Синтез повышающего преобразователя для имитатора нагрузок систем электроснабжения автономных объектов

Автор: Юдинцев Антон Геннадьевич, Ткаченко Александр Александрович, Ляпунов Данил Юрьевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Преобразовательная техника
Статья в выпуске: 3 т.20, 2020 года.
Бесплатный доступ
Статья посвящена синтезу повышающего преобразователя для имитатора, предназначенного для формирования нагрузок систем электроснабжения автономных объектов на основании математического описания преобразователя в виде системы дифференциальных уравнений. Выведены уравнения, позволяющие построить модель повышающего преобразователя, совмещающую силовую часть и систему управления и предназначенную для описания электромагнитных и информационных процессов в устройстве и применения в составе системы управления в качестве цифрового модуля. Модель преобразователя реализована в среде MATLAB Simulink в виде структурной схемы и может быть использована как непрерывная усреднённая, так и дискретная в зависимости от подаваемого на её вход управляющего сигнала - непрерывного или импульсного периодического с определённым значением скважности импульсов. Непрерывная усреднённая модель применяется для цифрового синтеза преобразователя, а дискретная - для проверки и испытаний повышающего преобразователя имитатора нагрузки. На основании построенной структурной схемы выведена передаточная функция преобразователя по его входному току с переменными параметрами, зависящими от скважности. Разработанный повышающий преобразователь обеспечивает ток нагрузки до 360 А с коэффициентом пульсаций входного тока, не превышающим 0,6 %. Результаты исследований могут представлять интерес для специалистов в области силовой электроники, систем электроснабжения автономных объектов и систем управления.
Имитатор нагрузки, повышающий преобразователь, усреднённая модель, дискретная модель, система электроснабжения, проектирование, структурная схема, цифровой синтез, цифровой модуль
Короткий адрес: https://sciup.org/147234070
IDR: 147234070 | УДК: 621.314 | DOI: 10.14529/power200309
Synthesis of a boost converter for a load simulator of autonomous objects power supply systems
The paper deals with the synthesis of a boost converter for a simulator designed to form loads of power supply systems of autonomous objects based on the converter mathematical description in the form of a differential equations system. Equations that allow building a model of a boost converter that combines the power part and the control system are derived. This model describes the electromagnetic and information processes within the device and is implemented as a digital module within the control system of the converter. A block diagram of the model in MATLAB Simulink can be implemented as both continuous averaged and discrete. This depends on the control signal applied to the model input, i.e. continuous or pulse periodic with duty ratio D. The continuous averaged model is used for the digital synthesis of the converter, whereas discrete is employed to test the boost converter of the load simulator. A current transfer function of the converter with variable parameters depending on the duty ratio is derived. The developed boost converter provides the load current of up to 360 A. The ripple coefficient of the input current is under 0,6 %. The research results may be of interest to specialists in the field of power electronics, power supply systems of autonomous objects and control systems.
Текст научной статьи Синтез повышающего преобразователя для имитатора нагрузок систем электроснабжения автономных объектов
В настоящее время идея наземных испытаний автономных объектов является настоятельной необходимостью успешного проектирования электротехнических комплексов различного назначения. В статье [1] описана методика синтеза имитатора нагрузки (ИН) для наземных испытаний систем электроснабжения (СЭС) автономных объектов на базе модуля повышающих преобразователей напряжения для формирования тока нагрузки электротехнического комплекса. Синтез осуществляется с использованием программной среды MATLAB Simulink с учётом разброса параметров компонентов.
Рассматриваемая идея позволяет перейти от простого конструирования электротехнического комплекса к его синтезу, который предполагает наличие базовых цифровых модулей комплекса, собираемых поэтапно в изделие. Подобная идея описывается в статье [2], где применительно к топливным ячейкам предлагается алгоритм управления потоками энергии посредством многофазных сборок из повышающих преобразователей, моделируемых цифровыми модулями, и выводятся передаточные функции для контуров регулирования. Таким образом, цифровые модули позволяют не только исследовать характеристики ИН, но и разрабатывать алгоритмы их управления. В коллективной монографии [3] предлагается использовать современные методы искусственного интеллекта и машинного обучения для создания алгоритма управления солнечной батареи, содержащей на выходе повышающий преобразователь. Однако в рассматриваемом алгоритме не задействована структура преобразователя, что внесло бы значительный вклад в синтез структуры системы управления фотоэлектрическим комплексом. Применительно к ИН для его качественного синтеза необходимо детальное математическое описание силовых частей и систем управления преобразователями. Кроме того, в процессе тестирования и приёмо-сдаточных испытаний возникает необходимость быстрой и качественной проверки готового к работе электротехнического комплекса. Решени-
380 В
50 Гц
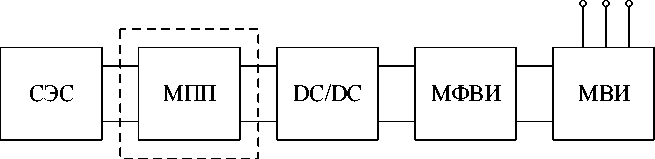
Рис. 1. Функциональная схема силового канала имитатора нагрузки силового канала: СЭС – система электроснабжения; МПП – модуль повышающих преобразователей, содержащий n параллельно соединённых устройств; DC/DC – модуль преобразователей постоянного напряжения на базе автономных инверторов напряжения и выпрямителей, содержащий m преобразователей; МФВИ – модуль фильтра ведомого инвертора; МВИ – модуль ведомого инвертора, подключенный к сети 380 В, 50 Гц
ем данной задачи является сопоставление характеристик комплекса и его математической модели в процессе испытаний. Современные средства контроля, измерения, диагностики систем электроснабжения освещены в [4], где также предлагается применение цифровых модулей, созданных в среде MATLAB Simulink для проверки правильности функционирования электротехнических комплексов. Кроме того, синтезированные цифровые модули могут входить в состав единого информационного обеспечения электротехнических комплексов [5], позволяющих не только проводить испытания устройств, но и измерять их координаты без использования датчиков. В анализируемой статье безредукторный электромехатронный преобразователь и его компьютерная модель задействованы в структуре бессенсорного информационного обеспечения, что значительно облегчает синтез системы управления преобразователем. Получение координат устройства косвенным методом исключает применение датчиков и интерфейсов.
Все вышеперечисленные преимущества использования математического описания и созданных на его основе моделей могут быть применены для эффективного цифрового синтеза повышающего преобразователя ИН, являющегося ключевым элементом при формировании тока нагрузки.
Также необходимо учесть, что в разработке ИН принимает участие ряд специалистов разных специальностей, использующих различные подходы к математическому описанию физических и информационных процессов проектируемых комплексов. В статье [6] предлагается методика так называемого междисциплинарного проектирования (cross-cutting design), что позволяет эффективно организовывать непрерывную коллективную работу над одним проектом в области силовой электроники с использованием нескольких моделей явлений (тепловых, электромагнитных, механических), происходящих в проектируемом устройстве. Аналогично мы предлагаем в процессе разработки преобразователей учитывать несколько подходов к моделированию компонентов комплекса, включая представление компонента в виде системы дифференциальных уравнений в пространстве состояний, операторных уравнений, структурной схемы.
На основании анализа известных схем ИН авторами был создан, спроектирован и реализован ИН (рис. 1) для наземной отработки электротехнических комплексов различного назначения [1]. Штриховой линией обведён исследуемый в данной статье объект.
Объектом испытаний является СЭС, предназначенная для питания бортового оборудования наземного, космического и подводного базирования, мощностью не более 10 кВт. Для формирования тока нагрузки, не превышающего 360 А, используется МПП. Преобразователь DC/DC согласует уровни напряжений для обеспечения эффективного инвертирования. С целью сглаживания пульсаций выходного напряжения DC/DC-преоб-разователя используется МФВИ, представляющий собой Г-образный LC -фильтр, который является входным для МВИ, построенного на базе трёхфазного мостового ведомого сетью инвертора на IGBT-транзисторах. В результате работы комплекса значительная часть энергии, потребляемая в процессе испытаний, возвращается обратно в сеть с КПД, превышающим 90 %.
Постановка задачи
В рамках данной статьи рассматривается базовый компонент МПП в структуре ИН – повышающий преобразователь напряжения (рис. 2).
Его применение в качестве формирователя тока объясняется наличием дросселя L на входе, что придаёт устройству свойства источника тока. Кроме того, на выходе рассматриваемого преобразователя необходимо обеспечить напряжение выше, чем на входе. Стандартным уровнем входного напряжения является величина 27 В. На выходе же повышающего преобразователя необходимо обеспечить 180 В. При этом следующий блок ИН – DC/DC-преобразователь замкнут по его входному напряжению. Таким образом, гарантируется необходимый уровень входного напряжения для МВИ.
U in
L in
VT
VD
iout +
C R Uout
–
Рис. 2. Электрическая схема повышающего преобразователя напряжения:
L – дроссель, С – конденсатор, R – сопротивление нагрузки, VT – транзистор, VD – диод, U in – входное напряжение, U out – выходное напряжение, i in – входной ток, i out – ток нагрузки, сигнал управления показан в виде серии импульсов
Выбор повышающего преобразователя в качестве объекта исследования обусловлен также тем, что, несмотря на наличие детального математического описания данного преобразователя [7–10], методик синтеза его системы управления [11–13], а также полноценных результатов испытаний [14, 15], отсутствует методика цифрового синтеза силовой части преобразователя, совмещённой с его системой управления. В рамках данной статьи предлагается свести эти составляющие процесса разработки воедино, а именно обеспечить математическое описание электромагнитных явлений в преобразователе, а также процессов в системе управления, и представить устройство в виде цифрового модуля.
Теоретическая часть
Для решения поставленной задачи воспользуемся статьёй [7], где приведено математическое описание повышающего преобразователя напряжения в виде двух систем уравнений – усреднённой и дискретной. Предлагается задействовать оба варианта: первый – для синтеза преобразователя, второй – для проверки адекватности и проведения испытаний.
За эталонную модель повышающего преобразователя была принята электрическая схема (рис. 3), реализованная на базе элементов библиотеки SimPowerSystems в среде MATLAB Simulink и содержащая нелинейные элементы – транзисторный ключ VT и диод VD. Сравнение динамических характеристик принятой нами эталонной модели и макетного образца устройства представлено в статье [1] и показало их идентичность с погрешностью, не превышающей 2,7 %. Особенности моделирования и исследования устройств силовой электроники в среде MATLAB Simulink иллюстрируются в [16].
Приведённые параметры рассчитаны по соотношениям, представленным в монографиях [8, 9], с учётом зависимости уровня пульсаций напряжения от скважности импульсов и методов контроля, представленных в статье [17].
Вывод уравнений проведём с применением схем замещения преобразователя (рис. 4) для различных состояний транзисторного ключа.
Запишем уравнения по законам Кирхгофа:
для схемы (рис. 4а)
L h + U out = Uin ;
dt iout+ CdUouL = 0;
I out dt для схемы (рис. 4б)
T diin _TT .
< L dt " U n ;
iou z+ CdU ouL = i out in
I dt
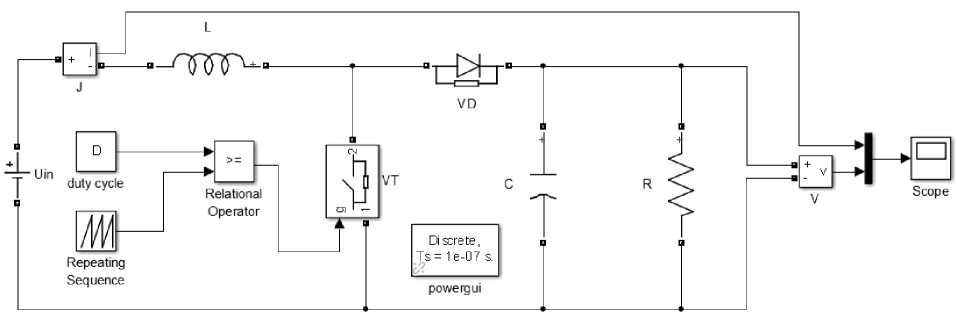
Рис. 3. Эталонная модель повышающего преобразователя в MATLAB Simulink: входное напряжение U in = 27 В; индуктивность дросселя L = 100 мкГн; емкость конденсатора C = 1000 мкФ; сопротивление нагрузки R = 3,33 Ом; скважность импульсов D = 0,85;
несущая частота f = 50 кГц
Юдинцев А.Г., Ткаченко А.А., Синтез повышающего преобразователя для имитатора
Ляпунов Д.Ю. нагрузок систем электроснабжения автономных объектов
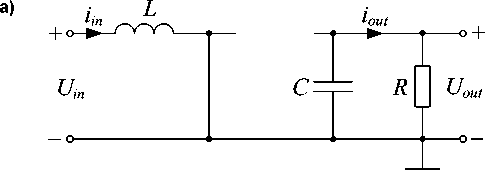
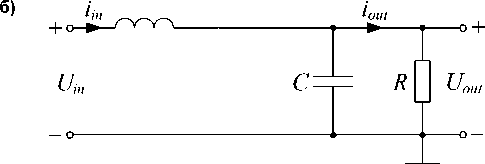
Рис. 4. Схемы замещения повышающего преобразователя при замкнутом (а) и разомкнутом (б) ключе
Объединим эти две системы уравнений в одну путём введения переменной D(t), характеризующей скважность импульсов. В результате система дифференциальных уравнений для описания электромагнитных процессов в преобразователе при- мет вид d-iin^t1 = 1 (Un (t)-(1 -D(tDU..(t));
dt L (1)
. ' du ' = С ((1 - D (t ))-i,n (t)-0.( t)), где D(t) – текущее значение скважности импульсов, которое можно рассматривать как непрерывную, так и импульсную периодическую функцию времени.
Эта реализация математического описания даёт возможность обнулить составляющие в правой части системы (1), когда транзисторный ключ замкнут. Таким образом, уравнения (1) описывают повышающий преобразователь при любом состоянии ключа.
В операторной форме система уравнений (1) имеет вид sin (t) =1 (Un-(1 -D(t))Uout (t));
< L (2)
sUout (t1 = С ((1 - D (t11 iin (t)- iout (t)).
На основании системы уравнений (2) осуществляется построение структурной схемы, в которую входят переменные состояния – входной ток iin и выходное напряжение Uout (рис. 5). Моделирование осуществляется в среде MATLAB Simulink.
Схема (см. рис. 5) является нелинейной относительно D . В интеграторах предусмотрены ограничения снизу от нуля, что целесообразно в режимах гранично-непрерывного и прерывистого токов. Верхний предел не ограничен. Особенности моделирования преобразователей в указанных режимах рассмотрены в [18] и учтены при создании структурной схемы. Отметим, что в качестве не-
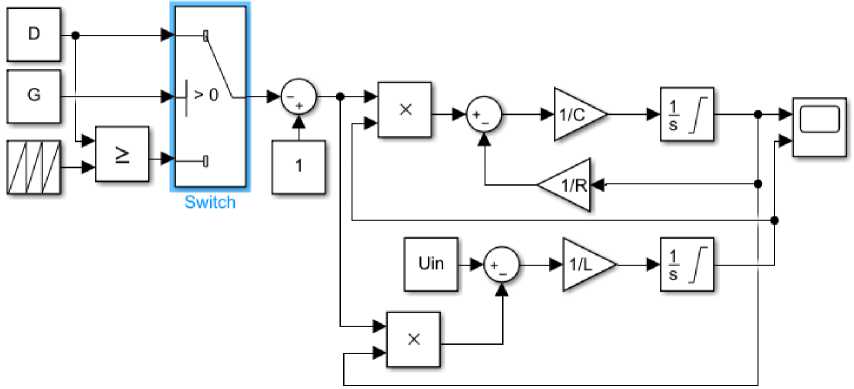
Рис. 5. Структурная схема повышающего преобразователя, реализованная в среде MATLAB Simulink
линейных звеньев в структуре также присутствуют блоки перемножения.
Разработанная структурная схема может быть использована как для непрерывной, так и для дискретной реализации повышающего преобразователя, что, несомненно, является её преимуществом. С этой целью предусмотрен переключающий элемент Switch (см. рис. 5). Если сигнал G = 1, то на вход схемы подаётся значение скважности импульсов D и реализуется непрерывная модель преобразователя; если же G = 0, то на вход системы подаётся серия импульсов управления со скважностью D и несущей частотой 50 кГц и реализуется дискретная модель, аналогичная эталонной модели (см. рис. 3).
Таким образом, создан цифровой модуль повышающего преобразователя, совмещающий силовую часть и систему управления как в непрерывной, так и в дискретной форме. Подобный подход к созданию цифрового модуля был предложен в [19]. Однако в указанной статье применение электрической схемы операционного усилителя в составе структурной схемы преобразователя представляется не совсем корректным.
Практическая часть
Переходные процессы входного тока iin ( t ) и выходного напряжения Uout ( t ) для непрерывной и дискретной реализации структурной схемы (см. рис. 5) приведены на рис. 6. Как видно, графики совпадают.
Справа на рис. 6 приведены фрагменты кривых входного тока и выходного напряжения в увеличенном масштабе, соответствующие установившемуся режиму работы преобразователя. Графики соответственно обозначены: < iin ( t )> и < U out ( t )> – для усреднённой модели, i in ( t ) и U out ( t ) – для дискретной модели.
Согласно численному эксперименту, сравнение кривых переходных процессов по входному току и выходному напряжению для усреднённой и дискретной моделей показало их соответствие с погрешностью, не превышающей 0,6 %, что вызвано наличием пульсаций рассматриваемых величин для дискретной модели. Кривые, полученные на дискретной модели, полностью совпадают с характеристиками эталонной модели (см. рис. 3).
В рассматриваемом случае ограничения в интеграторах не задействованы, так как ток и напряжение больше нуля на протяжении всего переходного процесса (см. рис. 6). Следовательно, в режимах непрерывного тока и в случае, когда кривая тока не падает до нуля на начальном этапе переходного процесса, представляется возможным использовать интеграторы без ограничений и тем самым линеаризовать систему относительно величины 1– D .
Отметим, что для эталонной и дискретной моделей целесообразно использовать решатель дифференциальных уравнений ode23tb с максимальным шагом интегрирования, не превышающим 1 мкс, в то время как для усреднённой модели можно ограничиться методом Эйлера 1-го порядка с шагом 100 мкс, что даёт преимущество при синтезе параметров преобразователя и его регулятора. Приведённые рекомендации были сформулированы на основании монографии [20]. Использование усреднённой модели позволяет значительно снизить временные и стоимостные затраты на процесс синтеза, так как в большинстве случаев исследователю необходимо многократно запускать имитационную модель для варьирования и подстройки параметров силовой части и системы управления и других действий.
Анализ результатов моделирования усреднённой и дискретной моделей даёт возможность ис- iin, А
U out , В
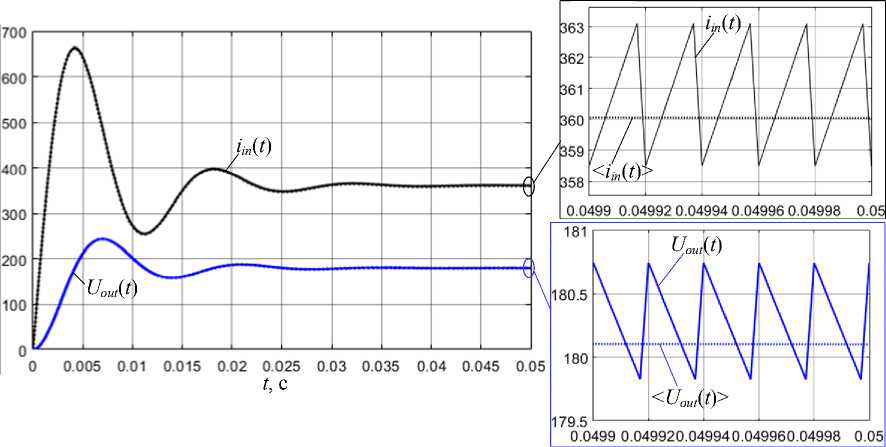
Рис. 6. Переходные процессы выходного напряжения и входного тока

Рис. 7. Имитационная модель передаточной функции по току повышающего преобразователя
пользовать усреднённую модель для синтеза, настройки системы управления и исследования модуля повышающего преобразователя. С другой стороны, для этих целей удобно использовать передаточные функции. В справочнике [10] выведена передаточная функция повышающего преобра-
зователя по току с целью применения для синтеза параметров силовой части и исследования переходных процессов в разомкнутой системе.
На основании структурной схемы преобразователя (см. рис. 5) выведем его передаточную функцию по входному току, так как он является формируемым током нагрузки испытуемой СЭС:
W n ( s ) =
Чп ( s ) U rn ( s )
Ls
1 + (1 - D )2 ■
R
Ls ( RCs + 1 )
_______ RCs + 1 _______
Ls (RCs +1) + (1 - D )2 ■ R
RCs + 1
■
( 1 - D ) 2 ■ R L ■ s 2 + 1
( 1 - D ) 2
. ■ L ■ s + 1 (1 - D )2 R
.
Передаточная функция (3) записана в стандартном виде. Её параметры зависят нелинейно от скважности импульсов D . Представленная функ-
ция используется для описания динамики повышающего преобразователя в режиме непрерывного
тока, характеризуемого граничным значением индуктивности [8]:
L гр
= R
D ( 1 - D ) 2
2 f
Реализация передаточной функции повышающего преобразователя по току (3) в среде MATLAB Simulink (рис. 7) даёт практически нулевую ошибку моделирования относительно непрерывной модели.
Кривая входного тока, полученная при помощи структурной схемы (см. рис. 7), совпадает с кривой, соответствующей непрерывной модели (см. рис. 6), с исчезающе малой погрешностью, что говорит о возможности применения получен-
ной передаточной функции при синтезе рассматриваемого преобразователя.
Выводы
В ходе исследований был рассмотрен ряд моделей, которые применяются для цифрового синтеза повышающего преобразователя ИН. Выведены основные уравнения преобразования энергии в рассматриваемом устройстве. При использовании непрерывной модели осуществляется синтез параметров силовых элементов и системы управления, а цифровая модель применяется для проверки правильности синтеза, так как она учитывает больше факторов, включая разброс параметров элементов по номиналу и дискретизацию по времени управляющих сигналов. Объединение непрерывной и дискретной моделей представляет собой цифровой модуль (см. рис. 5), применяемый для синтеза параметров преобразователя.
Рассмотренные модели взаимно подтверждают правильность синтеза модуля повышающего преобразователя, так как погрешность результатов, полученных на непрерывной и дискретной моделях не превышает 0,6 %, что обусловлено пульсациями входного тока и соответствует коэффициенту пульсаций. Динамические характеристики непрерывной модели и модели, реализованной в виде передаточной функции, абсолютно идентичны в режиме непрерывного тока. Использование последней значительно облегчает синтез системы управления. Повышающий преобразователь обеспечивает входной ток до 360 А и выходное напряжение до 180 В.
Выведенные уравнения и созданный на их основе цифровой модуль в среде MATLAB Simulink рекомендуются для синтеза, моделирования и исследования повышающего преобразователя в составе ИН во всех возможных режимах работы.
Работа выполнялась в рамках проекта FEWM-2020-0046 «Фундаментальные основы и методология создания высокоэффективного энергопреобразования для систем космического и морского назначения на базе интеллектуальных силовых модулей сверхвысокой степени интеграции».
Список литературы Синтез повышающего преобразователя для имитатора нагрузок систем электроснабжения автономных объектов
- Ляпунов, Д.Ю. Методика разработки имитатора нагрузок для наземных испытаний систем электропитания автономных объектов / Д.Ю. Ляпунов, А.А. Ткаченко, А.Г. Юдинцев // Электротехнические системы и комплексы. - 2020. - № 1 (46). - С. 60-66. DOI: 10.18503/2311-8318-2020-1(46)-60-66
- Design and control of multiphase interleaved boost converters-based on differential flatness theory for PEM fuel cell multi-stack applications / P. Thounthong, P. Mungporn, D. Guilbert et al. // Electrical Power and Energy Systems. - 2020. - No. 124 (2021) 106346. - P. 1-13. DOI: 10.1016/j.ijepes.2020.106346
- Advances in Intelligent Systems and Computing. Recent Developments in Machine Learning and Data Analytics / J. Kalita, V.E. Balas, S. Borah, R. Pradhan. - Singapore: Springer Nature Singapore Pte Ltd., 2019. -Vol. 740. - 530p.
- Strasser, T.I. European Guide to Power System Testing / T.I. Strasser, E. C. W. de Jong, M. Sosnina. -Cham: Springer Nature Switzerland AG, 2020. - 132 p.
- Серебряков, П.Б. Информационное обеспечение электромехатронных преобразователей / Ю.С. Смирнов, А.Н. Лысов, П.Б. Серебряков // Вестник ЮУрГУ. Серия «Энергетика». - 2012. - Вып. 17, № 16. - С. 31-36.
- The Implementation of the Cross-cutting Design of Electronic Communication Modules Using National Instruments Technologies /P. Korolev, K. Novikov, S. Polesskiy, G. Korotkova // Tomsk, Proc. of International Siberian Conference on Control and Communications SIBCON, IEEE. - 2019. - P. 1-4. DOI: 10.1109/sibcon.2019.8 729585
- Лукашенков, А.В. Обобщенная математическая модель импульсного повышающего преобразователя напряжения /А.В. Лукашенков, И.В. Капустин // Известия Тульского государственного университета. Технические науки. - 2012. - Вып. 10. - С. 189-198.
- Мелешин, В.И. Транзисторная преобразовательная техника / В.И. Мелешин. - М.: Техносфера, 2005. - 632 с.
- Derbel, N. Modeling, Identification and Control Methods in Renewable Energy Systems / N. Derbel, Q. Zhu. - Singapore, Springer Nature Singapore Pte Ltd., 2019. - 372 p.
- Rashid, M. Power Electronics Handbook /M. Rashid. - Oxford, Butterworth-Heinemann, Elsevier, 2018. -1496p.
- Мелешин, В.И. Управление транзисторными преобразователями электроэнергии / В.И. Мелешин, Д.А. Овчинников. -М.: Техносфера, 2011. - 576 с.
- Коршунов, А.И. Повышение качества стабилизации выходного напряжения импульсного преобразователя постоянного тока / А.И. Коршунов // Известия вузов. Приборостроение. - 2013. - Т. 56, № 3. -С. 48-57.
- Примшиц, П.П. Синтез системы автоматического управления повышающим преобразователем постоянного напряжения при работе на активную нагрузку /П.П. Примшиц, А.В. Миронович // Энергетика. Известия вузов и энергетических объединений СНГ. - 2005. - № 6. - С. 29-36.
- Михальченко, Г.Я. Исследование работы комбинированного понижающе-повышающего преобразователя для высоковольтной энергопреобразующей аппаратуры / Г.Я. Михальченко, А.В. Кобзев, В.И. Апасов // Доклады Томского университета систем управления и радиоэлектроники. - 2019. - Т. 22, № 1. - С. 89-94. DOI: 10.21293/1818-0442-2019-22-1-89-94
- Data-Driven Approach for Current Control in DC-DC Boost Converters / C.L. Remes, G.R. Goncalves da Silva, A. Treviso et al. // IFAC PapersOnLine. - 2019. - Vol. 52, iss. 1. - P. 190-195. DOI: 10.1016/j.ifacol.2019.06.059
- Фролов, В.Я. Устройства силовой электроники и преобразовательной техники с разомкнутыми и замкнутыми системами управления в среде Matlab - Simulink: учеб. пособие / В.Я. Фролов, В.В. Смороди-нов. - СПб.: Лань, 2018. - 332 с.
- Sabanci, K. Development of an expression for the output voltage ripple of the DC-DC boost converter circuits by using particle swarm optimization algorithm / K. Sabanci, S. Balci // Measurement. - 2020. -No. 158 (2020) 107694. - P. 1-9. DOI: 10.1016/j.measurement.2020.107694
- Narayanaswamy, P.R.I. Power Electronic Converters. Interactive Modelling Using Simulink / P.R.I. Na-rayanaswamy. - CRC Press, Taylor & Francis Group, 2018. - 340 p.
- Control of Series-Parallel Conversion Systems / X. Ruan, W. Chen, T. Fang et al. - Beijing, Science Press, Singapore Springer Nature Singapore Pte Ltd., 2019. - 213 p.
- Скворцов, Л.М. Численное решение обыкновенных дифференциальных и дифференциально-алгебраических уравнений /Л.М. Скворцов. -М.: ДМКПресс, 2018. - 230 с.
