Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения

Автор: Усынин Юрий Семнович, Григорьев Максим Анатольевич, Шишков Александр Николаевич, Гладышев Сергей Павлович, Горожанкин Алексей Николаевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 37 (296), 2012 года.
Бесплатный доступ
Рассматриваются методы частотного синтеза систем управления синхронной реактивной машиной независимого возбуждения.
Электропривод с синхронной реактивной машиной независимого возбуждения, методы частотного синтеза
Короткий адрес: https://sciup.org/147158194
IDR: 147158194 | УДК: 62-83::621.313.3
Synthesis of control system by electrical drive with synchronous reluctance independent excitation machine
In the article the methods of frequency synthesis of the control systems for synchronous reluctance independent excitation machine are considered.
Текст научной статьи Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения
Развитие частотных методов идентификации для электроприводов переменного тока является актуальной научно-технической задачей. Это обусловлено тем, что, с одной стороны, использование спектральных методов позволяет резко увеличить достоверность синтеза системы управления, что доказано многолетним опытом наладки электроприводов постоянного тока, с другой стороны, в настоящее время эти методы применительно к электроприводам переменного тока освоены только фирмой Siemens и ориентированы под выпускаемую ими продукцию.
Синтез частотных методов идентификации состоял из нескольких этапов. На первом этапе были сформулированы требования к программноаппаратным средствам частотного анализа. В частности, это расширенный диапазон тестового сигнала до 48000 рад/с (он обусловлен большой несущей частотой ШИМ модулятора до 16 кГц); передача тестового сигнала задания по быстродействующим каналам связи, так как АЦП, встроенные в современные преобразователи частоты, имеют очень узкую полосу равномерного пропускания частот; разработка устройства измерения момента, так как измерители, разработанные фирмами-изготовителями современных преобразователей частоты, не удовлетворяют по точностным показателям требованиям к решению научных задач [1].
На втором этапе предложен и реализован алгоритм спектрального анализа физических образцов электропривода переменного тока, выполненный методом синхронного детектирования. Алгоритм состоит в следующем: тестовый гармонической сигнал формировался программно в технологическом контроллере (опционная плата серийного преобразователя частоты), что позволило без задержек подавать сигнал непосредственно в исследуемую структуру по быстродействующей шине данных; коммутирующие векторы (синфазный и квадратурный) формировались в вычислительном устройстве, при этом синхронизация с тестовым (с задающим сигналом) выполнялась через быстродействующий цифровой выход технологического контроллера; измеряемая выходная координата (например, фазный ток, скорость) подавалась в вычислительное устройство с датчиков через цифровой осциллограф.
Усынин Ю.С., Григорьев М.А.,Шишков А.Н., Гладышев С.П., Горожанкин А.Н.
На третьем этапе был предложен и реализован алгоритм спектрального анализа математических моделей, описывающих устройства с амплитудной модуляцией и созданных в среде Matlab. Необходимость в таком алгоритме обусловлена тем, что существующие опции позволяют автоматически строить частотные характеристики динамических звеньев без учёта амплитудной модуляции сигнала.
На последнем этапе выполнялся синтез измерительного устройства электромагнитного момента. Сложность задачи состояла в том, что с одной стороны, точность измерения должна быть достаточно высокой, так как от качества настройки контура регулирования момента зависит успешная наладка внешнего контура регулирования скорости, с другой стороны, измеритель должен быть по возможности простым, так как программная реализация сложных алгоритмов в цифровых микроконтроллерах потребовала бы больших вычислительных ресурсов.
Наиболее успешно этим требованиям удовлетворяет аппарат наблюдающих устройств, тем более когда доступен ряд переменных состояния для измерения с высокой точностью.
На рис. 1 показано наблюдающее устройство электромагнитного момента. Здесь вычисление момента выполнялось по упрощенной модели, когда электромагнитный момент представлялся в виде произведения индукции в зазоре на те статорные токи, которые находятся в данный момент времени над полюсом, при этом индукция принималась над полюсом постоянной. Такое допущение вполне применимо для диапазона токов, при которых зависимость между электромагнитным моментом и током линейная. Достоверность определения электромагнитного момента можно обеспечить за счет охвата наблюдателя обратной связью по измеряемой координате скорости. Параметры контура наблюдателя выбираются такими, чтобы обеспечить достоверное воспроизведение измеряемой координаты в полосе равномерного
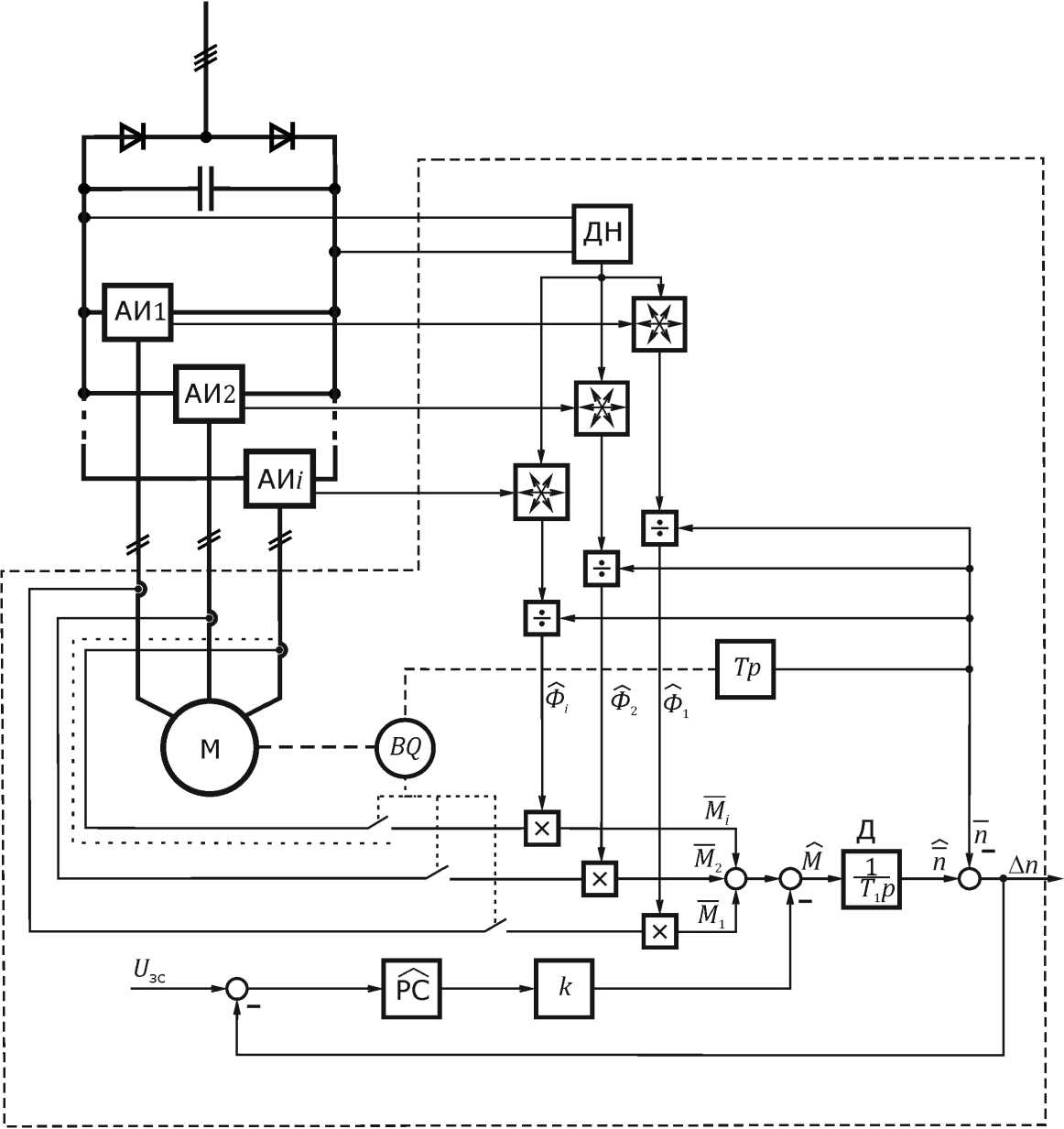
Рис. 1. Модель наблюдающего устройства
пропускания контура регулирования момента. При этом частота среза контура наблюдающего устройства принималась 800 рад/с. Такая точность может быть обеспечена только, если датчик скорости способен достоверно измерять координату скорости в диапазоне частот тестового сигнала, превышающей частоту среза контура регулирования момента. Современные импульсные датчики удовлетворяют этому требованию, если их устанавливать непосредственно на вал исследуемого двигателя и тем самым в максимальной степени снизить уровень оборотных пульсаций и люфт.
Точность работы наблюдателя проверялась на обобщённой математической модели электропривода. Показано, что в полосе равномерного пропускания частот контура регулирования момента при соответствующем коэффициенте обратной связи наблюдателя 10. Дальнейшее увеличение коэффициента обратной связи не позволяет увеличить точность. Теоретически показано и экспериментально доказано, что предложенный наблюдатель позволяет компенсировать все возмущения, кроме момента холостого хода, в диапазоне полосы равномерного пропускания частот, поэтому перед измерением частотных характеристик, необходимо иметь зависимость момента холостого хода как функцию скорости.
Электроприводы с СРМНВ работают в функции положения ротора, но имеют структуры, аналогичные электроприводам постоянного тока. При питании электроприводов с СРМНВ от индивидуальных источников тока целесообразно принимать классические законы управления вентильными преобразователями, в которых переключающая функция системы управления работает в режиме ШИМ. Контуры регулирования фазных токов настраиваются индивидуально по критериями, близ- ким к электроприводу постоянного тока. За счет широкой полосы равномерного пропускания частот в контуре тока (до 1000 рад/с) удаётся скомпенсировать влияние соседних фаз на работу контура тока, а структурную схему электропривода можно представить такой же, как в электроприводе постоянного тока.
Были предложены структуры управления с независимым, последовательным возбуждением и с ослаблением поля. Синтез структуры управления выполнялся частотными методами, а проверка качества наладки – с использованием аппарата экспериментальных частотных характеристик.
В схеме управления с независимым возбуждением (рис. 2) статорные обмотки запитывались от шести независимых источников тока [1–3]. Задание тока якорных обмоток подавалось с выходов регуляторов скорости AR и инвертора И1 через узел формирования фазных токов (УФФТ). УФФТ по сигналам датчика положения ротора формировал задания на токи статора. Задание на ток возбуждения подавалось с выходов потенциометра RP и инвертора И2. Скорость поддерживалась регулятором скорости AR . Допустимое значение электромагнитного момента устанавливается блоком ограничения A 1.
В электроприводах с большим диапазоном изменения момента нагрузки возможно включение двигателя по схеме последовательного возбуждения (рис. 2, а). В этом случае ток возбуждения изменяется пропорционально абсолютной величине напряжения U рс, для чего применён функциональный преобразователь А 3.
В схеме с двухзонным регулированием скорости (рис. 2, б) при напряжениях на статоре ниже номинального регулятор напряжения АV насыщен, а ток возбуждения определяется уставкой блока
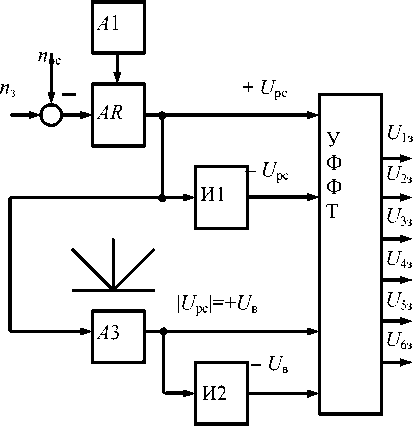
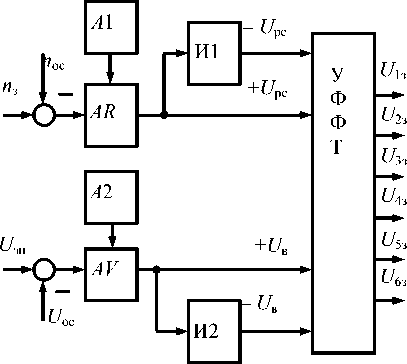
Рис. 2. Варианты схем управления электроприводом: а) с последовательным возбуждением; б) с двухзонным регулированием
Усынин Ю.С., Григорьев М.А.,Шишков А.Н., Гладышев С.П., Горожанкин А.Н.
ограничения А 2. При увеличении скорости выше основной происходит снижение напряжения на выходе регулятора AV и ослабление потока.
Показано, что в электроприводе с СРМНВ, как и в двигателях общепромышленного исполнения (синхронных, асинхронных, постоянного тока), имеющих номинальный КПД в пределах 0,8– 0,95, относительное значение суммарных потерь (хотя при этом абсолютные потери могут отличаться весьма значительно) при регулировании с постоянным потоком и в схемах с последовательным возбуждением отличаются незначительно. Заметная выгода при работе с регулируемым потоком наблюдается в зоне малых нагрузок при М <0,5 М н и при больших перегрузках М >0,5 М н .
В высокоскоростных электроприводах переменного тока приходится учитывать, что между статорным током и электромагнитным моментом нет явной зависимости, которая прослеживается в электроприводах постоянного тока. С увеличением номинальной скорости, которую выбирают при проектировании электропривода, когда частота вращения ωр больше частоты равномерного пропускания частот контура регулирования тока ωт , это обстоятельство проявляется более выразительно [1].
Список литературы Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения
- Усынин, Ю.С. Частотные характеристики канала регулирования момента в синхронных электроприводах/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электричество. -2012. -№ 4. -С. 54-59.
- Усынин, Ю. С. Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электричество. -2007. -3. -С. 21-26.
- Бычков, А.Е. Оптимизация новых типов электромеханических преобразователей в электротехнических комплексах/А.Е. Бычков, Д.И. Кашаев, Т.Т. Москов//Вестник ЮУрГУ. Серия «Энергетика». -2011. -Вып. 15. -№ 15 -С. 62-66.
