Прерывание
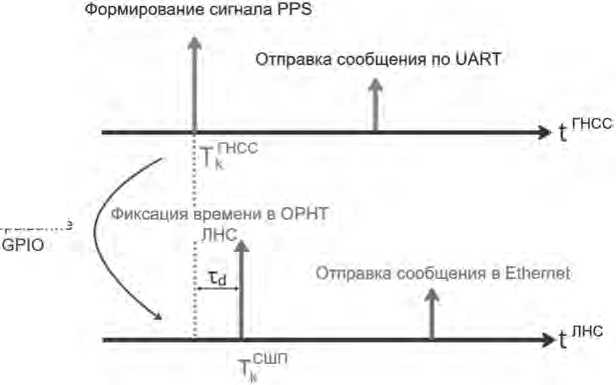
Рисунок 2. Временна΄я диаграмма синхронизации СШП устройства и приемника ГНСС
Выход PPS ГНСС-приемника подключен к одному из контактов GPIO микроконтроллера STM32 СШП-устройства. Этот контакт GPIO сконфигурирован как вход. Каждый раз, когда на него приходит импульс PPS (положительный перепад каждую секунду), по нарастанию импульса срабатывает прерывание текущего процесса микроконтроллера.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год
В функции обработки прерывания фиксируется время импульса ТС0^ ( к — номер момента времени) в шкале времени СШП-устройства. Затем зафиксированное время передается в ПК через Ethernet и сохраняется.
Когда ГНСС-приемник формирует PPS, в нем фиксируется момент времени этого события в шкале времени приемника Т^^С . Оцифровка этого момента времени передается в ПК через интерфейс UART и сохраняется. В итоге на ПК формируется файл, содержащий оцифровки события PPS в шкалах времени СШП-устройства ( ТС0^ ) и ГНСС-приемника ( тГНСС ). Момент времени ТС0^ соответствует времени события PPS c погрешностью τ d, вызванной задержками в передаче PPS до контакта GPIO и задержкой обработки прерывания на МК STM32.
Результаты эксперимента
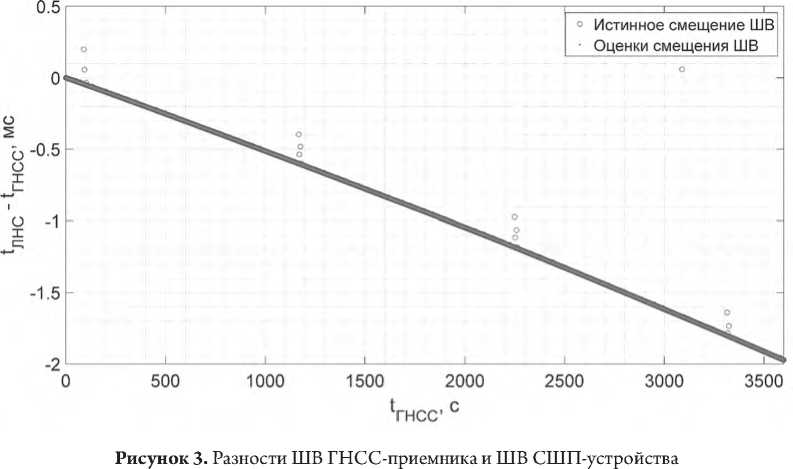
Для проверки разработанного метода синхронизации был проведен эксперимент длительностью 1 час. В течение эксперимента сохранялись моменты времени события PPS в шкалах времени СШП-устройства ( TUWB ) и ГНСС-приемника ( TGNSS ). На Рисунках 3, 4 представлены разности шкал времени ГНСС-приемника и СШП-устройства и производная этой разности (дрейф) соответственно.
Синтез алгоритма синхронизации шкал времени локальной навигационной системы, использующей сверхширокополосные сигналы...
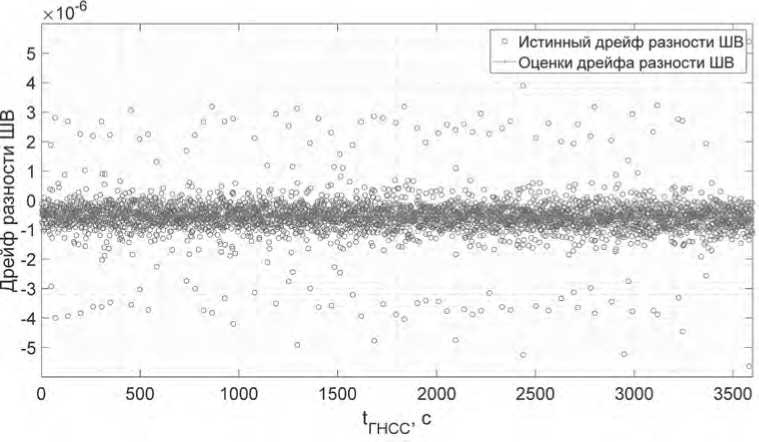
Рисунок 4. Дрейф ШВ ГНСС-приемника и ШВ СШП-устройства
Как можно заметить по Рисунку 3, на рассматриваемых интервалах времени можно принять, что смещение шкал линейное, следовательно, это смещение можно экстраполировать и предсказывать.
Оценка значений моментов времени событий СШП-устройства в ШВ ГНСС-приемника
Для расчета момента времени событий СШП-устройства в ШВ-приемника ГНСС необходимо произвести следующий расчет:
T гнсс = T сшп cc
Л, k
сшп _тсшп ' k ( Tc Tk
где тг^сс — значение момента времени события, которое произошло в СШП-устройстве в ШВ ГНСС-приемника; тс0п — значение момента времени события СШП-устройства в собственной ШВ; тс0п — значение последнего момента времени в ШВ СШП-устройства, на котором произошел последний шаг фильтра Калмана (расчет текущих значений Л k и Л к ).
Заключение
В данной статье представлен метод синхронизации временны΄х шкал локальной и глобальной навигационной системы. Отличительной особенностью разработанного метода является аппаратная связь ГНСС-приемника и СШП-устройства, что обеспечивает их высокоточную синхронизацию.
В данном методе синхронизации присутствует систематическая погрешность, обусловленная задержкой распространения PPS и аппаратной задержкой микроконтроллера.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление», выпуск 2 за 2025 год
Установлен квазилинейный характер ухода разности двух ШВ, что позволяет оценить как смещение, так и скорость нарастания смещения, и использовать эти величины для пересчета событий СШП-устройства в шкалу времени ГНСС-приемника.
Оценен дрейф разности шкал времени СШП-устройства и ГНСС-приемника.
