Синтез тематического слоя объектов транспортной сети

Автор: Федосеев Александр Андреевич, Головнин Олег Константинович, Михеев Сергей Владиславович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-4 т.18, 2016 года.
Бесплатный доступ
Рассматривается вопрос построения тематического слоя объектов транспортной сети на базе космических снимков в условиях отсутствия спектральных признаков. В основе метода лежит использование разработанного в результате анализа характерных признаков объектов транспортной сети фильтра, применяемого к исходному изображению в режиме скользящего окна.
Тематический слой, транспортная сеть, космический снимок, яркость пикселя, ско значений яркости пикселей
Короткий адрес: https://sciup.org/148204779
IDR: 148204779 | УДК: 004.9
Synthesis of transport net objects thematic layer
Method of synthesis of transport net objects thematic layer via remotely sensed images without spectral features is described. Special filter have been developed as the basis of the method.
Текст научной статьи Синтез тематического слоя объектов транспортной сети
Модернизация транспортной инфраструктуры является неотъемлемой частью экономического развития современного государства. Рост числа и протяжённости автомобильных дорог относится к ряду приоритетных мероприятий по модернизации федеральных и региональных транспортных систем. При этом, становится актуальной задача оперативного выявления и учёта изменений объектов сети автомобильных дорог, а также определения характеристик и состояния объектов транспортной инфраструктуры [1]. Значительная площадь территории и большое число субъектов Российской Федерации диктуют необходимость разработки и внедрения подходов к решению указанных задач на основе использования материалов космической съёмки, предполагающих построение соответствующих тематических слоёв с изображением объектов интереса [2].
МЕТОД СИНТЕЗА ТЕМАТИЧЕСКОГО СЛОЯ
В основе процесса синтеза тематического слоя элементов транспортной сети (ТрС) на базе космического снимка лежит задача экстрагирования локальных областей, соответствующих объектам класса «Дорога», на этом снимке в условиях отсутствия пространства спектральных признаков (комплект снимка, состоящий из мультиспектрального и панхроматического изображений) или полного их отсутствия (ком-
плект снимка, состоящий из панхроматического изображения). В первом случае целесообразно использовать методы, позволяющие объединять спектральные свойства мультиспектральных изображений с пространственной информацией монохромных изображений [3–6]. Во втором случае резонно сосредоточиться на подходах объектно-ориентированного анализа изображений с использованием априорных знаний о характерных признаках распознаваемых элементов ТрС [7]. Рассмотрим случай отсутствия на изображении спектральных признаков.
Процесс синтеза тематического слоя элементов ТрС на базе комплекта, представленного монохромным (панхроматическим) изображением, основан на оценке распределения значений яркости целевых объектов исходного изображе- ния с использованием данных о характерных признаках этих объектов.
Объекту класса «Дорога» в каждом канале пространственно-спектрального куба соответствует прямоугольная область
7 ~ R d t i
7 ~ R ~ R 7 ~ R = d j ( a t i , b t ,
~ R a i1' ) ,
„~R 7~R где b i – ширина области, a i – длина области,
~R a i - угол поворота области в заданной системе координат.
Совокупность областей, соответствующих объектам класса «Дорога», обозначим
„ ~ r
D t i
~ р
= { d j } .
Пусть L = {l-} - множество объектов, не являющихся элементами ТрС. Совокупность областей, соответствующих этим объектам, обо-~ ~ значим D li = {d j }.
Для объекта класса «Дорога», ограниченного
7 ~R областью d i , определим следующие основные характерные признаки:
. значительная протяжённость, т.е. ширина
—~R области d i намного меньше её длины
— IR IR R btj < a ti ; (1)
. одинаковая ширина на всём протяжении
—— ~R
b i = const ;
. равномерное распределение функции яркости на участке протяжения, которое означает, что значение среднеквадратического отклонения (СКО) cr[ f ( x , y )] яркости пикселей каждого канала пространственно-спектрального куба,
— ~R принадлежащих области d i , стремится к нулю:
— ~ R
И f ( x , y )] ^ 0, ( x , y ) e d ‘ ;
. чёткие контуры, т.е модуль градиента
V f ( x , y ) функции яркости на границах области
—rr d i превышает среднее значение градиента Vf по всему каждому каналу пространственноспектрального куба:
—~ R
V f ( x , y ) > V f , ( x , y ) e dtl ; ( 4)
— r r
Функция, проверяющая соответствие d i основным характеристикам объектов класса «Дорога», имеет вид:
тов ТрС на космических снимках M ~ n представляет собой математическое описание процесса построения тематического слоя S N на основе исходного снимка I
M ~ N = F ~ N ( I,S N ) .
Тематический слой S N представляет собой
—~R множество элементов d ji , описывающих отдельные объекты ТрС, для каждого из которых функция (5) имеет положительное значение
I N =| <— t i e S N | u ~ R ( cl t i ) = 1 1 ,
^ j = 1, K ~ N
где K ~ n - количество элементов ТрС в темати-
S IN ческом слое S .
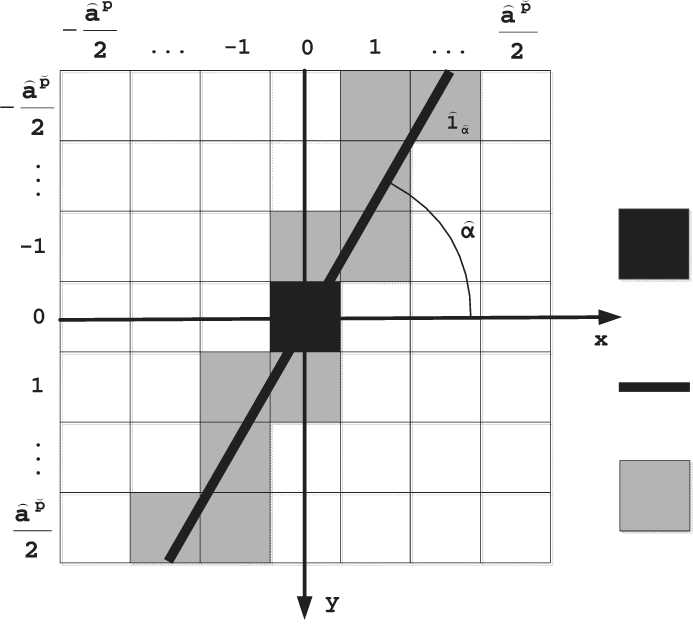
Пусть выбрана некоторая точка (пиксель) p в пределах монохромного (панхроматического)
изображения I p = (x, y).
Для выбранной точки определяется локальная система координат, а также некоторая квад-
R R ui
I R . — I R . _ ,— I R
= u t ( d i ) = [( b t
~ R — ~ R
<< a t i ) л ( b t
^— — ратная область d p
— —
^— с центром в p , заданная
= const ) л ( ^ [ f ( x , y )] ^ 0) л ( V f ( x , y ) > V f )] .
длиной стороны ap (рис. 1):
^ — dp
—- —
= d ( a p , p ) .
Модель синтеза тематического слоя элемен-
^^
Направления
Пиксели, пересекаемые линией l „
Центральный пиксель p
Рис. 1. Иллюстрация процесса определения принадлежности
——
В пределах области d p определим направления, вдоль которых производится дальнейшее исследование. Значение шага ϕ угла поворота соответствующего направления вычисляется следующим образом:
S f ( i , j ) - M^t
D$ l a = i , j ______________________
2 n
π ϕ= , ϕ
a p a ≤i≤
p a — / n
—— при 0 < а < — ,
где N ϕ – количество секторов, на которое разбивается диапазон значений угла поворота [0, п ) . Значение шага ϕ угла поворота соответствующего направления зависит от длины стороны
ap ,.,ap n x — /
< i < при < а < n , 2 2 2
■4
a p a p
--< 1 <---■
2 J 2
———
Z— ^
— а— p области dp. Так, с ростом длины стороны
Z—^—
σ
d l a

d — a
—
——
— a p области d p значение шага ϕ уменьшается. Так как в расчёте участвуют только пиксели, определённые пересекающими их отрезками, построенными в соответствующих направлениях, значение шага ϕ выбирается таким образом, чтобы учесть все возможные комбинации таких пересечений. Направления, соответствующие повторяющимся сценариям пересечений, подлежат исключению.
ч—
Обозначим l а линию пересечения пикселей
—— — области d p в соответствующем направлении под углом а с центром в точке p . Обозначим ч—
— l— d а группу пикселей, пересекаемых линией lа в пределах области dp. Для оптимизации практических вычислений строится таблица всех возможных комбинаций пересечений линией lα пикселей области d p в зависимости от угла его
где f ( i , j ) - значение яркости пикселя, расположенного в i -ой строке и j -ом столбце области d p , n – число пикселей, пересекаемых линией l а под углом а .
Для каждого положения линии l а относительно оси абсцисс в соответствии с (8) находятся — dlα значения СКО σ яркости входящих в область dlа пикселей.
d l α
Среди всех полученных значений σ для всех возможных углов наклона линии l а относительно оси абсцисс определяется среднее значе-
Z—ч
—
-ч— —
наклона α и длины стороны a p области d p .
— l
Если для области d α функция (5) имеет положительное значение, то эта область может с определённой вероятностью считаться принадлежащей элементу ТрС.
Требуется для каждой точки p исходного изображения построить квадратную область Z-S "
d p , в пределах которой для каждой возможной
—l области d α вычислить значения СКО значений
-—S z—■ dlα dlα ние с , а также минимальное значение сmin:
—- d l α
-
— — — S с i ________
-
сd а= J------, i = 0, N— —— ;(9)
N ’ ’ dlа ’ dlα
-
• ч 1 • ч 1 * Ч •—Ч 3 • ч
-
l а а1 а — l — l r а — l
С mm = с mm ( d а , p ) = min( c d ( d а , p , а ) ,(10) α
где N l d α
—
- число областей dl а , образованных
пересечением пикселей области d p линией l а.
Для всех возможных областей dl а , образо-
ванных пересечением пикселей этих областей
яркости пикселей, входящих в область d l
—
- -
α , и из
этих значений определить минимальное для дальнейшего анализа.
линией l а , проверка условий (3) и (4) выглядит следующим образом:
-Ч ч—
1 <
Область d α
чч чч
~ — — — l ,— — l ,— — — l
f ( i , d l 5 ) = [( k d - ^ mn i > t-p ) a ( ^ mm ^ 0)] ,(11)
1 I
характеризуется математиче-
ским ожиданием M
*—ч '~™■ lα lα d , дисперсией D d и СКО
^— d l а
σ
значений яркости этих пикселей:
M d l α
S f ( i , j )
i . j
—-
2 n z—-4
a p
, у < i <
-
a p — . n
— при 0 < а < — ,
-
где Tp - устанавливаемое пороговое значение, определяющее минимально допустимую разницу модуля градиента функции яркости на границах области объектов ТрС и среднего значения функции яркости контуров объектов на изображении I .
l
Области d α , для которых функция (11) положительна, подлежат дальнейшей дополнительной проверке, в соответствии с которой модуль разности значений яркости каждого пикселя области l d α и яркости пикселя p не должен превышать
ч-ч
ч-ч
ч-ч p
»“/•/« П —, _
< i < при < а < n , 2 2 2
a
π
a ' . ap
--< i <---■
2 J 2
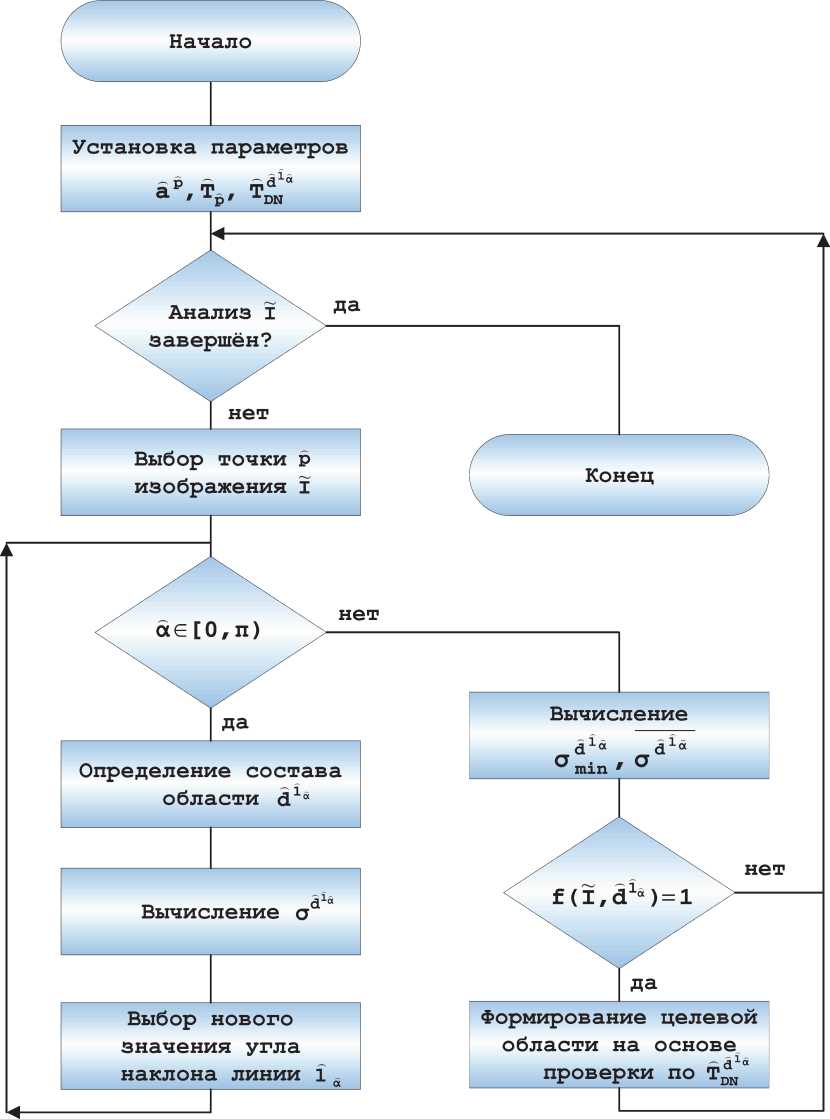
Рис. 2. Схема работы метода экстрагирования элементов ТрС на базе объектно-ориентированного подхода
p d а некоторого порогового значения TDN :
P- P P-
P 1 - P1 P P. P1 P
| DN d a - DN d a | < T ^N , (12)
где DN d'a - значение яркости i -го пикселя, вхо-
P l P d a дящего в область d a , DNp - значение яркости пикселя p.
Схема работы метода экстрагирования элементов ТрС на базе объектно-ориентированного подхода представлена на рис. 2.
ЗАКЛЮЧЕНИЕ
Описанный подход обеспечивает экстрагирование элементов ТрС на космических снимках высокого разрешения в условиях отсутствия спектральных признаков на базе объектно-ориентированного подхода. Получаемые результаты обеспечивают построение тематического слоя элементов ТрС.
Список литературы Синтез тематического слоя объектов транспортной сети
- Федосеев А.А., Михеев С.В., Головнин О.К. Технология Data Mining в задачах прогнозирования развития транспортной инфраструктуры //Современные проблемы науки и образования. 2013. № 1. URL: http://www.science-education.ru/107-8153 (дата обращения 08.09.2016).
- Михеев С.В., Федосеев А.А., Головнин О.К. Учёт мультиколлинеарных атрибутов пространственно-распределённых данных, полученных с помощью беспилотных летательных аппаратов//Известия Самарского научного центра Российской академии наук. 2015. Т. 17. № 2 (5). С. 1053-1057.
- Csatho J.F., Schenk A.F. Multi-sensor data fusion for automatic scene interpretation//International archives of photogrammetry and remote sensing. 1998. Vol. 7. Pp. 336-341.
- Gao J., Wu L. Automatic extraction of road networks in urban areas from Ikonos imagery based on spatial reasoning . URL: http://www.isprs.org/proceedings/XXXV/congress/comm3/papers/290.pdf.
- Shrivakshan G., Chandrasekar C. A comparison of various edge detection techniques used in image processing//International journal of computer science issues. 2012. Vol. 9. Issue 5. No. 1. Pp. 269 -276.
- Zhang Y. Texture-Integrated classification of urban treed areas in high-resolution color-infrared imagery//Photogrammetric engineering and remote sensing. 2001. Vol. 67. Pp. 1359 -1365.
- Change detection from remotely sensed images: From pixel-based to object-based approaches/M. Hussain //ISPRS Journal of photogrammetry and remote sensing. 2013. Vol. 80. Pp. 81-106.
