Синтез приближенно оптимального управления углом ориентации межпланетного космического аппарата при уменьшении скорости в атмосфере Марса

Автор: Куркина Екатерина Владимировна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4-1 т.20, 2018 года.
Бесплатный доступ
Рассматривается динамическая система, описывающая пространственное движение в атмосфере на неизменной высоте межпланетного космического аппарата с малой асимметрией при уменьшении скорости полёта. Целью работы является синтез оптимального приближённого управления углом ориентации, учитывающего изменение величины обобщённой функции аэродинамической и инерционной асимметрий применительно к задаче уменьшения скорости межпланетного космического аппарата в атмосфере на неизменной высоте полёта. Для решения задачи синтеза управления применялся метод динамического программирования Беллмана и нерезонансная схема метода усреднения. Достоверность полученных результатов подтверждается численным моделированием движения космического аппарата с малой аэродинамической и инерционной асимметриями на неизменной высоте в атмосфере Марса.
Оптимальное управление, асимметричный космический аппарат, метод беллмана, усреднение, атмосфера марса
Короткий адрес: https://sciup.org/148314018
IDR: 148314018 | УДК: 681.51
Suboptimal control synthesis of the interplanetary spacecraft orientation angle at speed drop inside the Mars atmosphere
The article considers a dynamic system describing the spatial movement inside the atmosphere at the invariable altitude of the interplanetary spacecraft with small asymmetry at speed drop of flight. The purpose of work is suboptimal control synthesis of the orientation angle, which considers change of the value of generalized aerodynamic and inertial asymmetry function for task of speed drop of the interplanetary spacecraft inside the atmosphere at the invariable flight altitude. Bellman’s dynamic programming method and non-resonance scheme of averaging method are applied to task solution of control synthesis. The reliability of results is confirmed by numerical modeling of the spacecraft movement with small aerodynamic and inertial asymmetries at invariable altitude inside the Mars atmosphere.
Текст научной статьи Синтез приближенно оптимального управления углом ориентации межпланетного космического аппарата при уменьшении скорости в атмосфере Марса
Задачам синтеза управления космическим аппаратом и исследованиям движения КА в атмосфере Марса посвящено множество работ. Например, в работе [1] решается задача оптимального управления космическим аппаратом при формировании орбиты искусственного спутника Марса. В работе [2] проводится анализ движения космического аппаратапри переходе на орбиту планетыс использованием торможения в атмосфере. Следует отметить, что ограничение пространственного угла атаки необходимо для исключения перегрева бортового оборудования аппарата, неравномерно закрытого теплозащитным покрытием. В работе [3] представлена схема оптимизации траектории для фазы спускаемого аппарата с посадкой на Марса с учетом возмущений. Существуют публикации по управлению величиной асимметрии при реализации резонансных эффектов в процессе атмосферного спуска космического аппарата [4]. В известных публикациях отсутствует решение задачи управления углом атаки посредством изменения малой аэродинамической и инерционной асимметрией спускаемого космического аппарата на неизменной высоте полёта. В задаче торможения в атмосфере после межпланетного перелета возможны «рикошеты» от атмосферы при превышении первой космической скорости [5]. Использование в модели предположения о постоянстве высоты в системе дифференциаль-
ных уравнений не позволяет учитывать отскок от атмосферы.
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Целью работы является решение задачи оп- тимального управления углом атаки космиче- ского аппарата, совершающего движение в атмосфере планеты на неизменной высоте.
Рассматривается пространственное движение космического аппарата в атмосфере планеты. Предполагается, что полет КА происходит на неизменной высоте. При этом сила лобового сопротивления обеспечивает уменьшение скорости центра масс космического аппарата без использования (реактивных) двигателей.
Ставиться задача нахождения выражения для приближенного оптимального управления пространственным углом атаки при атмосфер- ном торможении асимметричного межпланетного космического аппарата на неизменной высоте полёта. Для описания относительного движения космического аппарата [6] с изменяемой аэродинамической и инерционной асимметрией при условии постоянной положительной угловой скорости ωx применяются квазилиней- ные уравнения:
dα
dt = ε f1 + ε f2( θ )u;
d θ =Δ+ε f( θ )u, dt 3
где f i =—"А-qa, f 2 =--—cos(0 + 61), 4ωa2q 2ωa
f3 = “----sin(Oi + 0), А = to — to] 2 - резо-
2юяа x 1,2
a нансное соотношение частот, tox - угловая скорость космического аппарата относительно продольной оси OX, а - угол атаки, 0 - быстрая фаза, 0 = ф — п /2, ф - аэродинамический угол крена, mA – параметр, характеризующий величину инерционной и аэродинамической асимметрий; 01 - параметр, который определяет взаимное расположение инерционной и аэродинамической асимметрии; to1 2 = Ixtox /2 ± toa; Ix = Ix /1; Ix и Iy = Iz = I - моменты инерции КА относительно осей координат связанной систем OXYZ; toa = ^ Ix2 toX / 4 + to2 ; to - частота прецессии КА при угловой скорости tox =0; to = ^/-m^qSLctga /1, q - скоростной напор, S – площадь миделевого сечения, L - длина КА; mzn- коэффициент восстанавливающего аэродинамического момента, б - малый параметр, характеризующий величину параметра аэродинамической асимметрии.
При численном интегрировании система уравнений относительного движения наноспутника (1) решается совместно с тремя уравнениями для нахождения параметров движение центра масс: угла наклона траектории, скорости центра масс V и высоты полёта H [5].
3. МЕТОД УПРАВЛЕНИЯ
Для решения данной задачи оптимального управления углом атаки используется метод динамического программирования Беллмана [7]. Согласно методу Беллмана, ставится задача нахождения приближенного оптимального управления на всем отрезке атмосферного движения при неизменной высоте полёта. При этом управление и должно быть оптимальным в каждый момент времени полёта t е [ t o , T ] .
Необходимо найти управление u0 е U , переводящее начальную величину угла атаки a 0 =a (t o ) в нулевое положение a T = a (T) = 0 за минимальное время. В качестве критерия оптимальности был выбран квадратичный критерий [8]:
T
I = s j ( k 1 a 2 + k2u2 ) dt , (2) 0
где k 1 , k 2 - весовые коэффициенты критерия оптимальности (k 1 > 0, k2 > 0), V = k 1 a 2 + k2u2 - функция Ляпунова.
Применение метода динамического программирования для динамической системы (1) приводит к необходимости решения некоторого уравнения в частных производных – уравнения Беллмана относительно производящей функции p(a, 0). Определение данной функции позволяет найти оптимальное управление u0 , как функцию от вектора состояния, то есть решить задачу синтеза.
Для решения задачи оптимизации используется принцип Беллмана, который для системы (1) и критерия (2) приводит к соотношению:
• I 1 2 , 2 dp da др d0 ] _ min sk]a +sk9u + —— + —— = 0,(3) u ( 1 2 da dt d0 dt J где p(a, 0) - производящая функция.
Выражение, стоящее под знаком минимума в соотношении (3), представляет собой квадратичную функцию управления u . Выделяем слагаемые, зависящие только от управления, и применяем необходимое и достаточное условие минимума полученной функции. Тогда оптимальное управление u 0 определиться из условия:
u0
dp cos(0 + 01) dp sin(0 + 01) da 4k2toa d0 4k2toaa
. (4)
Подставляя управление (4) в условие (3) и, приводя подобные члены, получим уравнение Беллмана для квазилинейнойдинамической системы:
ska2 бdp to2q a £fdp^2cOS2(0 + 01) + bK-1 a — sa — s I I + da 4toaq (day 16k2toa dpdp sin(20 + 20j) ppYsrn2 (0 + 0t) dp -
+ бб IА = 0 . (5)
dad0 16k 2 ® a a (d0j 16k 2 ® a a 2 d0
В этом случае определение оптимального управления для квазилинейной динамической системы определяется следующим образом: 1) из уравнения в частных производных (5) находится функция p ( a , 0 ) ; 2) функция p ( a , 0 ) подставляется в выражение (4) и определяется оптимальное управление u0(a, 0).
После подстановки u0(a, 0) в исходную систему (1), решения полученной системы должны удовлетворять условиям устойчивости, в частности, должны стремиться с течением времени к нулевому значению a(T) = 0.
Функция p ( a , 0 ) является периодической по быстрой фазе 0 , что затрудняет синтез управления. С целью исключения быстрой фазы решим дифференциальное уравнение в частных производных (5) совместно с уравнениями системы приближенно методом усреднения.
В соответствии с нерезонансной схемой метода усреднения решение уравнения (5) будем искать в виде асимптотических рядов [9, 10]:
a = a ° +su 1 ( a0,0 ° ) +...
■0 = 0 ° +e U , ( a ° , 0 ° ) +... (6)
p = p ° ( a0 ) +£p 1 ( a ° , 0 ° ) +...
После подстановки рядов (6) в уравнение (5)в первом приближении метода усреднения получим:
s k 1 ( a ° )
dp ° to 2q о f dp ° ) 1
£ -^— 2- a — £ -^ I ----2-
Sa ° 4 ^a q (da ° J 32k 2 to 2
= °. (7)
Решение уравнения (7) может быть найдено в виде квадратичной функции методом неопределённых коэффициентов в виде [5]:
больший радиус основания конуса r = 1,25 м, высоту конуса l = 2 м и массу m=576 кг, моменты инерции Ix = 270кгм2, Iy = 443 кгм2, Iz = 443 кгм2. Рассматриваемый космический аппарат совершает спуск в атмосфере Марса (средний радиус R0 = 3390 км) при среднем ускорении свободного падения g0=3,86 м/с2. Начальная скорость полета V(0)=4200 м/с. Полет осуществлялся на выбранных высотах: 25 км и 50 км.
На рис. 1-3 представлены результаты численного моделирования системы (1) четырехэтапным методом Рунге-Кутты. На рисунке 1 представлен график изменения скорости космического аппарата на неизменной высоте. Скорость космического аппарата падает за счет торможения в атмосфере Марса.
p ° = A ( a ° ) 2 . (8)
Причем, для обеспечения асимптотической устойчивости решения усредненной системы в соответствии с методом Ляпунова функция p ( a , 0 ) должна быть положительно определена (A>0). После подстановки (8) в (4) получим выражение для оптимального по быстродействию управления пространственным углом атаки:
Aa cos ( 0 + 0 1 )
U 2k 2 raa ,
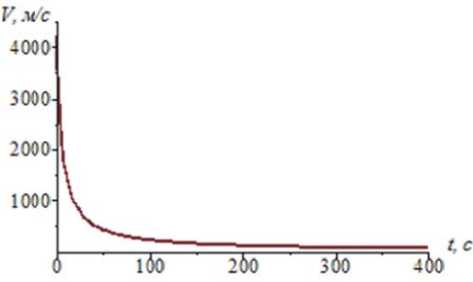
Рис. 1. Изменение скорости космического аппарата
4k 2
где A = —2 —to q + q to3q 2k2 — q2toak k2
Подставим управление (9) в исходное уравнение (1). С учётом первого приближения метода усреднения получаем:
da dt
■ £— t 8 toa
" 2to2 ( q Если функция перед углом атаки в правой части (10) имеет отрицательный знак, то найденное управление (9) при подстановке в (10) обеспечивает асимптотическую устойчивость по углу атаки.
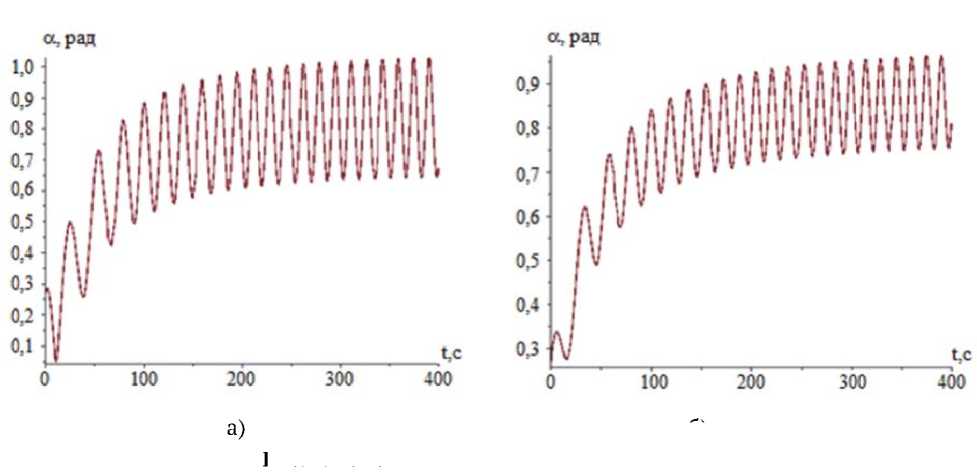
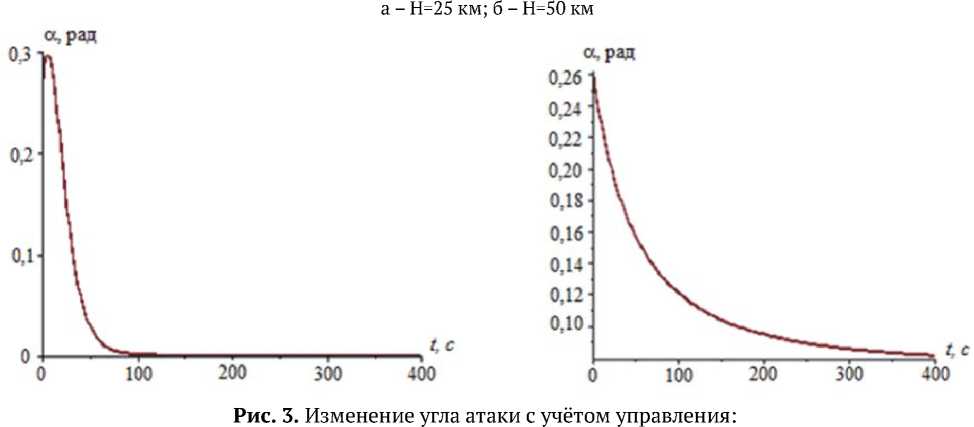
4. РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ Производилось численное моделирование относительного движения космического аппарата с малой асимметрией, осуществляющего движение в атмосфере Марса на неизменной высоте. В процессе получения численных результатов использовалась система уравнений (1). При этом предполагалось, что космический аппарат имеет массово-инерционные характеристики, аналогичные спускаемому космическому аппарату «Mars Polar Lander» [11]: наи- На рис. 2 показано изменение величины пространственного угла атаки космического аппарата в атмосфере Марса на высоте 25 км и 50 км, соответственно,с учётом влияния аэродинамической и инерционной асимметрий. Как видно из рис. 2 медленная составляющая углаатаки космического аппарата увеличивается, что может привести к аварийной ситуации. Поэтому, необходимо осуществлять управление углом ориентации космического аппарата. На рисунке 3 представлены графики изменения медленной составляющей угла атаки космического аппарата в атмосфере Марса на высотах 24 км и 50 км, соответственно, с учётом оптимального управления (9). Из рис. 2 и 3, следует, что управление величиной асимметрии посредством выражения (9) способствует уменьшению угла атаки до малых значений меньших 0,01 рад. Следовательно, задача оптимального управления пространственным углом атаки выполнена.
5. ВЫВОДЫ Таким образом, применение метода динамического программирования Беллмана в сочетании с методом усреднения позволило найти выражение для приближенного оп- б) Рис. 2. Изменение угла атаки без управления: а – Н=25 км; б – Н=50 км тимального управления пространственным углом атаки при атмосферном торможении асимметричного межпланетного космического аппарата на неизменной высоте полёта. Было получено новое выражение для приближённо-аналитического оптимального управления, учитывающего изменение малой функции аэродинамической и инерционной асимметрий. Численные результаты подтверждают, что полученное приближённоаналитическое выражение для оптимального управления обеспечивает уменьшение пространственного угла атаки до заданных малых величин. Отметим, что управление реализовано при наличии у космического аппарата как аэродинамической, так и инерционной асимметрии. Следует отметить, что полученное оптимальное управление обеспечивает уменьшение только медленной составляющей угла атаки. При этом изменение быстрой составляющей угла атаки не рассматривается.
Список литературы Синтез приближенно оптимального управления углом ориентации межпланетного космического аппарата при уменьшении скорости в атмосфере Марса
- Соколов Н.Л. Оптимальное управление космическим аппаратом при формировании орбиты искусственного спутника Марса // Фундаментальные исследования. 2015. № 3. С. 133-138
- Зо Мин Тун. Анализ движения космического аппарата при переходе на орбиту планеты с использованием торможения в атмосфере // Интернет-журнал «Науковедение» 2014. Выпуск 2, март - апрель. URL:: http://naukovedenie.ru/PDF/29TVN215.pdf (дата обращения 15.05.2018).
- Rongjie Liu. Powered-descent trajectory optimization scheme for Mars landing / Liu Rongjie, Li Shihua, Chen Xisong, Lei Guo // Advances in space research. 2013. p.1893-1891.
- Lyubimov, V.V., Kurkina, E.V. 2016. Simulation of the dynamics of non-resonant motion in a controlled descent of an asymmetric spacecraft in the low-density atmosphere // Proceedings of the International conference Information Technology and Nanotechnology. Samara, Russia, May 17-19, 2016. pp.610-621. http://ceur-ws.org/Vol-1638/ (дата обращения 15.05.2018).
- Ярошевский В.А. Вход в атмосферу космических летательных аппаратов. М.: Наука. Физ.-мат.лит., 1998. 336 с.
