Синтез системы управления грузоподъемными механизмами

Автор: Доманов Виктор Иванович, Муллин Игорь Юрьевич, Холявко Артур Олегович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные наукоемкие инновационные технологии
Статья в выпуске: 4-3 т.16, 2014 года.
Бесплатный доступ
В статье исследуется крановый электропривод, в частности, его система управления. На основе уравнений динамики составлена структурная схема с вычислением угла смещения.
Угол смещения, координата, подчиненное регулирование, регулятор, крановый электропривод
Короткий адрес: https://sciup.org/148203245
IDR: 148203245 | УДК: 621.13.13
Control system synthesis of load-lifting mechanisms
In article the crane electric drive, in particular, its control system is investigated. On the basis of dynamic equations the block diagram with calculation of angular displacement is made.
Текст научной статьи Синтез системы управления грузоподъемными механизмами
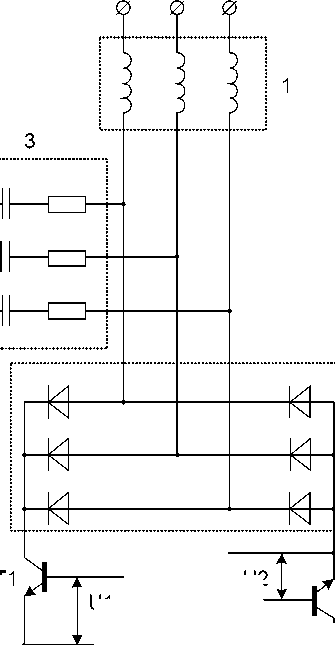
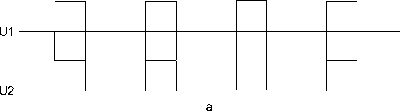
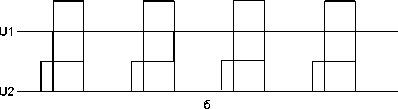
Холявко Артур Олегович, студент нулевому проводу через RC-цепи 3. Предлагаемая схема уменьшает бросок тока за счет плавного наращивания напряжения на статорных обмотках по требуемому закону. При синхронных и равных по длительности сигналах ШИМ осуществляется плавный пуск рис. 1а. При синхронных и не равных по длительности сигналах осуществляется динамическое торможение рис. 1б RC цепи служат для снижения коммутационных перенапряжений.
N
ABC
T2
T1
U2
U1
А
Б
Рис. 1. А – схема транзисторного регулятора напряжения; Б – осциллограммы сигналов на транзисторах
Рассмотрим задачу синтеза системы управления перемещением с ограничением раскачивания груза. Соответствующая схема механической системы представлена на рис. 2. На рисунке приняты следующие обозначения: М – масса тележки, m – масса груза, L – длина подвеса, F – сила, приложенная к тележке, φ – угол смещения груза от вертикали. Уравнения, описывающие такую систему, следующие [2]:
( M + m )V - mL y = F
,
J ГР(? + mgL^ = mLV где V – скорость тележки, Jгр – момент инерции груза, g – ускорение силы тяжести.
Момент инерции груза относительно точ- ки подвеса определяется выражением:
J ГР = mL 2
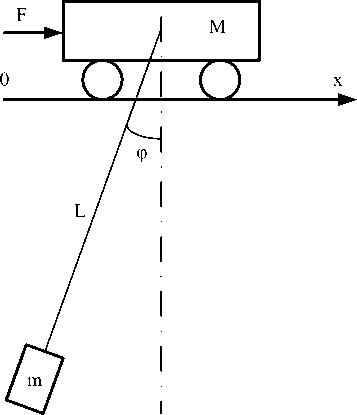
Рис. 2. Схема перемещения тележки с грузом
С учетом выражения (1) и сил сопротивления вязкого трения уравнения в операторной форме принимают вид:
MVp = F - m(Vp - L ^ p 2) - VK TP2
Ф ( Lp 2 + K Tp i p + g ) = Vp
где K ТР 1 , K ТР2 , – коэффициенты трения для m и M соответственно.
На основе уравнений (2), (3) и с учетом описания АД при амплитудном управлении [3] можно составить структурную схему разомкнутого электропривода перемещения тележки.
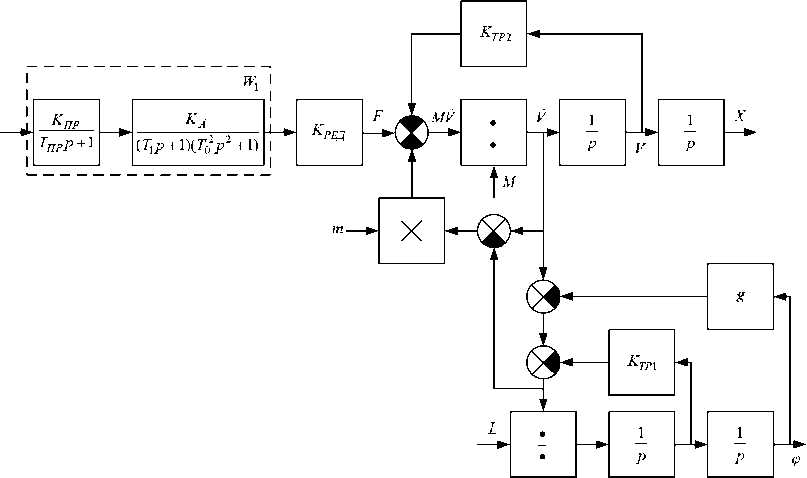
Рис. 3. Структурная схема разомкнутого электропривода перемещения тележки
где K пр , Т пр – параметры преобразователя, K Д , T 1 , T 0 – параметры двигателя, K ред – коэффициент редуктора.
В целях создания замкнутой системы управления используем датчик ускорения. Для адаптации системы необходимо контролировать вес груза ( m ) и длину подвеса ( L ). Рассматриваемые координаты связаны следующими передаточными функциями:
M ДВ
K РЕД
1 .
- V = W M (p) V
W X ( p )
Ф =
g + K ТР I p + Lp p
V " = W ф ( p )V ^
V = -K V V- = W v ( p)!/■
Tvp +1
где K v , T v – коэффициент и постоянная времени апериодического звена.
В результате вычисления сигналов M дв , φ , V можно создать структуру подчиненного регулирования электропривода перемещения с адаптацией под конкретный режим работы (рис. 4). Ограничение момента в рассматриваемой структуре реализуется за счет контроля уровня выходного сигнала регулятора угла смещения. На основе структуры, приведенной на рис. 4, было выполнено моделирование исследуемого электропривода перемещения с вычисленными сигналами обратных связей, результаты которого приведены на рис. 5, 6. Видно, что введение обратной связи по φ позволяет практически исключить колебательность. Регулятор φ в этом случае выполняет роль управляемого задатчика интенсивности для координаты момента.
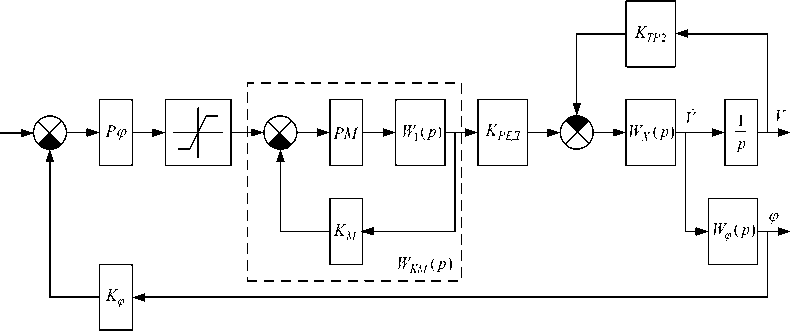
Рис. 4. Структурная схема подчиненного регулирования электропривода перемещения
Оптимальный процесс достигается, когда плавный пуск осуществляется с постоянным ускорением. В процессе эксплуатации изменяются значения m и L. По сигналам соответствующих датчиков происходит перестройка вычислителей координат Mдв и φ, и параметров регуляторов РМ и Рφ. Таким образом, можно осуществить управление тележкой в различных усло- виях работы с ограничением раскачивания и оптимальным по ускорению процессом движения. Анализ чувствительности передаточных функций системы управления показывает, что в предлагаемом электроприводе перемещения тележки наибольшие требования по точности предъявляются к датчику веса груза.
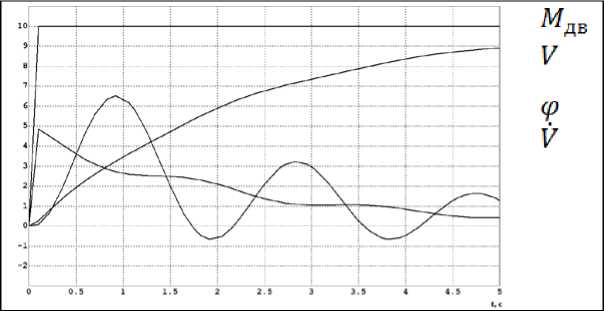
Рис. 5. Результаты моделирования электропривода без обратной связи
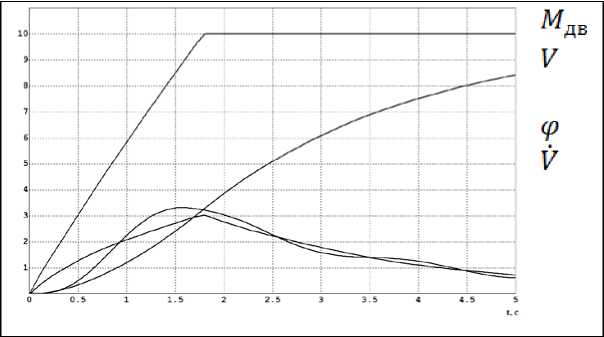
Рис. 6. Результаты моделирования электропривода с введенной обратной связью
Выводы: разработаны и исследованы модели элементов системы управления и механической части грузоподъемных устройств, в том числе силовые маловентильные преобразователи для системы автоматизированного управления электроприводами подъема и перемещения электротали. Это позволяет создать систему управления ГПМ с улучшенными качественными показателями за счет ограничения угла раскачивания и рывка. В результате этого сокращается время транспортировки и повышается сохранность грузов.
Список литературы Синтез системы управления грузоподъемными механизмами
- Доманов, А.В. Электропривод с трехфазным асинхронным двигателем/А.В. Доманов, В.И. Доманов, И.Ю. Муллин//Патент РФ на изобретение №2418356, зарегистрирован 10.05.2011.
- Гордеев, А.В. Система управления грузоподъемными машинами/А.В. Гордеев, И.Ю. Муллин//Проблемы электротехники, электроэнергетики и электротехнологии -IV Межд. научно-техн. конф. Часть 1. -Тольятти, 2012. С. 88-93.
- Доманов, А.В. Автоматизация управления грузоподъемными машинами/А.В. Доманов, В.И. Доманов, И. Ю. Муллин//Промышленные АСУ и контроллеры".2011. №6. С. 18-21.
- Акуленко, Л.Д. Управление колебаниями/Л.Д. Акуленко, Б.Н. Соколов, Ф.Л. Черноусько. -М.: Наука, 1980. 384 с.
- Доманов, А.В. Синтез крановых электроприводов с вычислением угла раскачивания груза/А.В. Доманов, В.И. Доманов, И.Ю. Муллин//Электроника и электрооборудование транспорта. 2011. №5-6. С. 33-36
