Синтез алгоритмов управления шаговыми приводами 3D-принтера по осуществлению предписанных движений

Автор: Батырканов Ж.И., Белялов Ш.А., Кадыркулова К.К.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 15 т.5, 2017 года.
Бесплатный доступ
Предложена оригинальная математическая модель шагового привода как объекта управления, на основе которой определяется алгоритм управления шаговым двигателем. Рассмотрены вопросы технической реализации синтезированных алгоритмов управлений, приведена структурно-функциональная схема для рассматриваемых функциональных элементов. Также рассматриваются вопросы погрешности позиционирования шагового двигателя и выбора его угловой скорости.
3d-принтер, драйвер, единичный шаг, предписанная пространственная траектория, управление движением, число фаз, шаговый двигатель, шаговый привод
Короткий адрес: https://sciup.org/147249388
IDR: 147249388 | УДК: 681.171.074:004.356.2
Текст научной статьи Синтез алгоритмов управления шаговыми приводами 3D-принтера по осуществлению предписанных движений
Введение. При проектировании и разработке 3D-принтера важное место занимают вопросы разработки систем управления приводами его рабочих органов. На сегодняшний день в качестве приводов многих типов 3D-принтеров используются приводы, построенные на шаговых двигателях (ШД). В конечном итоге система управления должна обеспечивать движение рабочих органов 3D-принтера по заранее заданным предписанным траекторным движениям. Для синтеза необходимых алгоритмов управления движения приводов по предписанным программам (траекториям), в первую очередь, требуется наличие математической модели динамики шагового привода как объекта управления. Насколько нам известно, в описании промышленно выпускаемых 3D-принтеров информации о математической модели не приводится.
В связи с вышесказанным, целью данной работы является следующее: для 3D-принтера, использующего метод послойного наплавления (см. рис. 1), разработать метод синтеза алгоритмов управления по осуществлению движения шаговых приводов по предписанным программам.
Рис. 1. Упрощенная модель 3D-принтера, использующего метод послойного наплавления.
Разработка математической модели динамики ШД как объекта управления. Прежде всего, приведем базовую информацию о ШД. Для всех типов ШД с помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре ШД. При этом каждый импульс обеспечивает поворот ротора на определенный угол, зависящий от конструкции ШД.
Для синтеза законов управления рассмотрим ШД с зубчатым передаточным механизмом на валу двигателя. При помощи этого механизма вращательное движение ротора двигателя преобразуется в поступательное движение механизмов 3D-принтера (в конечном счете – его печатающей головки).
Пусть на роторном валу ШД посажено (установлено) зубчатое колесо (шестерня) с радиусом R и угловым расстоянием между двумя зубьями Ла градусов, т.е. угол поворота ротора ШД при действии единичного импульса составляет Ла градусов. В дальнейшем требуется представить Ла в радианах. Перевод из градусов в радианы осуществляется по следующей формуле:
При действии единичного импульса на ШД с посаженной на валу его ротора шестерней с радиусом R , одиночный угловой шаг поворота ротора преобразуется в поступательное движение шестерни на расстояние равное
L ш = Да • R ,
где: Д а — шаг поворота ротора ШД при подаче единичного импульса (градусы);
L0 — величина линейного шага шестерни при действии одного импульса на ШД [1].
Так как в ШД шаги осуществляются в дискретные моменты времени, то математическая модель ШД как объекта управления описывается с использованием конечно-разностного выражения
%+ 1 = Ф к + n k( Да ) , (3)
где: ф — текущее угловое положение ротора ШД на tk -ом моменте времени;
пк — количество управляющих импульсов, подаваемых на ШД за отрезок времени [tk , tk+х ] ;
Ф+1 — угловое положение ротора ШД в t k+1 -й момент времени.
Формула (3) используется тогда, когда требуемые перемещения рабочих органов 3D-принтера описаны в угловых координатах. Однако в большинстве случаев необходимые перемещения описываются в линейных координатах, например, когда применяется винтовой редуктор. При этом, аналогично (3), предлагается следующая математическая модель управления движениями рабочих органов 3D-принтера [1]
х к + 1 =х к + nlaJua ;
к к + 1 к к шу ; (4)
[Z к+1 =Z к + п^ш,
где: Хк, Yk , Zk — текущие координаты рабочих органов принтера по осям X , Y , Z в k-й момент времени; Хк +1, Yk+„ Zk+l — координаты рабочих органов по осям X , Y , Z в ( к + 1 ) момент времени; пкх, п^, nkz — количества импульсов поданных на ШД приводов по осям X , Y , Z за указанный промежуток времени; 1Ш„, 1шу, lmz — величины линейных шагов рабочего органа по осям X , Y , Z от действия одиночных импульсов на соответствующие ШД, при этом учитываетсся соотношение (2).
Синтез алгоритма управления шаговым приводом на основе предписанной траектории. Рассмотрим задачу, когда рабочие органы 3D-принтера (печатающие головки) совершают движения согласно табличным представлениям контрольных точек в изготавливаемых изделиях.
Для осуществления этой задачи математическая модель динамики шагового привода приведена в виде (4).
Таким образом, в практическом плане задача управления ШД сводится к нахождению количества управляющих импульсов n , n , n из формул (4) и подаче их на соответствующие ШД за отрезок времени [tk , tk+ J. При этом значения Хк +1, Yk+n Zk+1 берутся из таблицы предписанных (требуемых) контрольных точек пространственной траектории движения рабочих органов 3D-принтера (таблица 1).
Проиллюстрируем построение предписанной пространственной траектории движения рабочих органов 3D-принтера с помощью рисунка 2.
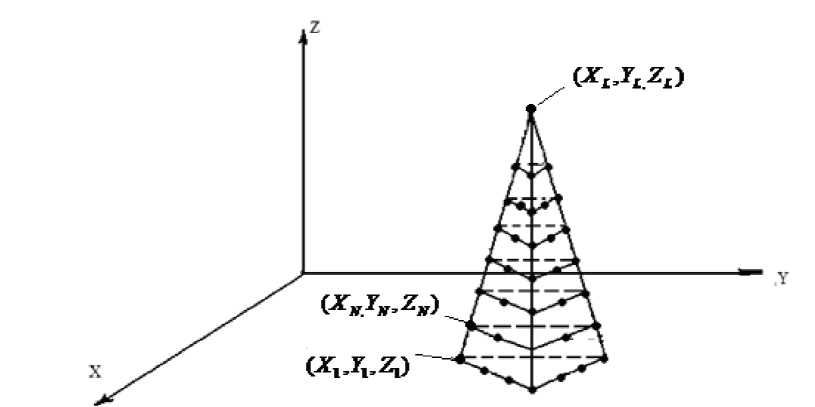
Рис. 2. Пространственная модель детали с нанесенными на нее контрольными точками.
По требуемой пространственной модели объекта с нанесенными на нее контрольными точками строим таблицу для предписанной траектории движения рабочего органа 3D-принтера (см. табл. 1).
Таблица 1
Предписанные координаты в различных точках траектории
|
t s |
t 1 |
t 2 |
t k |
t k +1 |
t L |
tL + 1 |
||
|
x s |
x |
x 2 |
x k |
x k + 1 |
xL |
X L + 1 |
||
|
y s |
y 1 |
y 2 |
y k |
Ук + 1 |
y L |
y L + 1 |
||
|
zs |
z 1 |
z 2 |
zk |
z k + 1 |
zL |
Z L + 1 |
Начало движения печатающей головки осуществляется с момента t и начального положения ( X ,, Y{ , Zx ) . Затем выполняется переход в положение ( X 2, Y 2, Z 2), соответствующее моменту времени t . Далее движение осуществляется аналогично, и в конце первого цикла, соответствующего первому слою воспроизводимого объекта, печатающая головка приходит в начальное положение, т.е. ( X ,, Yx , Z{ ) . Из этого положения осуществляется переход в положение ( XN , YN , ZN ) и затем движение осуществляется по второму слою объекта, воспроизводимого 3D -принтером.
Далее движение выполняется по третьему слою и т.д. Таким образом, слои могут наноситься последовательно, т.е. друг на друга. В конце работы осуществляется переход к конечному положению ( XL , YL, ZL ) .
Для определения l^ , 1ш , l^ в системе (4) нужна конкретная информация о шаговом двигателе и соединенного с валом двигателя редукторе.
Взят ШД марки ДС4-6В и винтовой редуктор с длиной винта 74 мм и диаметром 3 мм. При этом экспериментально определено, что за одиночный импульс винтовой редуктор перемешает нагрузкой на 1,6 мм. Значит l^ = l = l^ = 1,6 мм.
Отметим, что подсчет количества необходимых импульсов по формулам (4) для обеспечения перемещений, задаваемых таблицей 1, может приводить к тому, что расчетное количество импульсов (для определенности – по Х-оси)
nk = (X к+1 -X к)/ 1ш будет выражаться не целым числом. В этом случае берется ближайшее целое число (по стандартным правилам округления), а максимальная погрешность позиционирования ШД составит
^max = 0,51ш ’
Следовательно, чтобы уменьшить погрешность позиционирования ШД нужно уменьшить l . А для этого, в свою очередь, нужно уменьшить величину единичного шага (поворота ротора) Да, которая достигается путем выбора ШД с необходимым количеством полюсов (в том числе, эквивалентных полюсов). Необходимая скорость движения ШД обеспечивается путем уменьшения или увеличения величины отрезка по времени [tk, tk+х ] при фиксированных количествах импульсов, которые должны быть поданы на ШД за этот отрезок. Уменьшение отрезка по времени увеличивает скорость движения (перемещения) ШД и, как следствие, печатающей головки [2; 3].
Вопросы технической реализации системы управления шаговыми двигателями прототипа 3D-принтера. Приведем технические реализации отдельных функциональных элементов прототипа 3D-принтера, которые разработаны авторами и используются на кафедре «Автоматического управления» КГТУ им. И. Раззакова для образовательных и исследовательских целей.
Для управления ШД используется компьютер (ПЭВМ), куда предварительно записывается информация о всех параметрах ШД – таблица предписанных движений рабочих органов 3D-принтера. В компьютере, на основе уравнений системы (4) и заданной величины отрезка по времени [ tk, tk +1 ], осуществляется подсчет необходимого количества управляющих импульсов для подачи на обмотки ШД в течение каждого временного отрезка.
Структурно-функциональная схема системы управления ШД показана на рисунке 3. Она включает следующие объекты: порт LPT (в силу традиционности использования LPT порта для передачи управляющих импульсов на устройство управления и простоты соответствующих схемотехнических решений); шины даных и управления; контроллер; три электронных драйвера и собственно ШД.
От компьютера по интерфейсу LPT приходят сигналы по первым четырем шинам данных для управления обмотками двигателя ШД; по следующим трем шинам передаются управляющие сигналы выбора ШД. Эти сигналы поступают на контроллер. В нем происходит выбор двигателя, который должен работать в конкретный момент времени, путем подачи сигнала выборки на соответствующий канал ШД. Затем импульсы управления подаются в электронный драйвер, в котором они усиливаются по току и напряжению. В конечном итоге эти преобразованные импульсы передаются на обмотки соответствующих ШД, которые и обеспечивают непосредственное управление режимами работы двигателей.
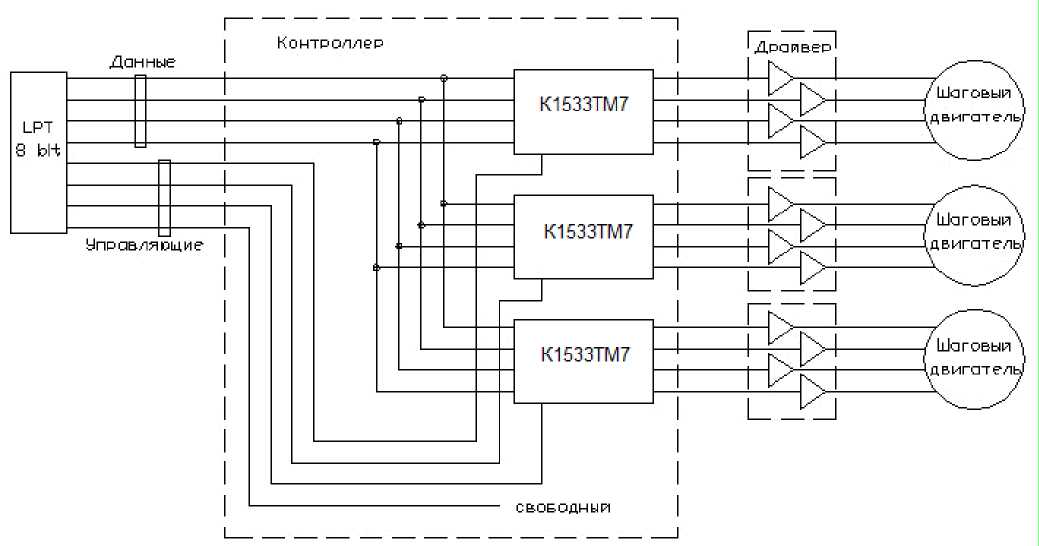
Рис. 3. Структурно-функциональная схема типичной системы управления ШД.
Список литературы Синтез алгоритмов управления шаговыми приводами 3D-принтера по осуществлению предписанных движений
- Батырканов Ж. И., Кадыркулова К. К., Белялов Ш. А. Управление шаговым приводом 3D-принтера: математическая модель и вопросы технической реализации // Прикаспийский журнал: управление и высокие технологии. - 2016. - № 1 (33). - С. 128-138. EDN: VWXXEL
- Большаков В., Бочков А. и др. Основы 3D-моделирования. - СПб.: Питер, 2012. - 304 с.
- Карпенко Б. К., Ларченко В. И., Прокофьев Ю. А. Шаговые электродвигатели. - Киев: Технiка, 1972. - 216 с.
