Синтез и реализация модели объекта управления в графической среде имитационного моделирования Simulink (MATLAB)
")
Автор: Поплавская В.А.
Журнал: Научный форум. Сибирь @forumsibir
Рубрика: Разное
Статья в выпуске: 1 т.1, 2015 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/140220169
IDR: 140220169
Текст статьи Синтез и реализация модели объекта управления в графической среде имитационного моделирования Simulink (MATLAB)
Прикладные науки занимаются изучением предметов материального мира и сил природы и управлением ими в интересах человечества. Сходные задачи решают инженеры, занимающиеся проектированием систем управления.
Существует три основных этапа создания систем управления: анализ, синтез и реализация. При анализе и синтезе систем управления используются математические модели физических объектов. Их динамика в общем случае описывается обыкновенными дифференциальными уравнениями. Большинство реальных систем являются нелинейными, а существующие методы их линейной аппроксимации позволяют использовать преобразование Лапласа для получения связи между входом и выходом элементов в виде передаточных функций.
Основная задача данной работы - изучение математической модели объекта управления, ее построение и реализация в программе математического моделирования MatLAB (Simulink).
Описание объекта управления.
В принтере для компьютера горизонтальное перемещение печатающего устройства вдоль страницы осуществляется с помощью ременного привода [1]. Пример ременного привода принтера с исполнительным устройством в виде двигателя постоянного тока изображен на рисунке 1.
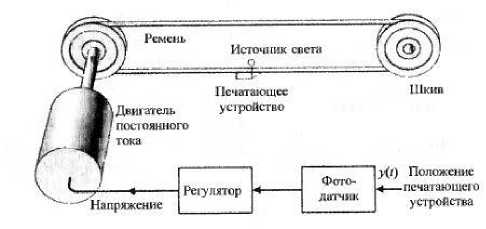
Рис. 1. Пример ременного привода.
Модель ременного привода изображена на рис. 2.
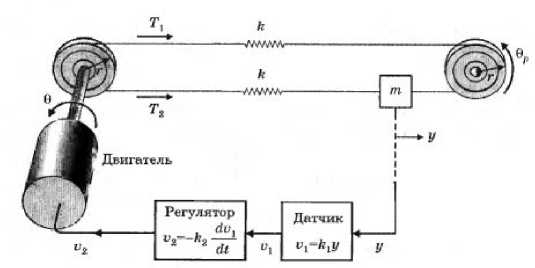
Рис. 2. Модель ременного привода.
Передаточная функция, характеризующая влияние возмущения на характеристики системы (1):
Xt(s)
Td(s)

2kKmk1k?r '
Jmr
После подстановки реальных численных значений параметров в передаточную функцию и определения реалистичных значений коэффициента k в диапазоне [1;40] и коэффициента k 2 (k = 20, k 2 = 0,1), получено выражение:
G(s) =
X1(S)
Td(s)
-15s s3 +25s2 +290s + 530 o"
Синтез передаточных функций регулятора и компенсатора.
Для построения модели произведено вычисление функций, определяющий работы регулятора и компенсатора (Wr(s), Wk(s)).
Функция работы регулятора определяется из формулы 3:
Wr(s)*G(s)= °'5Tm .(3)
е(Тш*з+1)
После выполнения необходимых преобразований и вычислений, получена функция регулятора:
... , x 0.5s3 +12.5s2 +1453+2650...
Wr(s) = -----———. (4)
Далее определяется функция работы компенсатора по формуле 5:
И^М= ^*7TT^.(5)
K G(s) (O.ls+l)2
В результате математических операций получена функция компенсатора:
л л s3 + 25sz+290s+5300...
wk (s) = ————, .(6)
V -0.15s3-3s2-15s
Моделирование реакции контура управления на входные воздействия.
В процессе реализации модели объекта управления на вход подаются три типа сигналов: ступенчатый, линейно – возрастающий и синусоидальный. Произведено отображение выходных сигналов и ошибок на графиках, это показания демонстрируют эффективность использования компенсатора и регулятора при подаче на вход различных сигналов.
Моделирование реакции контура управления на входные воздействия с регулятором.
Регулятор – это устройство, которое следит за состоянием объекта управления и вырабатывает для нее управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления и реагируют на их изменение [2]. Большинство регуляторов работают по принципу отрицательной обратной связи с целями: компенсировать внешние возмущения, действующие на объект управления и отработать заданный закон управления.
Переходный процесс модели объекта управления с линейно - возрастающим входным сигналом отображен на рис. 3.
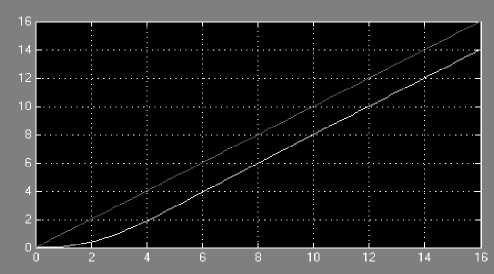
Рис. 3. Результат работы модели с регулятором (ед. измерения по оси х – мм, по оси у - с).
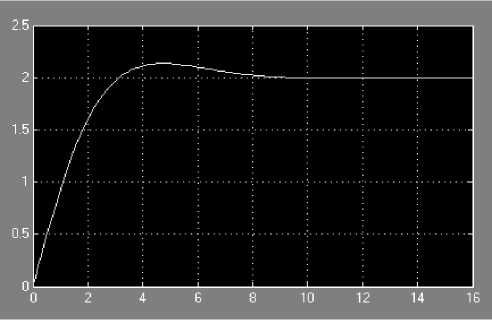
Рис. 4. Ошибка при отсутствии регулятора (ед. измерения по оси х – мм, по оси у - с).
Переходный процесс модели объекта управления с синусоидальным входным сигналом представлен на рис. 5.
Моделирование реакции контура управления на входные воздействия с компенсатором и регулятором.
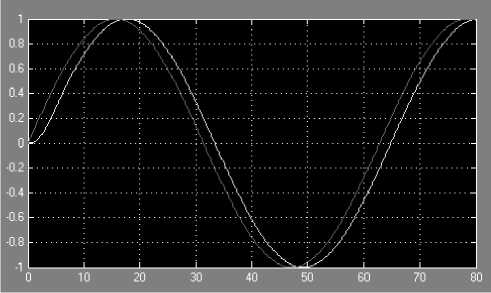
Рис. 5. Результат работы модели с регулятором (ед. измерения по оси х – мм, по оси у - с).
Компенсатор – устройство для возмещения или уравновешивания влияния различных внешних факторов на состояние и работу сооружений, систем, машин, приборов. В системе регулирования компенсирующая часть создает сигнал U, который вызывает такое воздействие, которое компенсирует влияние возмущения на объект, то есть на выходную величину.
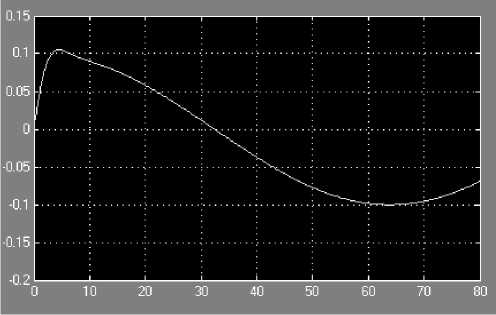
Рис. 6. Ошибка при отсутствии регулятора (ед. измерения по оси х – мм, по оси у - с).
Переходный процесс модели объекта управления с линейно - возрастающим входным сигналом отображен на рис. 8.
Переходный процесс модели объекта управления с синусоидальным входным сигналом отображен на рис. 11.
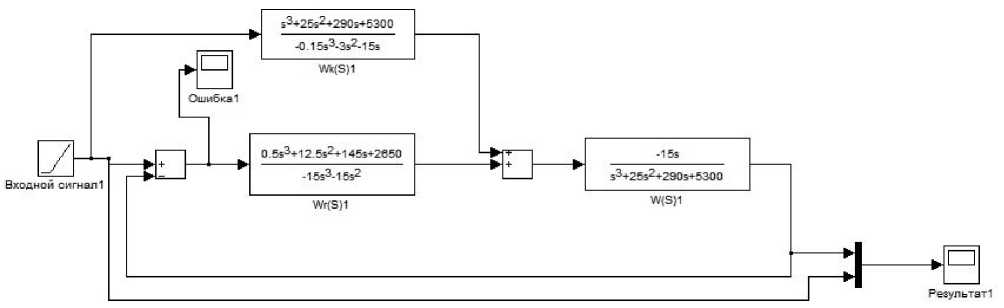
Рис. 7. Замкнутый контур управления с линейно – возрастающим входным сигналом.
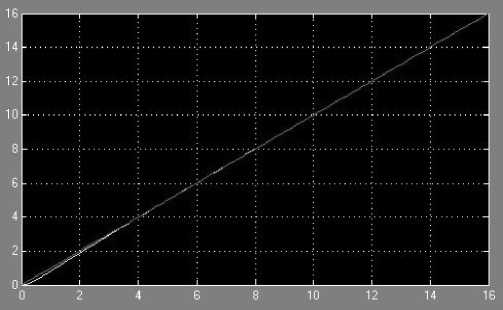
Рис. 8. Результат работы модели с компенсатором (ед. измерения по оси х – мм, по оси у - с).
Заключение. В ходе данной работы были синтезированы регулятор и компенсатор при построении объекта модели управления ременного привода печатающего устройства принтера в программе математического моделирования Simulink (MATLAB), и наглядно продемонстрирована эффективность использования этих устройств. Решена задача по подавлению действия внешнего возмущения и обеспечению качественных переходных процессов.
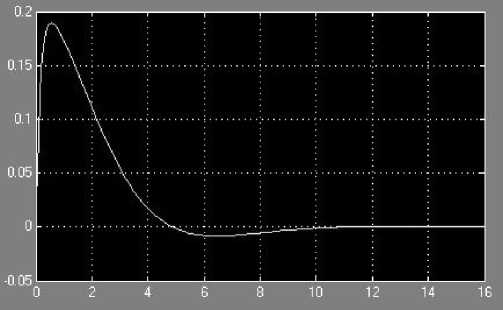
Рис. 9. Ошибка при отсутствии компенсатора (ед. измерения по оси х – мм, по оси у - с).
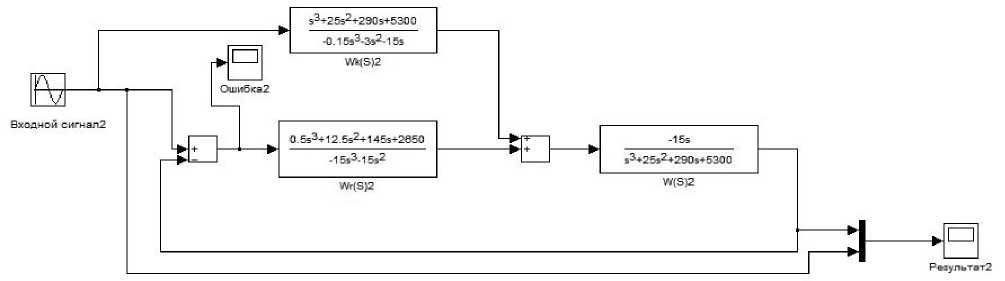
Рис. 10. Замкнутый контур управления с синусоидальным входным сигналом.
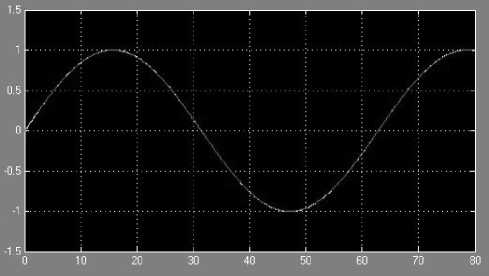
Рис. 11. Результат работы модели с компенсатором (ед. измерения по оси х – мм, по оси у - с).
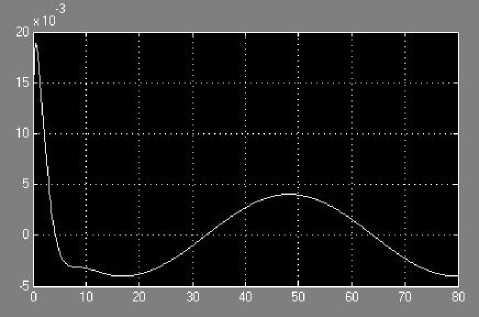
Рис. 12. Ошибка при отсутствии компенсатора (ед. измерения по оси х – мм, по оси у - с).
При построении модели на вход подавались три типа сигналов. Время, отведенное на анализ переходного процесса, по опыту при подаче единичного ступенчатого сигнала и линейно – возрастающего 16 с, при подаче синусоидального сигнала – 80 с. По графику определено время, за которое система выходит на заданное значение = 1: 4,7T m c.
Интернет – ресурс: Регулятор (теория управления).
Список литературы Синтез и реализация модели объекта управления в графической среде имитационного моделирования Simulink (MATLAB)
- Дорф Р., Бишоп Р. Современные системы управления//Пер. с англ. Копылова Б.И. -М.: Лаборатория базовых знаний, 2002.
- http://ru.wikipedia.org/wiki/Регулятор (теория управления)//Интернет -ресурс: Регулятор (теория управления).
