Синтез метода скрытого самонаведения пары перехватчиков на воздушную цель

Автор: Богданов А. В., Закомолдин Д. В., Часовских С. А., Курмояров С. Г.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Информационно-коммуникационные технологии
Статья в выпуске: 4 т.16, 2023 года.
Бесплатный доступ
В данной статье на основе концепции обратных задач динамики приведён синтез метода скрытого самонаведения пары перехватчиков в составе атакующего истребителя и беспилотного летательного аппарата - постановщика активных помех на воздушную цель. Решение данной задачи обусловлено, с одной стороны, требованием повышения эффективности радиоэлектронного подавления бортовых радиолокационных систем противника в интересах обеспечения скрытого самонаведения перехватчика на него, с другой стороны, возникновением непреднамеренных помех на входе приёмника «своей» бортовой радиолокационной системы, приводящих к снижению эффективности её работы, при работе станции активных помех на излучение. Снижение уровня непреднамеренных помех достигается при реализации приведённого метода за счёт управления пространственным положением беспилотного летательного аппарата-постановщика активных помех относительно атакующего истребителя. Кроме того, в статье приведены результаты моделирования процесса наведения пары перехватчиков на воздушную цель, которые свидетельствуют, во-первых, о возможности реализации данного метода, во-вторых, о его эффективности.
Атакующий истребитель, беспилотный летательный аппарат-постановщик активных помех, отношение помеха сигнал, обратная задача динамики
Короткий адрес: https://sciup.org/146282641
IDR: 146282641 | УДК: 621.396.96
Synthesis of the method of hidden homing of a pair of interceptors to an aerial target
In this article, on the basis of the concept of inverse problems of dynamics, a synthesis of the method of covert homing of a pair of interceptors as part of an attacking fighter and an unmanned aerial vehicle - the director of active jamming on an air target is given. The solution of this problem is due, on the one hand, to the requirement to increase the effectiveness of electronic suppression of the enemy’s onboard radar systems, in the interests of ensuring the interceptor’s covert homing on it, on the other hand, the occurrence of unintentional interference at the input of the receiver of “one’s own” onboard radar system, leading to a decrease in its effectiveness work, during the operation of the active interference station for radiation. Reducing the level of unintentional interference is achieved by implementing the above method by controlling the spatial position of the unmanned aerial vehicle-producer of active jamming relative to the attacking fighter. In addition, the article presents the results of modeling the process of pointing a pair of interceptors at an air target, which indicate, firstly, the possibility of implementing this method, and secondly, its effectiveness.
Текст научной статьи Синтез метода скрытого самонаведения пары перехватчиков на воздушную цель
Цитирование: Богданов А. В. Синтез метода скрытого самонаведения пары перехватчиков на воздушную цель / А. В. Богданов, Д. В. Закомолдин, С. А. Часовских, С. Г. Курмояров //Журн. Сиб. федер. ун-та. Техника и технологии, 2023, 16(4). С. 482–496. EDN: GBMLPN самонаведения перехватчика на воздушную цель создаст условия для внезапного пуска ракет класса «воздух-воздух» и завоевания господства в воздухе [6].
Известно, что размещение БРЛС и САП на одном летательном аппарате исключает возможность одновременного эффективного решения ими задач по предназначению [7, 13, 14, 15]. В данной постановке важную роль играет учёт вопросов электромагнитной совместимости (ЭМС) БРЛС и САП. Это обусловлено тем, что задействованный для работы частотный диапазон САП в текущий момент времени определён используемыми частотами БРЛС противника, с целью её подавления, которая (БРЛС противника) при попытке отстроиться от диапазона САП может задействовать частоты «нашей» БРЛС. Следствием этого является то, что САП начинает работать на частотах «нашей» БРЛС, снижая качество её работы. Использование временной регламентации работы БРЛС и САП как способа повышения эффективности их совместного применения может, с одной стороны, привести к срыву сопровождения воздушной цели в БРЛС, вследствие выхода её за пределы строба сопровождения за интервал времени работы САП, с другой – не обеспечить должной эффективности подавления в интервал времени работы БРЛС. Одним из возможных путей, позволяющим снизить влияние непреднамеренных помех и обеспечение одновременного эффективного применения БРЛС и САП, является обеспечение пространственного разноса между ними, который может быть реализован путём размещения их на разных перехватчиках, и назначения данным перехватчикам разных задач.
Обеспечение одновременной эффективной работы БРЛС и САП, размещённых на разных перехватчиках группы, позволит обеспечить постоянное эффективное радиоэлектронное подавление БРЛС противника с недопущением снижения эффективности функционирования «своей» БРЛС, что создаст условия для скрытого самонаведения пары перехватчиков на ВЦ. Под скрытным самонаведением в статье понимается процесс наведения при одновременном выполнении двух условий:
– БРЛС противника подавлена, т.е. не может обнаруживать воздушные цели с заданной вероятностью;
– информация о воздушной целевой обстановке, требуемая для наведения, извлекается из радиолокационных сигналов своей БРЛС, т.е. обеспечены условия для устойчивой её работы.
Причём в такой постановке предпочтительно, чтобы в качестве перехватчика с задачей поражения воздушных целей (носитель БРЛС) был пилотируемый летательный аппарат вследствие потребности принятия решения на поражение воздушной цели человеком, а в качестве перехватчика с задачей прикрытия посредством радиоэлектронного подавления БРЛС противника определить беспилотный летательный аппарат вследствие потребности сохранения жизни пилоту при успешном применении противником противорадиолокационных ракет по постановщику помех.
Исходя из этого цель статьи – синтезировать метод скрытого самонаведения пары перехватчиков на воздушную цель.
Весьма эффективным математическим инструментом, используемым для синтеза сигналов управления пространственным положением летательных аппаратов, является синтез на основе концепции обратных задач динамики [10–12]. В основу такого подхода синтеза сигналов управления пространственным положением летательных аппаратов положены матема-– 484 – тические модели, описывающие исследуемые (управляемые) процессы, представленные в виде дифференциальных уравнений.
Обоснование вида математических моделей
С учётом того что характер решаемой задачи, заключающейся в обеспечении скрытого самонаведения пары перехватчиков на воздушную цель, предполагает управление пространственным положением двух летательных аппаратов (АИ и БЛА-ПАП), причем цели управления каждым из них существенно отличаются, целесообразно обосновать вид двух математических моделей, которые и будут положены в основу синтеза. Отличие целей управления двух летательных аппаратов заключается в том, что для АИ необходимо осуществлять наведение в зону возможного применения ракет, в то время как для БЛА-ПАП требуется целенаправленно изменять пространственное положение относительно АИ в интересах повышения эффективности прикрытия с учётом ЭМС.
Математическая модель для синтеза сигнала управления атакующим истребителем
В качестве математической модели, положенной в основу синтеза сигналов управления пространственным положением АИ с задачей поражения ВЦ, может быть положена модель, позволяющая преобразовывать координаты состояния абсолютного движения в координаты относительного движения вида [8, 9, 17]:
' , J АИ 7вЦ
^АИ — <УAИ^ 7 з^Аи(^) — ^АИО’
-Оаи
' 2Ваи Уаи- 7 ВЦ
Оаи =--<Уаи ----------, Юаи( U I = Оаио,
D D
^АИ ^АИ где фАИ - бортовой пеленг воздушной цели с АИ; гоАИ - угловая скорость вращения линии визирования «АИ – ВЦ»; DАИ – расстояние от АИ до ВЦ; – скорость изменения расстояния между АИ и ВЦ; jАИ – поперечное ускорение АИ; jВЦ – поперечное ускорение ВЦ.
Математическая модель для синтеза сигнала управления БЛА-ПАП
В качестве математической модели, используемой при синтезе сигналов управления пространственным положением БЛА-ПАП целесообразно использовать модель, разработанную в [5] для совместного наведения атакующего истребителя и истребителя прикрытия вида:
. АИ
Кп
R- R3
где, кроме ранее принятых, – текущее отношение помехи/сигнала на входе приемника атакующего истребителя; V БЛА – скорость БЛА–ПАП; ψ БЛА – курс БЛА–ПАП; R – интервал (расстояние) между БЛА-ПАП и АИ; w - константа, определяемая энергетическими характеристиками БРЛС, САП и ВЦ [5].
Особенность данной модели в том, что она позволяет установить аналитическую зависимость между параметрами геометрии взаимного расположения БЛА-ПАП, АИ и ВЦ и теку- щим значением отношения мощности помехи к мощности сигнала на входе приёмника БРЛС АИ, величина которого определяет эффективность функционирования БРЛС и используется, во-первых, при обеспечении и оценки ЭМС БРЛС и САП при оценке устойчивости работы БРЛС и, во-вторых, при оценке эффективности подавления БРЛС противника (эффективности прикрытия АИ).
Постановка задачи и синтез метода скрытого самонаведения пары перехватчиков
Пусть управляемая динамическая система в составе пары АИ и БЛА-ПАП описывается дифференциальными уравнениями вида (1) и (2).
Требуется найти управление u ( Z ) для АИ, осуществляющего самонаведение на ВЦ - требуемое значение поперечного ускорения у АИ и для БЛА-ПАП, осуществляющего наведение командным методом с АИ – требуемое значение курса ψ БЛА , переводящее рассматриваемую пару перехватчиков из произвольно начального состояния в заданное состояние, обеспечивающее наряду с точностью выведения АИ в зону применения оружия (определяемую величиной текущего промаха), с одной стороны – эффективное подавление БРЛС противника (определяемое
), с другой - недопущение снижения эффективности функционирования БРЛС АИ (определяемое ) вследствие воздействия непреднамеренных помех, по требуемой траектории, обеспечивающей минимум функционала [10, 11]:
ч
1= |ф(х,Хтр,и,/)51 (3)
о при условии, что на вектор состояния x(t) накладываются дополнительные ограничения в следующем виде
F = (x,xip,t) = х-ХтР = 0 , (4)
где F – в общем случае векторная функция, размерность которой совпадает с размерностью вектора требуемых координат состояния х тр (t).
Пусть в момент времени t = t 0 справедливо условие (4), тогда оно должно выполняться и при t > t 0 . Если (4) не выполняется, то оно преобразуется к виду:
lim = F(x,Xip,t) = O . (5)
Смысл ограничений (4) и (5) заключается в следующем. Если объект управления находится на некоторой гиперповерхности F ( x, х тр , t) = 0, то он будет находиться на ней при любом t > t 0 . Однако если в начальный момент объект расположен либо ниже, либо выше гиперповерхности, то за счет u (t) он асимптотически будет к ней стремиться [10, 11].
Синтез закона самонаведения атакующего истребителя
Функционал (3) для АИ, минимизация которого должна быть обеспечена за счёт реализации управления j АИ , имеет вид:
ч
-
1 = J ФС^АИ’ ^ТР. J АИ - ./вц)^ (6)
О при условии

или
limFC^p^p^O,
где F(<^АИ, <^ТР) — функция текущего и требуемого угла пеленга цели, которая является скалярной и неотрицательной.
Продифференцировав по времени первое выражение модели (1), описывающее изменение , получим
Подставив (Уди из второго выражения системы дифференциальных уравнений (1) в (9), получим
.
Анализ (10) позволяет установить, что сигнал управления связан с управляемой координатой φ АИ дифференциальным уравнением второго порядка, исходя из этого, уравнение (10) может быть представлено в виде:
F2 F
^2 + %\ -^О^С^ди’ ^Тр) — 0,
Г Г где — и--вторая и первая производная соответственно, х и %0 - в данном случае весовые коэффициенты, обеспечивающие устойчивость решения (11).
Подставив (10), первое уравнение (1) и (7) в (11) с учётом постоянства φ ТР , получим

Решив (12) относительно сигнала управления j АИ , получим
2Раи /х
-
—— <УАИ - ^бУАИ ^д (^ди—^тр)
/ли
И _________________________________
-
1 11 А
- -у—+ Zi —--—ГТ^АИ
"^АИ D I АI
'ли /Jah
.. „ • [^АИ^АИ+^цЗШ^аи | , т, • причём ^р = arcsin ----------------- , Раи^аи + 1ц ЗШ^АИ р 1 АИ
V ГАИ )
где Е ц , VАИ — скорости полёта цели и АИ соответственно.
Таким образом, на основе концепции обратных задач динамики синтезирован сигнал управления (13), позволяющий получить оптимальную траекторию полёта АИ при его самонаведении на ВЦ. Анализ полученного сигнала управления (13) позволяет прийти к следующим заключениям:
-
- сигнал управления зависит от ошибок соответствия параметров, описывающих пространственное состояние ф АИ их требуемым значениям ф ТР . Вес ошибок управления Д ф = ф ^ - (рт? зависит от динамических свойств летательного аппарата (ЛА), определяющих значение Х о , расчёт которых описан в [10, 11, 12];
-
— в качестве информационного обеспечения для реализации (13) требуется Dm, Dm, D АИ ф АИ , j вц. Данные оценки могут быть сформированы на основе измерений имеющихся на борту перехватчика датчиков, что, в свою очередь, свидетельствует об отсутствии принципиальных ограничений на его реализацию.
Синтез закона командного наведения беспилотного летательного аппарата–постановщика активных помех
Функционал (3) для БЛА-ПАП, минимизация которого должна быть обеспечена за счёт реализации управления ψ БЛА , имеет вид:
i = \»vK”,K™T,cosVma. (14)
О при условии
IUT. Л'™ ) = С (0 - С„ (О, (15)
где Г(/<пИ, ^р) — функция рассогласования между текущим и требуемым значением коэффициента подавления, создаваемого на входе приёмника БРЛС АИ.
Анализ (2) позволяет установить, что сигнал управления связан с управляемой координатой дифференциальным уравнением первого порядка, исходя из этого, уравнение (2) может быть представлено в виде:
Подставив (15) в (16) и преобразовав с учетом того, что = const, получим
. ЛИ
. (17)
С учётом формулы (2) выражение (17) примет вид:
4wD3m РАи
R3
^блл^^^блаЗ^аи, R3
+z(CI-^X)=o.
Решив (18) относительно требуемого курса БЛА—ПАП cos у БЛА , получим выражение сигнала управления БЛА–ПАП:
или
С08^бла =
4W-DAH ^АИ , -,/^АИ к^АИ х ------+ Z(^n Am)
R
2^^
^бла = acrcos
V D wD к БЛА^АИ к БЛА KV7VAH
.
Таким образом, синтезирован сигнал управления, позволяющий формировать необходимую траекторию полёта БЛА-ПАП.
Анализ выражения (13) и (20) показывает, что для формирования сигнала управления пространственным положением пары перехватчиков необходимо, чтобы на борту АИ формирова- лись оценки и энергетических характеристик БРЛС и САП, требуемых для расчёта w.
Исследование эффективности синтезированных сигналов управления парой перехватчиков на основе моделирования
С целью оценки эффективности синтезированных сигналов управления АИ и БЛА–ПАП (13) и (20) при решении каждым из них распределённых задач в работе проведено моделирование.
В качестве исследуемых показателей эффективности в работе приняты:
-
– для АИ – текущий промах при осуществлении самонаведения на ВЦ с выходом в ЗВПР, вычисляемый в соответствии с выражением вида:
- ДаИ^АИ ( 1 О ’ (21)
где V O - относительная скорость между АИ и ВЦ;
-
- для БЛА-ПАП - реализуемый в процессе наведения коэффициент подавления, характеризующий отношение помеха/сигнал на входе БРЛС АИ (определяющий устойчивость работы в условиях непреднамеренных помех), вычисляемый в соответствии с выражением вида:

Д р Г* /^АИ к г та 4
ЛГСАП^бл-САП ^бл. БРЛС Ш прм77 АИ
О^А.-'УЧ
и реализуемый коэффициент подавления, характеризующий отношение помеха/сигнал на входе приемника БРЛС ВЦ (определяющий эффективность её подавления), вычисляемый в соответствии с выражением вида:

В выражениях (22), (23) приняты следующие обозначения: Рпи Рс - соответственно мощность помехи и сигнала на входе приёмника БРЛС АИ; и – соответственно мощность помехи и сигнала на входе приёмника БРЛС ВЦ; и PСАП – соответственно мощность БРЛС АИ и САП, размещённой на БЛА; ДД, |( и G^, |С - соответственно коэффициент на- правленного действия антенны БРЛС ВЦ и АИ; Gбл.САП и ^бл.БРЛС – соответственно коэффициент направленного действия боковых лепестков САП, размещённой на БЛА и БРЛС, размещённой на АИ; Δfпрми д/S – соответственно полоса пропускания приёмников БРЛС АИ и БРЛС ВЦ; D АИ – текущее расстояние от АИ до противника; R2 – текущий интервал между парой перехватчиков; σц и σи – эффективная поверхность рассеивания цели и АИ соответственно.
При расчетах в качестве исходных данных приняты следующие характеристики: Р сап =200 Вт.; G бл.сап = 2; G о.сап = 1000;G"=4; Δ f п. = 50 МГц.; допустимое значение коэффициентов подавления на входе приемников БРЛС АИ и ВЦ, при которых БРЛС ещё работает устойчиво, принято, к примеру, соответственно: п.(доп) п.(доп) (в случае превышения текущих значений данных параметров, вычисляемых в соответствии с выражениями (22) и (23), допустимых их значений принимается, что БРЛС подавлена); ^бртс = Рбрлс = 2500 Вт.; ^брлс ^брлс 1 О ; эффективные поверхности отражения цели и АИ σ и = σ ц = 5 м2; Д/прм =4/;^ =Ю0Гц
На рис. 1 и 2 в декартовой системе координат приведены результаты моделирования процесса наведения АИ и БЛА–ПАП при манёвре ВЦ и в случае его отсутствия (стационарный полёт).
Начальные условия моделирования.
АИ: x 0АИ = 2000 м., z 0АИ =0 м., ψ АИ = 900, V АИ = 250 м/с.
БЛА–ПАП: x 0 БЛА–ПАП = 724 м., z 0 БЛА–ПАП = 0 м., ψ БЛА–ПАП = 900, V БЛА–ПАП = 250 м/с.
ВЦ: x 0ВЦ = 1200 м., z 0ВЦ = 150000 м., ψ ВЦ = 2700, V ВЦ = 250 м/с.
Анализ траекторий полёта АИ и БЛА–ПАП, приведенных на рис. 1 и 2, позволяет говорить о возможности применения разработанных сигналов управления при перехвате ВЦ на встреч-нопересекающихся курсах при стационарном полёте и при манёвре цели.
Для оценки эффективности самонаведения АИ на ВЦ на рис. 3, 4 приведены оценки текущего промаха в процессе самонаведения, рассчитанные в соответствии с выражением (21). Анализ рисунков позволяет судить о том, что в процессе самонаведения значения текущего промаха снижаются и на конечном этапе стремятся к нулю, как при стационарном полёте ВЦ,
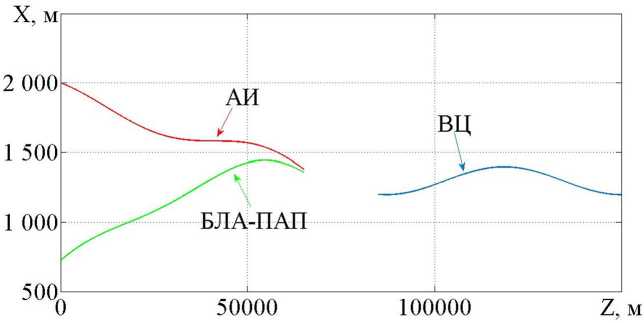
Рис. 1. Траектории полёта атакующего истребителя, беспилотного летательного аппарата–постановщика помех при манёвре воздушной цели
Fig. 1. Flight trajectories of an attacking fighter, an unmanned aerial vehicle-jammer when maneuvering an air target
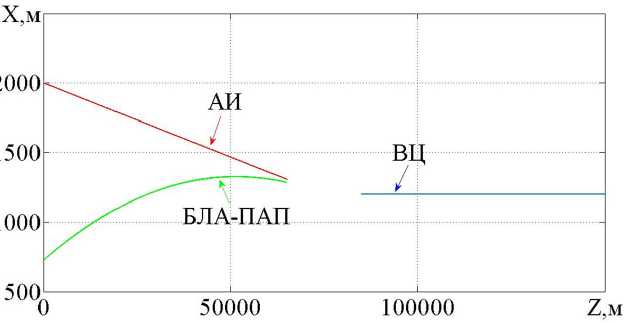
Рис. 2. Траектории полёта атакующего истребителя, беспилотного летательного аппарата–постановщика помех при отсутствии манёвра воздушной цели
-
Fig. 2. Flight trajectories of an attacking fighter, an unmanned aerial vehicle-jammer in the absence of an air target maneuver
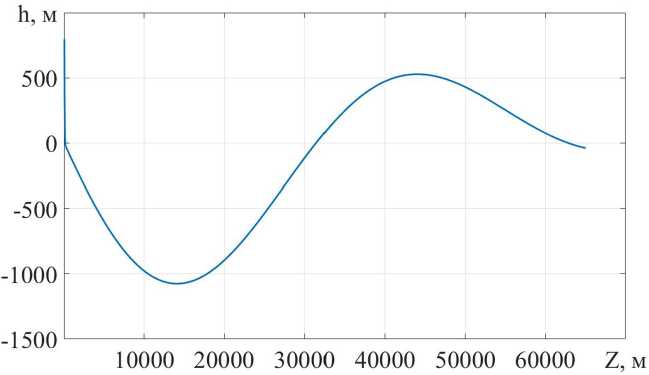
Рис. 3. Текущий промах атакующего истребителя при манёвре воздушной цели
-
Fig. 3. The attacking fighter’s current miss when maneuvering an air target
Рис. 4. Текущий промах атакующего истребителя при отсутствии манёвра воздушной цели
-
Fig. 4. The current miss of the attacking fighter in the absence of an air target maneuver
так и при её маневрировании, что свидетельствует о высокой эффективности самонаведения АИ. Для оценки эффективности наведения БЛА–ПАП с учётом расположения АИ на рис. 5 и 6 приведены:
– оценки текущего расстояния (интервала) между АИ и БЛА–ПАП (рис. 5а);
– оценки мощности помехи на входе приёмника БРЛС АИ, создаваемой БЛА, оснащенного САП (рис. 5б);
– оценки реализуемого в процессе наведения коэффициента подавления, показывающего отношение помеха/сигнал на входе приёмника БРЛС АИ (рис. 5в);
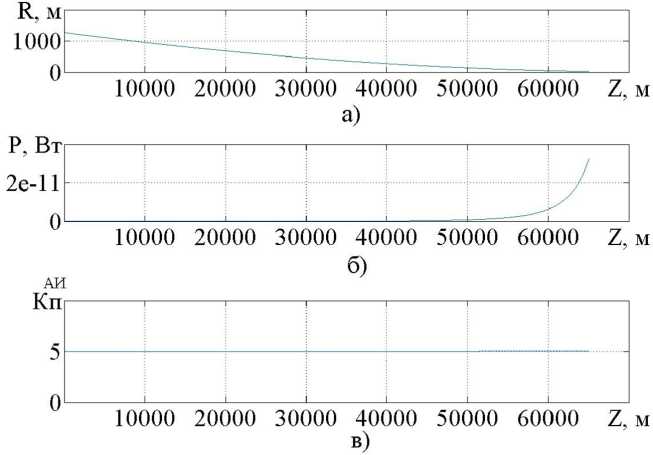
Рис. 5. Расстояние между атакующим истребителем и беспилотным летательным аппаратом– постановщиком активных помех (а); мощность помехи на входе приемника бортовой радиолокационной системы атакующего истребителя (б); отношение помеха/сигнал на входе приёмника бортовой радиолокационной системы атакующего истребителя (в)
Fig. 5. The distance between the attacking fighter and the jamming unmanned aerial vehicle (a); interference power at the input of the receiver of the onboard radar system of the attacking fighter (б); interference / signal ratio at the input of the receiver of the onboard radar system of the attacking fighter (в)
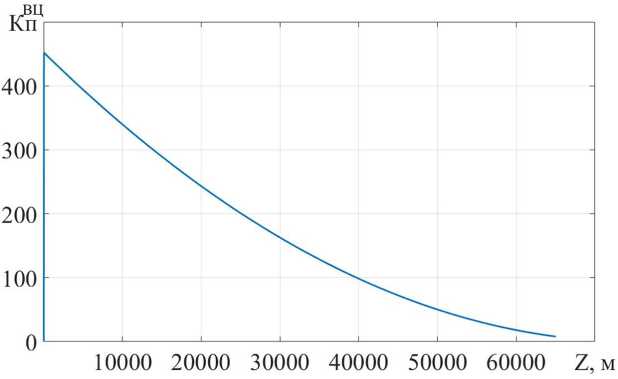
Рис. 6. Реализуемое отношение помеха/сигнал на входе приёмника бортовой радиолокационной системы воздушной цели
Fig. 6. Implemented noise/signal ratio at the input airborne radar receiver
– оценки реализуемого в процессе наведения коэффициента подавления, показывающего отношение помеха/сигнал на входе приёмника БРЛС ВЦ (рис. 6).
Анализ рис. 5, 6 позволяет сделать следующие выводы:
– в процессе наведения БЛА–ПАП целенаправленно изменяет начальные параметры боевого порядка, о чём свидетельствует изменение расстояния R между АИ и БЛА–ПАП, что обусловлено возрастающей мощностью отраженного от ВЦ сигнала. Увеличение мощности отражённого от ВЦ сигнала требует в интересах обеспечения постоянства реализуемого коэффициента, показывающего отношение помеха/сигнал на входе приемника БРЛС АИ, увеличения мощности помехи, которое достигается сокращением интервала между АИ и БЛА–ПАП (рис. 5а). Целенаправленное изменение расстояния между АИ и БЛА-ПАП обеспечивает требуемое отношение помеха/сигнал на всей продолжительности наведения (рис. 5в), что свидетельствует об эффективности работы БРЛС АИ;
– в процессе наведения БЛА–ПАП, с учётом расположения АИ, оценка реализуемого отношения помеха/сигнал на входе приёмника БРЛС ВЦ (рис. 6) существенно превышает допустимое значение данного показателя, при котором обеспечивается устойчивая работа его БРЛС. Это свидетельствует об эффективности подавления БРЛС ВЦ и создании условий для скрытого самонаведения АИ.
Таким образом, в результате моделирования установлено, что при реализации синтезированных сигналов управления парой перехватчиков в составе АИ (13) и БЛА-ПАП (20) создаются условия их скрытого самонаведения в зону применения оружия.
Выводы
В статье на основе концепции обратных задач динамики решена задача синтеза сигналов управления пространственным положением пары перехватчиков в составе АИ с БРЛС и БЛА– ПАП, реализация которых позволяет осуществить их скрытое самонаведение в зону применения оружия класса «воздух-воздух».
На основе моделирования оценена эффективность синтезированных сигналов управления, которая наряду с оценкой практической реализуемости свидетельствует о высокой эффективности решения каждым перехватчиком назначенной ему задачи, в частности, атакующий истребитель с высокой точностью (рис. 3, 4) выводится в зону применения оружия, БЛА-ПАП осуществляет эффективное подавление БРЛС противника (рис. 6) с недопущением снижения эффективности функционирования БРЛС атакующего истребителя (рис. 5), что обеспечивает условия для скрытого самонаведения перехватчиков.
Анализ требуемого информационного обеспечения свидетельствует об отсутствии ограничений на реализацию метода, так как оценки всех переменных, требуемых для расчёта (13), (20), могут быть сформированы на основе измерений, имеющихся на борту атакующего истребителя датчиков.
К особенностям представленного метода следует отнести:
– не рассмотрен вопрос определения минимального интервала между перехватчиками пары, т.е. реализация метода приводит к постоянному сближению перехватчиков, вплоть до их столкновения, однако при введении ограничения на минимальное расстояние между перехватчиками пары, которое может выбираться, например, исходя из безопасности полётов, позволит устранить эту особенность;
– разработанный метод требует высокой эффективности алгоритмов распознавания ввиду применения информации для расчёта w (23), получаемой на основе результатов распознавания воздушных целей.
Список литературы Синтез метода скрытого самонаведения пары перехватчиков на воздушную цель
- Комплексы с беспилотными летательными аппаратами. Кн. 2. Робототехнические комплексы на основе БЛА. Монография. Под ред. В. С. Вербы и Б. Г. Татарского. М., Радио-техника. 2016. 824. [Complexes with unmanned aerial vehicles. Book. 2. Robotic complexes based on an unmanned aerial vehicle. Monograph. Edited. V. S. Verba and B. G. Tatarsky. Moscow, Radio Engineering. 2016. 824. (in Rus.)]
- Меркулов В. И., Савельев А. Н. Радиоэлектронные системы управления истребителей шестого поколения. Ч. 1. Подходы к разработке. Проблемы оптимизации. Успехи современной радиоэлектроники. 2022. 76(8). 5–16. [Merkulov V. I., Saveliev A. N. Radio-electronic control systems of the sixth generation fighters. Part 1. Development approaches. Optimization problems. Successes of modern radio electronics. 2022. 76(8). 5–16. (in Rus.)]
- Закомолдин Д. В., Богданов А. В., Булов В. А. Метод наведения группы истребителей с учётом характера решаемых ими задач. Журнал СФУ. Техника и технологии, 2021, 14(7). 747–762 [Zakomoldin D. V., Bogdanov A. V., Bulov V. A. The method of targeting a group of fighters, taking into account the nature of the tasks they solve. J. Sib. Fed. Univ. Eng. technol., 2021, 14(7). 747–762 (in Rus.)]
- Богданов А. В., Закомолдин Д. В., Булов В. А. Оценка эффективности групповых действий истребителей при совместном наведении атакующих истребителей и истребителей при- крытия. Журнал СФУ. Техника и технологии, 2022, 15(1). 58–69 [Bogdanov A. V., Zakomoldin D. V., Bulov V. A. Evaluation of the effectiveness of group actions of fighters in the joint guidance of attacking fighters and cover fighters. J. Sib. Fed. Univ. Eng. technol., 2022, 15(1). 58–69 (in Rus.)]
- Закомолдин Д. В., Богданов А. В., Булов В.А. Траекторное управление двухпозиционной системой в составе ударного истребителя и истребителя прикрытия, обеспечивающее эффективное решение задач каждым из них. Радиотехника. 2021. 85(9). [Zakomoldin D. V., Bogdanov A. V., Bulov V. A. Trajectory control of a two-position system as part of a strike fighter and a cover fighter, providing an effective solution to the problems of each of them. Radiotekhnika. 2021. 85(9) (in Rus.)]
- Богданов А. В., Коротков С. С., Закомолдин Д. В., Лютиков И. В. Снижение радиолокационной заметности истребителя при работе его бортовой радиолокационной станции на излучение и при ведении противником радиотехнической разведки. Журнал СФУ. Техника и технологии, 2016, 9(3). 442–447 [Bogdanov A. V., Korotkov S. S., Zakomoldin D. V., Lyutikov I. V. Reducing the radar visibility of a fighter when its airborne radar station is operating for radiation and when the enemy conducts electronic intelligence. J. Sib. Fed. Univ. Eng. technol., 2016, 9(3). 442–447 (in Rus.)]
- Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи. Под ред. А. Д. Князева. Вып. 3. Измерение электромагнитных помех и измерительная аппаратура. М., Сов. радио, 1979. [Electromagnetic compatibility of radio electronic means and unintentional interference. Edited by A. D. Knyazev. Issue 3. Measurement of electromagnetic interference and measuring equipment. Moscow, Sov. radio, 1979. (in Rus.)]
- Авиационные системы радиоуправления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза и анализа. Под ред. А. И. Канащенкова и В. И. Меркулова. М., Радиотехника. 2003. 192 [Aircraft radio control systems. T.1. Principles of construction of radio control systems. Fundamentals of synthesis and analysis. Under. edition. A. I. Kanashchenkova and V. I. Merkulov. Moscow, Radio Engineering. 2003. 192 (in Rus.)]
- Системы радиоуправления. Кн. 4. Оптимизация алгоритмов управления. Коллектив. Монография под ред. В. И. Меркулова. М., Радиотехника. 2018. 312. [Radio control systems. Book.
- 4. Optimization of control algorithms. Collective. Monograph edited. V. I. Merkulov. Moscow, Radio Engineering. 2018. 312. (in Rus.)]
- Крутько П. Д. Обратные задачи динамики автоматического управления. Учебное пособие для вузов. М., Машиностроение, 2004. 576 [Krutko P. D. Inverse problems of automatic control dynamics. Series of lectures: Educational. Allowance for universities. Moscow. Mashinostroenie, 2004. 576 (in Rus.)]
- Методы самонаведения истребителей и ракет класса «воздух–воздух» на групповую воздушную цель. Монография. Под ред. А. А. Кучина. Красноярск, Сиб. федер. ун-т, 2014. 168. [Homing methods for fighters and air-to-Air missiles on a group air target: Monograph. Edited. A. A. Kuchina. Krasnoyarsk, Sib. feder. un-t, 2014. 168 (in Rus.)]
- Авиационные системы радиоуправления. Т. 3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. Под ред. А. И. Канащенкова и В. И. Меркулова. М., Радиотехника. 2004. 320 [Aircraft radio control systems. T.3. Command radio control systems. Autonomous and combined guidance systems. Edited. A. I. Kanashchenkova and V. I. Merkulov. Moscow, Radio engineering. 2004. 320 (in Rus.)]
- Малков Н. А., Пудовкин А. П. Электромагнитная совместимость радиоэлектронных средств. Учебное пособие. Тамбов, Государственный технологический университет, 2007. [Malkov N. A., Pudovkin A. P. Electromagnetic compatibility of radio-electronic means, Tutorial. Tambov, State Technological University, 2007. (in Rus.)]
- Богданов А. В., Закомолдин Д. В. Метод наведения пары истребителей с распределением между ними задач подавления и поражения воздушной цели. Радиотехника. 2021. 85(2). [Bogdanov A. V., Zakomoldin D. V. Method of pointing a pair of fighters with the distribution between them of the tasks of suppressing and defeating an air target. Radio Engineering. 2021. 85(2). (in Rus.)]
- Сай П. А. Электромагнитная совместимость радиоэлектронных средств и радио-контроль. Методы оценки эффективности. Монография, 2015. [Sai P. A. Electromagnetic compatibility of radio electronic means and radio control. Methods for assessing effectiveness. Monograph, 2015. (in Rus.)]
- Богданов А. В., Закомолдин Д. В., Докучаев Я. С., Кочетов И. В. Aлгоритм идентификации уводящих по дальности и скорости помех в импульсно-доплеровских РЛС в интересах формирования достоверных оценок дальности и скорости при сопровождении воздушной цели. Журнал СФУ. Техника и технологии, 2019, 12(1). 30–40 [Bogdanov A. V., Zakomoldin D. V., Dokuchaev Ya. S., Kochetov I. V. Algorithm for identification of distance and speed leading interference in pulse Doppler radars in the interests of forming reliable estimates of range and speed when escorting an aerial target. J. Sib. Fed. Univ. Eng. technol., 2019. 12(1). 30–40. (in Rus.)]
- Информационно-измерительные и управляющие радиоэлектронные системы и комплексы. Монография. Под ред. В. С. Вербы. М., Радиотехника, 2020. 490. [Information measuring and control radio electronic systems and complexes. Monograph. Edited V.S Verba. Moscow, Radio engineering. 2020. 490. (in Rus.)]
