Синтез оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект

Автор: С. Г. Козев, Ю. А. Пономарев, В. В. Пятков, А. С. Головачев, А. А. Толмачев
Журнал: Космические аппараты и технологии.
Рубрика: Космические услуги
Статья в выпуске: 3, 2025 года.
Бесплатный доступ
Размещение США оружия в космосе сокращает подлетное время средств поражений до важных стратегических наземных и космических объектов, что, в свою очередь, значительно ограничивает возможности парирования угроз и ответного удара отечественных стратегических ядерных и не ядерных сил. Данный фактор повышает значимость задачи оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект для увеличения точности наведения. Рассмотрен синтез оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект. Цель синтеза – обеспечить допустимые условия захвата космического объекта телевизионной головкой самонаведения за счет выполнения условий квазиколлинеарности векторов скоростей летательного аппарата и космического объекта в момент окончания дальнего наведения. Экспериментальные результаты исследования подтверждают достижение цели. Для определения области перехода наводимого летательного аппарата на самонаведение предложено циклически на небольшие интервалы времени рассчитывать области достижимости целевого объекта по данным внешних измерителей. По рассчитанным областям достижимости аппроксимируется кривая, на которой определяется область перехода наводимого летательного аппарата на самонаведение. Разработанный синтез оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект вносит вклад в развитие существующих методов наведения. В работе впервые применено цикличное построение областей достижимости заатмосферного целевого объекта.
Летательный аппарат, вектор скорости, наведение, оптимальное управление, космический объект
Короткий адрес: https://sciup.org/14134065
IDR: 14134065 | УДК: 517.977.54 | DOI: 10.26732/j.st.2025.3.06
Synthesis of optimal motion control of a guided aircraft on a maneuvering space object
The deployment of U.S. weapons in space reduces the flight time of weapons to important strategic ground and space objects, which in turn significantly limits the ability to counter threats and retaliate with domestic strategic nuclear and non-nuclear forces. This factor increases the importance of the task of optimal control of the guided aircraft's movement towards a maneuvering space object to improve the accuracy of guidance. This article explores the synthesis of optimal control of the guided aircraft's movement towards a maneuvering space object. The purpose of the synthesis is to ensure the acceptable conditions for capturing a space object by a television homing head by fulfilling the conditions of quasi-collinearity of the velocity vectors of the aircraft and the space object at the end of long-range homing. The experimental results of the study confirm the achievement of the goal. To determine the transition area of the guided aircraft to homing.
Текст научной статьи Синтез оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект
Современное состояние международных отношений выдвинуло на передний рубеж актуальную для России и ее союзников военно-политическую проблему – реагирование на возможное размещение США оружия в космосе. На Космическом симпозиуме 11 декабря 2024 года глава Космического командования США генерал Стивен Уайтинг призвал к развертыванию оружия в космосе [1].
Большую угрозу для Российской Федерации составит размещение высокоточного оружия в космосе, которое может быть применено для нанесения ударов как по космическим, так и по наземным стратегическим объектам. Повышается боевая устойчивость средств поражения противника благодаря расширению видов базирования, высот, скоростей их применения, а также возможность совершать маневр.
Размещение вооружения в космосе сокращает подлетное время средств поражений до важных стратегических объектов Российской Федерации, что, в свою очередь, значительно ограничивает
I/ I— ОСМИНЕСКИЕ АППАРАТЫ VI технологии вин время для организации парирования угроз и ответного удара отечественных стратегических ядерных и не ядерных сил до неприемлемого уровня из-за снижения возможностей систем противодействия [2].
Таким образом, в условиях возможного размещения оружия в космосе требуется разработка новых или модернизация существующих средств противодействия, способных эффективно отразить нападение.
Для решения данной задачи предложен синтез оптимального управления движением наводимого 178 летательного аппарата (ЛА) на маневрирующий космический объект (КО) для увеличения точности наведения.
1. Построение области достижимости летательного аппарата
_________________________ № 3 (53) 2О25
Том 9
нат, связанной с его центром масс; g – ускорение силы тяжести; m 0 - начальная масса; m с - секундный расход массы; P – тяга двигательной установки.
В векторно-матричном виде выражение (1) запишется в виде:
dx I dt=F(x(t),a (t)), где: x = [ V, 3, y, x ]T - вектор состояния ЛА в вертикальной плоскости; F = [fV, fθ, fy, fx]T – вектор-функция, определяемая правыми частями выражения (1); α – управление, представленное углом атаки.
Величины углов отклонения двигателей управления и возникающие ввиду этого углы атаки ЛА функционально связаны, поэтому примем за управление угол атаки, который удовлетворяет ограничению:
|а\ < а (2)
Для оценки возможностей по динамике целевого объекта будем использовать цикличное построение областей достижимости. Это необходимо, поскольку методы наведения в упрежденную точку встречи с баллистической целью не могут обеспечить необходимую точность поражения, так как для маневрирующих целей невозможно рассчитать такую точку встречи ввиду отличия закона движения цели от баллистического (эллиптического) [3].
В работе [5] предложен метод расчета такой области для аэродинамической цели на конечном этапе телеуправления без работающей двигательной установки.
Рассмотрим аналогичным образом для вертикальной плоскости полета построение областей достижимости маневрирующей цели на заатмос-ферном участке при работающей её двигательной установке. Для горизонтальной плоскости задача
Задано начальное положение ЛА:
1 0 = 0, V (0) = V o , 0 (0) = 0 0 , У (0) = y 0 , X (0) = X o . (3)
Задан момент θ, на который рассчитывается область достижимости ЛА.
Областью достижимости (ОД) управляемой системы (1) в k -мерном пространстве { x 1 x 2 x 3 ... x k} ( k < n ) из начального состояния (3) в момент времени & ( £ > 1 0) при ограничении на управлении (2) называется множество G ( 1 0, x 0, U , & ) тех и только тех точек q = { x 1 ( & ), x 2( & ),..., x q( & ),}, в которые можно перевести систему из начального состояния х 0 в момент времени & за счет выбора функции управления u ( t ) = а (t) , удовлетворяющей заданным ограничениям [5].
Здесь U – множество функций управления, α – угол атаки, l – единичный вектор, направление которого определятся углом ξ1 между вектором l и осью OX определяется.
решается аналогично.
Движение целевого объекта на заатмосферном участке в вертикальной плоскости с работающим двигателем определяется следующей системой дифференциальных уравнений [7]:
dV dt
P
( m 0 - m c t )
- g sin( ^ )
d 0 dt
P a
( m o - m c t) V )
- g cos( 0 )I V
dx
— = V cos( 0 ) dt
d=V sin( 0 )
где V – скорость; θ – угол наклона траектории; x (дальность) и у (высота) - координаты местоположения ЛА в неподвижной системе коорди-
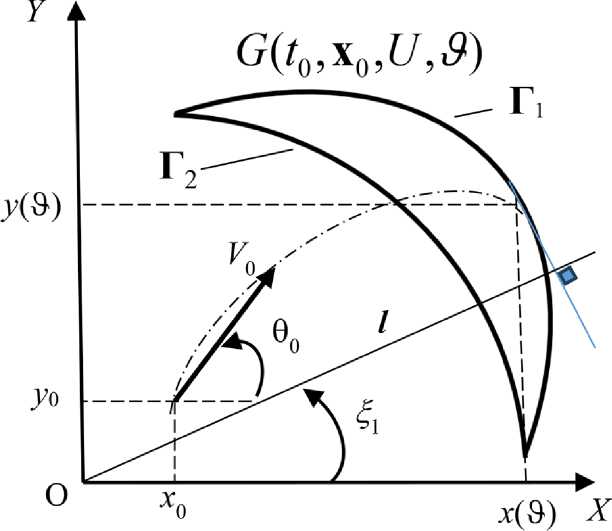
Рисунок 1. Область достижимости летательного аппарата
ОД ЛА в плоскости ограничена двумя кривыми Г1 – выпуклая часть границы, Г2 – вогнутая часть границы.
Для расчета точек на выпуклой части границы ОД решается следующая задача оптимального управления.
Требуется найти порядок изменения угла атаки α( t ), обеспечивающей максимальное смещение ЛА из начальной позиции ( V 0 , 0О, x 0, y 0, m о , m с, R ) в вертикальной плоскости в направлении единичного вектора l в момент времени ϑ при выполнении условий (2).
Для решения задачи по аналогии с [5] используем принцип максимума Понтрягина. Принцип утверждает существование вектор-функции Ψ( t ), являющейся решением системы уравнений:
d„ / dt = -дH / дx, где H (t, x (t),„ (t), й( t)) = у т F - функция
Гамильтона, и ( t ) - оптимальное управление.
Систему уравнений d x
F ( t , x , u )
. „ _jjh j dt ax
H ( t , x ( t ), „ ( t ), й ( t )) = max „ ( t ) , U H ( t , x ( t ), „ ( t ), u ( t))
называют п-системой. Решение п-системы является решением задачи оптимального управления.
Выпуклая граница ОД ЛА строится по точкам посредством последовательного задания углов ξ1 и решения задачи о максимальном смещении ЛА вдоль заданного вектора l направления. То есть требуется максимизировать скорость ЛА в заданный момент ϑ при его выведении по направлению вектора l .
Показатель оптимальности в данном случае будет иметь вид:
J = V ( , (4)
Для использования традиционной формы принципа максимума вместо максимизации скорости в момент д будем искать минимум следующего функционала J 1 = - V ( д ), что, очевидно, равнозначно.
Функция Гамильтона для системы (1) с терминальным критерием имеет вид:
R R a
H = -„v------- -„ v g sin ( 0 ) „ 7------ -
2 m c t ( m 0 - m c t ) V
„ gcoVJL+yVsin(0)+„XVcos(0).
Составим сопряженную систему уравнений:
^
d „ д H
-=- =--= „ dt д V 06
R a
7------ A—„ - „ 0
( m 0 - m c t ) V
g cos ( 0 )
—-^ - „ y sin 0 - „ cos 0 ;
V 2 y
„ _JJ H _—, g sin 0 d,- s 0- 0 V
„ dt
„ dt
+ „ Vg cos 0 - „ yVcos 0 + „ xVsin 0 ;
-
dH = 0; sx ah M
_ 0
Рассмотрим условия трансверсальности для фиксированного момента ϑ :
где
I/ - J—
ОСМИЧЕСКИЕАППАРАТЫ И
технологи и^нв
Том 9
Это условие в развернутом виде имеет вид:
[-1+¥г (»№+^ (,) зе, + v у (э)8уа +
+ ^ , ( , ) З х а = 0.
Так как при t = ϑ фазовые координаты V , θ , γ , χ могут принимать любые значения, то в силу независимости вариаций δV ϑ, δθ ϑ, δγ ϑ, δχ ϑ получаем следующие граничные условия для фазовых координат сопряженной системы:
a*( t ) = We
R
( m 0 _ met ) V
к ( ^ ) = 1; w e ( ^ ) = 1; К х И = о; V , И = 0;
Систему (5) с учетом (6) представим в виде:
dw
— = ^ ( t , w, v , a ) , dt
гдe ¥ =
wv
W e J
r^v (t. w,va)] , ^t, w,w,a =
, ^ ) | % ( t,w, w , a ) J
;
к (t, wwa) = We
___Ra__
( m о - mJ ) V 2
_ g cos ( e ) ;
W" V2
g sin e
, e ( t , w w , « W e — ^wv g cos e
Согласно принципу максимума функция Гам ильтона должна при оптимальном управлении достигать максимума. Причем управление α( t ) должно удовлетворять ограничению (2) [6].
Функцию Гамильтона представим в следующем виде:
н=н о + H , a .
где
Н- К . -R- _ , . g sin e Vw, g =®.
- m R
“ ' = Г " ( m. - mg ) V
Функц ия H до стигает максимума при сле дующих значениях управления:
Режим особого управления возникает при ψ θ = 0, в этом случае режим особого управления должен продолжаться до окончания управления движения. Но в момент 3 в систему граничных условий ψ v ≠ 0, поэтому режим особого управления в данной задаче не может появиться.
Таким образом, π-система в данном случае включает системы уравнений (1). (7) и соотношения выбора оптимального управления (8), π-система удовлетворяет начальным и граничным условиям и условиям (6).
Для решения краевой задачи могут быть использованы различные известные методы динамического программирования, например, как в [5], модифицированный метод Ньютона. Задаваясь различными углами ^ ориентации вектора l . соединяя полученные точки. можно получить выпуклую границу Г 1 ОД ЛА. Крайние точки границы можно получить. выбрав управление с неизменным в течение полета максимально допустимым управлением ±αдоп. [8]
Вогнутую границу Г 2 ОД ЛА можно построить также по точкам аналогично Г 1, решая задачу о минимальном смещении ЛА в заданном направлении.
Программная реализация вышеуказанного алгоритма. позволяющая построить области достижимости заатмосферного ЛА. показывает зависимости величины ОД от скорости и массы ЛА при фиксированном угле атаки α. На рисунке 2 показан результат построения ОД для различных значений модуля вектора скорости: 1 км/с, 3 км/с, 5 км/с, 7 км/с при фиксированных остальных значениях.
2. Построение графиков вектора состояния целевого объекта
Для вычисления координат точки наведения проинтегрируем систему уравнений (1) в программной среде Mathlab . тем самым получим изменение вектора состояния ЛА на заданный промежуток времени в зависимости от выбора характе ристик ЛА с постоянным углом атаки.
Для расчета скорости целевого объекта воспользуемся следующим выражением:
О доп'
/^^
a ( t ) =
-а доп'
если H > 0;
если Н < 0;
режим особого управления, если Н = 0,
Отк уда
d Н
da
= 0.
. *
К
0 ^ R 3 +Н ц ) .
где V 0 - начальная скорость ЛА. k - гравитационная постоянная, R з – радиус Земли, Hц – высота орбиты.
Тогда. предполагая высоту орбиты 500 км. начальная скорость участка маневрирования будет
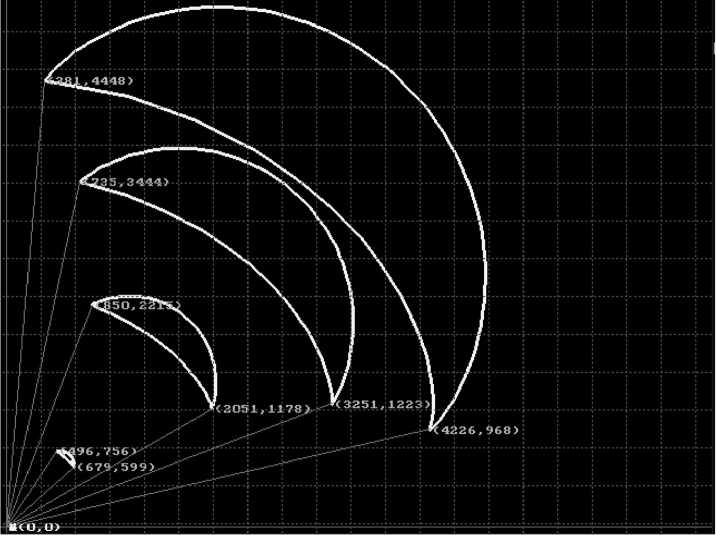
Рисунок 2. Области достижимости ЛА при увеличении модуля вектора скорости при фиксированном значении угла атаки
равна V 0 = 7,61 км/с. P = 5000 Н, m 0 = 2000 кг, m с = 3 кг/с, g = 9.8 м/с2, t = [1.20] с, a = 10 о , 0 0 = 0.
Подставив данные значения в начальные условия, получим изменение вектора-состояния при постоянном угле атаки (рисунок 3).
Исходя из графиков на рисунке 3 видно, что точка прицеливания сместилась в вертикальной плоскости на 2 км, скорость увеличилась на 0,046 км/с, угол наклона вектора скорости относительно касательной – на 0,025 рад (1,5о).
Заключение
Для повышения точности наведения летательных аппаратов на конечном участке необходимо применять методы самонаведения, из которых наиболее часто применяемым на практике является метод пропорциональной навигации [10]. При этом важным условием реализации метода является задание необходимых начальных условий, определяемых конеч-
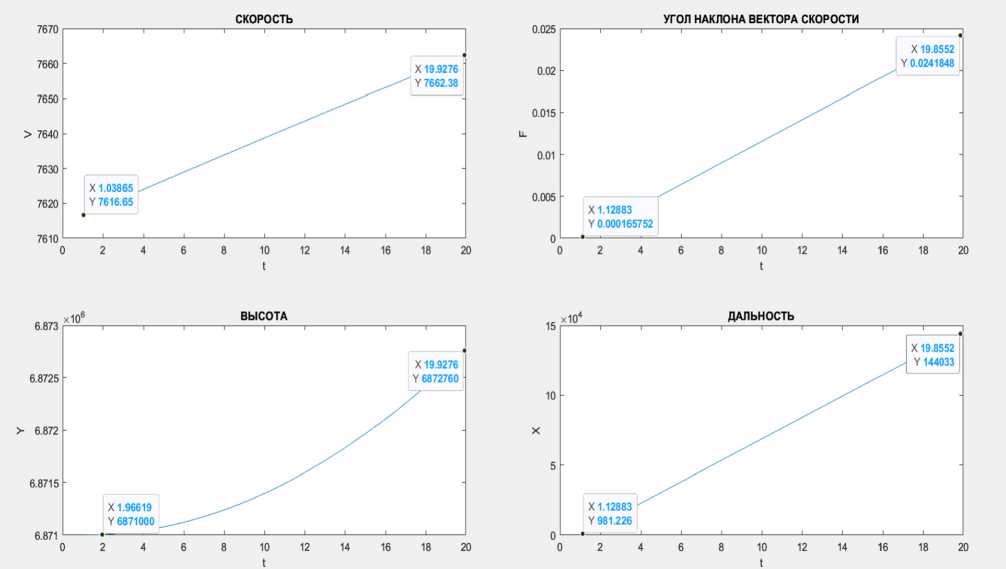
Рисунок 3. Изменение параметров вектора-состояния летательного аппарата за 20 секунд
АППАРАТЫ VI технологи ш^ин
ными параметрами предшествующего дальнего наведения.
Предложенный алгоритм синтеза оптимального управления на основе принципа Л. С. Понтрягина, рассмотренный на примере управления движением наводимого ЛА в плоскости тангажа при заданных времени полёта, конечных координатах, величине и ориентации его вектора скорости, обеспечивает минимизацию заданного критерия качества [11].
Найденный результат решения задачи оптимального управления полётом наводимого лета- 182 тельного аппарата и космического объекта наведе-
Том 9
ния заключается в определении наиболее выгодных условий для начала этапа самонаведения с использованием оптико-электронных систем. Установлено, что одно из наиболее важных условий для начала реализации метода пропорциональной навигации – обеспечение ориентации векторов скоростей ЛА и КО по их линии визирования [9].
Дальнейшим направлением исследований является синтез управления летательным аппаратом с переменным профилем тяги двигательной установки, позволяющий осуществлять поиск оптимального управления на отдельных временных участках его полёта.
Список литературы Синтез оптимального управления движением наводимого летательного аппарата на маневрирующий космический объект
- The US needs ‘weapons in space,’ SPACECOM head says // DefenseOne. [Электронный ресурс]. URL: https://www.defenseone.com/theeats/2025/04/us- needs- weapons- space- spacecom- head- says/404393 (дата обращения: 29.06.2025).
- Лопин Г. А., Цурков М. Л., Оглобин В. В. Угрожающая перспектива // Воздушно- космическая оборона. 2011. № 6. [Электронный ресурс]. URL: http://www.vko.ru/koncepcii/ugrozhayushchaya- perspektiva (дата обращения: 11.05.2025).
- Дунаев С. М. Анализ особенностей применения инерциального метода наведения по мгновенному промаху на участке разгона ЛА и КО с нестабильными летно- техническими характеристиками // Успехи современной радиоэлектроники. 2014. № 3. С. 20–26.
- Теория и практика космического телевидения / А. А. Умбиталиев, А. К. Цыцулин, Г. В. Левко и др. СПб.: АО «НИИ телевидения». 2017. 368 с.
- Толпегин О. А. Области достижимости летательных аппаратов: учебное пособие; изд. 2-е, исп. и доп. СПб.: Балт. гос. техн. ун- т. 2013. 141 с.
- Иванов Н. М., Лысенко Л. Н. Баллистика и навигация космических аппаратов. М.: Дрофа. 2004. 345 с.
- Иванюхин А. В., Петухов В. Г. Задача минимизации тяги и ее приложения // Космические исследования. 2015. Т. 53, № 4. С. 320–331.
- Теория и практика космического телевидения / А. А. Умбиталиев, А. К. Цыцулин, В. В. Пятков и др. Под ред. А. А. Умбиталиева, А. К. Цыцулина. СПб.: НИИ телевидения. 2017. 386 с.
- Умбиталиев А. А., Цыцулин А. К., Пятков В. В. и др. Оптико- электронная система измерений координат объектов с адаптацией параметров разложения // Измерительная техника. 2017. № 4. С. 42–46.
- Пятков В. В., Васильев П. В. Оценка вероятности попадания заатмосферного летательного аппарата с бортовым оптико- электронным координатором в заданную область // Вопросы радиоэлектроники. Серия Техника телевидения. 2015. Вып. 6. С. 126–127.
- Пятков В. В., Козев С. Г. Способ численного решения задачи наведения летательного аппарата с заданными конечными условиями его динамики // Вопросы радиоэлектроники. Серия Техника телевидения. 2025. Вып. 1. С. 32–38.
