Синтез оптимального управления квантомеханической системой

Автор: Гурман Владимир Иосифович, Блинов Александр Олегович
Журнал: Программные системы: теория и приложения @programmnye-sistemy
Статья в выпуске: 1 (5) т.2, 2011 года.
Бесплатный доступ
В работе рассматривается задача неограниченного оптимального управления колебательной системой, представляемой известной квантомеханической моделью ЛандауЗинера. Эта задача вырождена и имеет семейство магистральных решений, которое находится согласно теории путем преобразования к производной задаче меньшего порядка. Оно задает синтез оптимального управления в производной задаче и далее — приближенный синтез с любой точностью в исходной задаче.
Оптимизация, вырожденные задачи, магистрали, синтез управления, импульсные режимы, периодические процессы, глобальное улучшение
Короткий адрес: https://sciup.org/14335899
IDR: 14335899 | УДК: 517.977
The optimal control synthesis for quantummechanical system
It is consider the unbounded optimal control problem of oscillating system which represents the wellknown LandauZener quantum mechanical model. This problem is degenerate and has a family of turnpike solutions, which can be constructed according to the theory by converting to the derived problem of lower order. This family specifies the synthesis of optimal control in the derived problem and then the approximate synthesis with any accuracy in the original problem.
Текст научной статьи Синтез оптимального управления квантомеханической системой
Многие математические задачи оптимизации систем с линейными управлениями относятся к классу вырожденных задач оптимального управления [1] , которые характеризуются присутствием явных или скрытых пассивных дифференциальных связей или дискретных цепочек. Их исключение, упрощая задачу, понижая ее порядок, не меняет искомого решения. Соответствующая ему траектория оказывается магистралью , т. е. инвариантной относительно всех или части граничных условий. Магистральное решение может быть в точности искомым оптимальным, либо использоваться как эффективное начальное приближение в той или иной итерационной процедуре оптимизации. Такие решения характерны для многих приложений [1 –4] . В [4, 5] систематически исследуются вырожденные задачи оптимального управления линейной колебательной системой и достаточно общей периодической системой на неограниченном промежутке времени.
В данной статье процедуры, представленные в [4 , 5] , применяются к поиску магистральных решений характерной задачи того же класса на известной квантомеханической модели Ландау-Зинера [6] , которая
Работа выполнена при финансовой поддержке РФФИ (проект 09-01-00170-а).
представляет самостоятельный интерес и также рассматривается как прототип значительно более сложных задач этого класса, решаемых весьма перспективным методом нелокального (глобального) улучшения управления [7 –10] .
-
1. Постановка задачи
Рассматривается следующая модель управляемой системы 4,3-2 3 4
z = wz + uz , z = wz — uz ,
-
(1) z 3 = — wz1 — uz 1 , z 4 = — wz 1 + uz 2 ,
-
2. Решение задачи
которая представляет в действительных переменных содержательную модель Ландау-Зинера, описывающую 2-спиновую систему в терминах уравнения Шредингера в комплексных переменных [6] .
Здесь u –– управление, которое принимается неограниченным, ω–– константа, аргументом служит «замедленное время» t = ~т , где т — физическое время, ~ –– постоянная Планка. Особенность этой системы, как показано в [8] ,—наличие инварианта | z | 2 = C . Ставится следующая задача оптимального управления:
t G [0,t F ], z(0) = z i , I = F(z(t F )) ^ inf, F (z) = C — (z T z * ) 2 , z ∗ –– некоторое заданное состояние.
Нетрудно видеть, что соответствующая (1) предельная система [2] представляет собой совокупность двух осцилляторов одинаковой частоты dz1/dT = z3, dz^/dT = —z1,
dz2/dT = —z4, dz4/dT = z2, и имеет 3 первых интеграла [4]
y 1 = (z 1 ) 2 + (z 3 ) 2 , y 2 = (z 2 ) 2 + (z 4 ) 2 , y 3
(два интеграла энергии и фазовый сдвиг), из которых с учетом инварианта независимы лишь два, так что имеют место следующие об- ратимые соотношения:
z1 = Vy1 cos ^, z3 = Vy1 sin 6, z"2 = Vy1 sin(6 + y3), z4 = yfy1 cos(6 + y3), y1 + y2 = C, где θ — угловая координата точки z на интегральной траектории.
В соответствии с теорией [2] перейдем к эквивалентной производной задаче, уравнения которой получаются подстановкой выражений (3) в исходную систему (1) с учетом ее инварианта (в новых переменных):
-
(4) y 1 = 2wpy 1 (C - y 1 ) cos(29 + y 3 ) = f 1 (y 1 ,9,y 3 ), t G [0,t F ],
C
-
(5) y 3 = ш , sin(29 + y 3 ) = f 3 (y 1 ,9,y 3 ),
y 1 ( C - y 1 )
У 1 (0) = y | , У 3 (0) = y 3 , F(y(t F )) ^ inf, F(y) = min F (z(y,9) .
θ
Особенность задачи, как и всех задач с терминальным функционалом, в том, что регулярное решение уравнения Беллмана располагается вне области достижимости точки абсолютного минимума функции F (y), которая в данном случае определяется на упомянутом инварианте как z = z * (y 1 , y 3 ,9 * ) в новых переменных. В пределах области достижимости управление, очевидно, может быть задано произвольно. Таким образом рассматриваемая задача синтеза разбивается на две:
-
1. Синтез оптимального управления 9 (t,y1,y 3 ^ в задаче быстродействия –– наискорейшего попадания в заданную точку (в данном случае y ∗ ) и одновременное построение области достижимости этой точки с помощью уравнения Беллмана
max(^ y i f 1 + ф у з f 3 ) = 1.
θ
Конкретно,
-
(6) У(ф у 1 g 1 ) 2 + (ф у з g 3 ) 2 = 1,
-
2. Cинтез оптимального управления, минимизирующего функционал F(y t F ) путем решения задачи Коши
где g 1 =2^py 1 ( C - y 1 ), g 3 = ^ v y i ( C -y i ) .
-
(7) v t = У (ф у 1 д 1)2 + (ф у з g 3 ) 2 , ^ t F ,у = -F (y).
Эти задачи решаются методом характеристик в области регулярности 0 < y1 < C, —п/2 < y3 < п/2 (при y1 = 0, y1 = C имеет место сингулярность) с использованием следующих известных уравнений [7]
-
(8) y 1 = H p i , y 3 = H p 3 , p 1 = —H y i , p 3 = —H y 3 ,
где
H (y 1 ,y 3 ,p 1 ,p 3 ) = max h = Р(р 1 д 1 (у 1 )) 2 + (p 3 g 3 (y 1 )) 2 , θ
9(t F , • ) = arg min F(z(y, 9)). θ
Заметим, что H фактически от y 3 не зависит, так что из (8) следует, что p 3 = const.
Уравнения (8) , как известно, совпадают с уравнениями принципа максимума Понтрягина, записанными в терминах гамильтониана (1) .
Если семейство характеристик окажется регулярным в указанной области, то это будет говорить о его оптимальности. В задаче 1 (быстродействия для автономной системы 2-го порядка) это условие регулярности проверяется непосредственно путем построения фазового портрета системы, замкнутой оптимальным позиционным управлением (9) :
-
(9) arg max H = 9 : cos(29 + y 3 ) = X 1 , sin(29 + y 3 ) = X 3 ,
9(t F , • ) = argmin F(z(y,9)), х з = P 3 g 3 , X i = P 1 g 1 , θ
H y 1 = H 1 ( X 1 y i X 1 + X 3 y i х з ) , H y 3 = H 1 ( - X 1 X 3 + X 3 X 1 ) .
В задаче 2 (синтеза вне области достижимости) проверка регулярности требует более сложных построений, которые здесь рассматривать не будем. Ограничимся задачей 1. Ее решение и одновременно построение границы области достижимости сводится, как известно, к интегрированию системы (8) для различных p F : | p F | = 1, Pf : I p F | = 1,i = 1,2 и построению семейства траекторий (фазового портрета) на плоскости ( y 1 , y 3 ).
Случай, когда y(C — у) = 0, требует специального рассмотрения. Исключив из системы (3) уравнение относительно y3 , будем иметь вторую производную задачу (первого порядка), где y3 играет роль управления. Эта задача решается непосредственно. Строятся границы области достижимости из начальной точки, которые получаются, как ее решения при cos(29 + у3) = ±1, t Е [tI,tF).
Заданная конечная точка проектируется на одну из этих границ. Соответствующий этой проекции момент t F и будет минимальным. Полученное решение удовлетворяет системе (2) в целом при у 3 = const и будет оптимальным для этой системы если у 3 = y F .
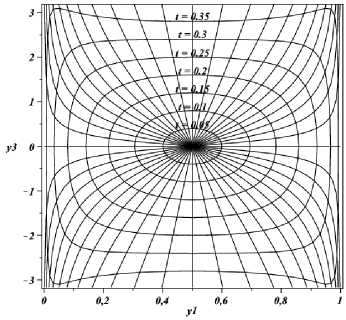
Рис. 1.
Обратим внимание, что уравнение (4) сингулярно на многообразиях у 1 = 0 и у 1 = C ; на этих многообразиях у 3 может быть выбрано произвольно независимо от решения на примыкающем интервале. Получающееся при этом разрывное решение реализуется как импульсное в точке разрыва последовательностью непрерывных с большим ростом производной у 3 . Отсюда следует, что если начальная или конечная точка задана на одном из этих многообразий, то полученное решение будет точным магистральным решением первой производной задачи. В итоге получается оптимальный синтез во всей замкнутой области 0 < у 1 < C, — п/2 < у 3 < п/2.
Проиллюстрируем эти построения расчетами для двух заданных конечных точек, первая из которых выбрана из соображений симметрии, вторая соответствует примеру из работы [6] (в обоих случаях C = 1):
1)у 1 = 0.5, у 3 = 0, 2)у 1 = 0.45, у 3 = 0.28.
Расчеты выполнялись в системе Maple 12, с помощью функции Phaseportrait(). Результаты (полученные полностью в аналитическом виде ) представлены на рис. 1 –5 .
На рис. 1 –2 представлены фазовые портреты синтезированных систем. Видно, что построенное семейство характеристик регулярно всюду в рассматриваемой области, за исключением точки y ∗ (фокуса), так что в этой области задан оптимальный синтез управления
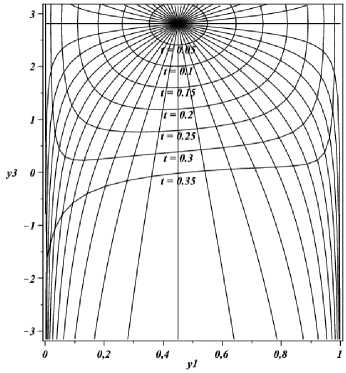
Рис. 2.
У(y 1 , y 3 ), определяемый формулами (9) , где p 1 ,p 3 — функции (y 1 ,y 3 ) со значениями, получаемыми в процессе расчета характеристик.
На рис. 1 , кроме того, нанесены линии уровня t min = const , описывающие границу области достижимости, а на рис. 3 представлено пространственное изображение этой области.
На рис. 3 показаны множества достижимости для различных конечных точек (включая выбранные) в случае сингулярности y 1 (1 — у 1 ) = 0.
Таким образом, построен синтез оптимального управления в производной задаче, который задает оптимальный синтез и в исходной в форме последовательности управлений с обратной связью u(t, z) либо u(t,y,y) в новых переменных (что более удобно), с неограниченно растущими значениями управления в окрестностях точек разрыва y(t, у). Она строится по общему правилу [9] , а именно, следующим образом. Графиком 6(t,y) служит некоторое многообразие в пространстве (t, y, У), S * , которое назовем магистральным. Зададим (1/s)-окрестность S * ((1/s)-слой):
G ( S * , 1/s) = { (t,y,y): | У — У * (t,y) | < 1/s } .
При (t, У) е G ( S * , 1/s) полагаем u s = u * . В противном случае находится точка (t, y, У * ) на S * , такая, что при данном t точки (y, У * ) и
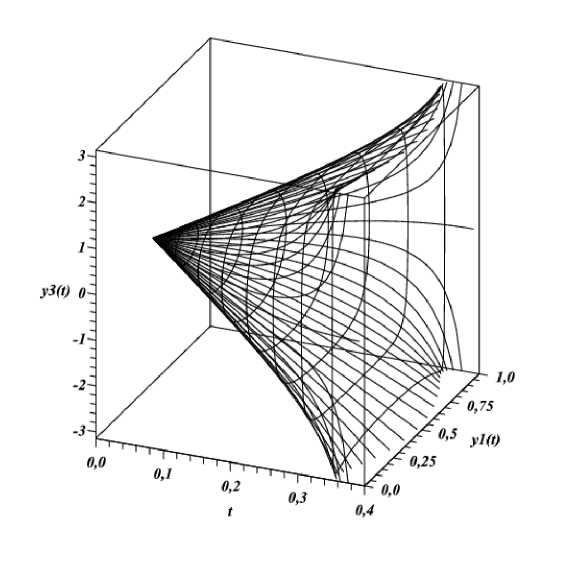
Рис. 3.
(y, 6) соединяет некоторая траектория регулярной предельной системы, то есть (2) . Далее эта траектория аппроксимируется последовательностью решений системы (1) , начинающихся из точки z . Соответствующее значение управления u s (t + 0, z) и принимается в качестве u s (t, z).
В целом последовательность функций { u s (t,x) } задает в рассматриваемой области синтез оптимального управления с любой степенью точности при достаточно большом s . Несмотря на некоторую громоздкость описанной конструкции u s (t, x), она отражает достаточно простое и наглядное правило: из любой точки (t, x), не лежащей на магистральном многообразии S ∗ , следует перемещаться с
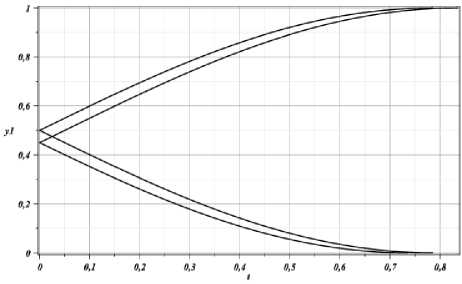
Рис. 4.
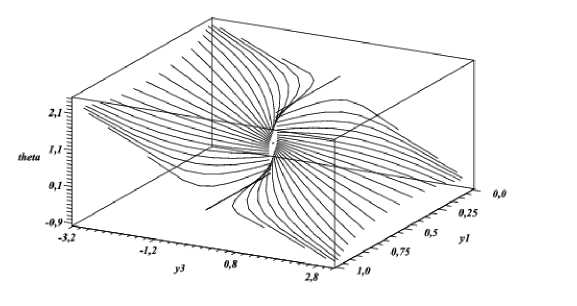
Рис. 5.
большой скоростью (в пределе — мгновенно, скачком) на это многообразие, по траектории, близкой к траектории предельной системы, а в (1/s)-okpecTHOcmu магистральной поверхности применять управление u * (t, z).
Заключение
Таким образом, полностью решена задача синтеза оптимального по быстродействию неограниченного управления на модели Ландау-
Зинера. Благодаря специфике модели эта задача четвертого порядка сводится к эквивалентной производной задаче второго порядка, а для сингулярных начальных условий –– к производной задаче первого порядка. Решение производных задач определяется точно в форме фазового портрета семейства магистральных решений, которые в исходном пространстве разрывны в граничных точках. Оно рассматривается как обобщенное решение импульсного типа исходной задачи и аппроксимируется последовательностью исходных позиционных управлений, неограниченно растущих в окрестностях точек разрыва.
Обратим внимание, что несмотря на неограниченность скоростей в исходной системе (1) , время ее перехода из одного состояния в другое заведомо не нулевое, в отличие, например от системы х 1 = х 2 , х 1 = и, когда управление не ограничено. Это — фундаментальное свойство рассматриваемой модели как управляемой системы осцилляторов, как и более сложных моделей этого класса, так что определение минимального времени перехода имеет глубокий физический смысл.
Список литературы Синтез оптимального управления квантомеханической системой
- Гурман В. И. Вырожденные задачи оптимального управления. Москва: Наука, 1977. -304 c.
- Гурман В. И. Принцип расширения в задачах управления. Москва: Наука. Физматлит, 1985, 1997. -288 c.
- Кротов В. Ф., Гурман В. И. Методы и задачи оптимального управления. Москва: Наука, 1973. -446 c.
- Гурман В. И., Знаменская Л. Н. Управление колебаниями при ограниченном ресурсе управления//Изв. РАН. Теория и системы управления, 2001, № 1, c. 41-49.
- Гурман В. И., Ухин М. Ю. Синтез оптимального управления периодическими процессами при неограниченном времени//Автоматика и телемеханика, 2007, № 2, c. 17-25.
- Caneva T., Murphy M., Calarco T., Montangero S., Giovannetti V., Santoro G. E. Optimal control at the quantum speed limit//Phys. Rev. Lett. 103, 240501, 2009, http://arxiv.org/abs/0902.4193v2.
- Кротов В. Ф. Управление квантовыми системами и некоторые идеи теории оптимального управления//Автоматика и телемеханика, 2009, № 3, c. 15-23.
- Батурина О. В., Булатов А. В., Кротов В. Ф. К оптимизации линейных систем с управляемыми коэффициентами//Автоматика и телемеханика, 2011 (в печати).
- Гурман В. И., Ухин М. Ю. Синтез оптимального управления в системах с неoграниченным множеством скоростей//Дифференциальные уравнения, 2005. 49, № 11, c. 1482-1490.
- Трушкова Е. А. Алгоритмы глобального улучшения управления//Автоматика и телемеханика, 2011 (в печати)
