Синтез управления маневром уклонения беспилотного летательного аппарата с учетом терминальных ограничений

Автор: Половинчук Николай Яковлевич, Иванов Станислав Валерьевич, Котельницкая Любовь Ивановна
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.18, 2018 года.
Бесплатный доступ
Введение. Статья посвящена решению задачи формирования субоптимальной стратегии уклонения беспилотного летательного аппарата в условиях неопределенности текущих характеристик движения и будущей стратегии поведения противодействующего ЛА, управление которым формируется с максимальной эффективностью. При этом траектория маневрирующего ЛА должна удовлетворять требованиям оптимальности некоторых заданных функций фазовых переменных в конечный момент времени и условиям прохождения его траектории через заданную терминальную область пространства. Начальные условия и динамические возможности уклоняющегося и противодействующего ЛА в начальный момент времени считаются известными. Управление уклоняющимся ЛА формируется его бортовыми средствами навигации и наведения в реальном масштабе времени на основе нелинейного позиционного управления с обратной связью. Целью работы является построение алгоритма решения задачи синтеза терминально-оптимального управления движением центра масс высокоскоростного беспилотного летального аппарата, позволяющего осуществлять поиск оптимального управления в функции текущих координат объекта. Рассмотрение задачи в такой постановке отличает ее от классических конфликтных задач о преследовании, решаемых с привлечением теории дифференциальных игр и требует поиска эффективных в вычислительном отношении способов ее решения. Материалы и методы. Наиболее эффективными для беспилотных ЛА, функционирующих в условиях интенсивных возмущений, жестких ограничений на фазовые переменные и управление, являются так называемые методы оптимального терминального управления, реализующие адаптивные алгоритмы с прогнозом. Поэтому решение сформулированной задачи может быть получено именно на основе использования их идеологии. Результаты исследования. Разработан новый метод кусочно-программного терминального управления движением беспилотного ЛА, отличающийся от известных тем, что основан на процедуре поиска стратегии управления по критерию наилучшего гарантированного результата с учетом терминальных ограничений. Разработана методика расчета стратегии управления маневром уклонения ЛА в медленном контуре терминальной системы управления, отличающаяся тем, что вместо процедуры прогноза в ускоренном времени и расчета невязок используется процедура преобразования краевой задачи в одноточечную задачу интегрирования системы обыкновенных дифференциальных уравнений, учитывающая наличие ненулевого терминального члена в целевом функционале. Обсуждение и заключения. Несмотря на то, что формирование субоптимальной стратегии наведения в терминальную область уклоняющегося ЛА осуществляется не в форме синтеза, программное управление адаптируется к текущим условиям. Это достигается за счет итерационной процедуры регулярного пересчета терминальных условий, что эквивалентно периодическому замыканию обратной связи. Таким образом, выведение уклоняющегося ЛА в заданную терминальную область осуществляется программно, а управление уклонением от противодействующего ЛА формируется в форме синтеза. Ограничениями на метод являются условия, что модель движения противодействующего ЛА известна и он формирует естественное управление с целью перехвата уклоняющегося ЛА.
Летательный аппарат, перехватчик, уклонение, терминальные условия, траектория, двухточечная краевая задача, управление
Короткий адрес: https://sciup.org/142214943
IDR: 142214943 | УДК: 62-50 | DOI: 10.23947/1992-5980-2018-18-2-190-200
Synthesis of evasive maneuver control of unmanned aerial vehicle for terminal restrictions
Introduction. The solution to the problem of development of suboptimal evasive strategy of unmanned aerial vehicle (UAV) under the conditions of uncertainty of the current motion characteristics, and the future behavior strategy of the interdictor is considered. The FV (flying vehicle) control is organized with maximum efficiency. Herewith, the maneuvering FV trajectory must satisfy the requirements of optimality for some given functions of the phase variables at the final time and the conditions of its path through a specified terminal area space. The initial conditions and the dynamic facilities of the evading and opposing FV at the initial time are assumed to be known. The evading FV control is developed by its onboard guidance and navigation system in real time on nonlinear position feedback control. The work objective is to build an algorithm for solving the problem of synthesis of terminal optimal control of motion of center of mass of high-speed UAV that allows searching for the optimal control in function of the current coordinates of the object. Consideration of the problem in this formulation distinguishes it from the classical conflict tasks on the prosecution to be solved with the involvement of the theory of differential games, and demands computationally efficient solution methods. Materials and Methods. For the UAV operating under the conditions of violent disturbances, the most effective hard constraints on the phase variables and control are the so-called methods of optimal terminal control that implement adaptive algorithms with projection. Therefore, the solution to the formulated problem can be obtained precisely with the use of their ideology. Research Results. A new method of piecewise-software terminal control of the UAV motion is developed. It differs from the known ones in that it is based on the procedure of searching a control strategy upon the best guaranteed result with the terminal restrictions. A methodology for calculating the management strategy for the FV evasive maneuver in a slow loop of the terminal control system is worked out. It is characterized in that instead of the forecast procedure in speed-up time and calculation of residuals, the conversion of a boundary value problem to a one-point task of integration of the ordinary differential equations system with account for the occurrence of non-zero terminal member in the cost functional, is used. Discussion and Conclusions. Despite the fact that the development of a suboptimal guidance strategy in the terminal area of the evading FV is not in the form of synthesis, the control software adapts to the current conditions. This is achieved through the iterative procedures of regular recalculation of terminal conditions that are equivalent to the periodic circuit feedback. Thus, the evading FV is brought to a specified terminal area through software, while evading an interdictor is developed as synthesis. Limitations to the method are the terms that the movement model of the opposing FV is known, and it forms a natural control of the evader intercept.
Текст научной статьи Синтез управления маневром уклонения беспилотного летательного аппарата с учетом терминальных ограничений
2,3Don State Technical University, Rostov-on-Don, Russian Federation
Введение. Рассматривается задача формирования субоптимальной стратегии уклонения беспилотного летательного аппарата (ЛА) в условиях неопределенности текущих характеристик движения и будущей стратегии поведения противодействующего ЛА. При этом траектория уклоняющегося ЛА должна удовлетворять требованиям оптимальности некоторых заданных функций фазовых переменных в конечный момент времени, определяющих условия прохождения его траектории через заданную терминальную область пространства.
Начальные условия и динамические возможности уклоняющегося и противодействующего ЛА в начальный момент времени считаются известными. Управление уклоняющимся ЛА формируется за счет автономных средств его бортовой системы управления в реальном масштабе времени.
Целью работы является построение эффективного в вычислительном отношении метода решения задачи синтеза терминально-оптимального управления движением беспилотного уклоняющегося ЛА в вышеназванных условиях.
Рассмотрение задачи в такой постановке отличает ее от классических конфликтных задач о преследовании, решаемых с привлечением теории дифференциальных игр, и требует поиска эффективных в вычислительном отношении способов ее решения [1]. Необходимость такой постановки задачи обусловлена ограниченными возможностями бортовых цифровых вычислительных машин (ЦВМ) беспилотных ЛА.
Материалы и методы. Процесс полета уклоняющегося ЛА описывается вектором фазового состояния y ( t ), противодействующего — вектором z ( t ), где y ∈ Rn , z ∈ Rm .
Динамика взаимного движения описывается нелинейными дифференциальными уравнениями следующего вида:
Машиностроение и машиноведение
y ( t ) = fy ( У , t ) + g u (u , У , z , t), y(t 0 ) = У о , (1)
z ( t ) = f ( z , t ) + g v ( v , z , y , t ), z(t 0 ) = z 0 , (2)
где f y, f z, gu, gv — функции своих аргументов, непрерывные и дифференцируемые достаточное число раз; u, v — функции управления соответственно уклоняющимся и противодействующим ЛА, ( u е R , v е Rp ) ;
t g [ t 0, t k ] — время решения задачи уклонения, t 0 и t k , соответственно, моменты начала и окончания процесса уклонения [2].
Для решения задачи заданы некоторые компоненты вектора состояния уклоняющегося ЛА в конечный момент tk i-x
y( tk ) = y, где (i' = 1,n,, n, < n), а yi являются заданными краевыми значениями состояния ЛА, образующими требуемую терминальную область, являющуюся гладким многообразием следующего вида:
уА t k ) - У =ф yi ( У , t k ) = 0, i = 1, П 1 , (3)
где Фy — векторная функция размерности n , х 1.
Условиями задачи задается также требование оптимизации (предположим — максимизации) известной скалярной функции остальных n 2 ( n , + n 2 = n ) фазовых переменных вектора y ( t k ):
L [ У п , + i ( t k ) , y n +2 ( tk ) ,-, y n + n 2 ( tk ) ; t k ]= L ( y , t k ) . (4)
В общем случае противодействующий ЛА может быть задействован в любой момент движения уклоняющегося ЛА по траектории, проходящей через терминальную область (3). Этот момент времени t 0 начала реализации игры, а также начальные условия свои и противодействующего ЛА в соответствии с ранее принятым допущением на борту уклоняющегося ЛА определяются мгновенно и точно. Задачей уклоняющегося ЛА в дальнейшем является формирование стратегии уклонения с учетом терминальных ограничений (3), (4). В таком случае общее время реализации игры заранее неизвестно и конечный момент времени tk не фиксирован. Поэтому и в соответствии с общепринятым подходом будем считать t k параметром ( tk < t k , tk — максимальное время решения задачи, определяемое физическими возможностями игроков, запасами энергии и др.), который должен быть выбран в дополнение к управляющей функции уклоняющегося ЛА u ( t ) так, чтобы минимизировать время игры [3].
Процесс взаимного движения уклоняющегося и противодействующего ЛА заключается в следующем.
Целью управляемого движения уклоняющегося ЛА с момента t 0 является максимизация расстояния от противодействующего ЛА в момент tk , а противодействующего ЛА, наоборот, минимизация этого расстояния.
Соответственно управляющие функции ЛА u ( t ) и v ( t ) в процессе взаимного полета уклонения-противодействия должны обеспечивать максимум для уклоняющегося и минимум для противодействующего заданной неотрицательной скалярной функции L2 ( y,z,t ) , характеризующей расстояние между ЛА.
Рациональным является подход, учитывающий ограниченность времени процесса уклонения-противодействия, за счет естественной ограниченности на борту взаимодействующих ЛА энергетических ресурсов, расходуемых на реализацию формируемых управлений, заданных интенсивностями управлений, соответственно:
tk r tk p
I u = JZ kiu? ( t ) d t и I v = JZ k jvA ( t ) d t .
1 0 i =1 1 0 j =1
Тогда задачу нахождения допустимых оптимальных стратегий управления u0 ( t ) и v0 ( t ) необходимо решать
в условиях максимина:
J ( u 0, v 0 ) = max min uv
tkrL 1
- J ( u, v ) = Li ( y, tk )+Jj L2 ( y, z, t) + -( v (t) Kiv ( t )-u tn ^ 2
tk
( t ) K 2 u ( t ) ) ^ d t ^ , (5)
t 0
где K 1, K2— симметричные положительно определенные матрицы соответствующих размерностей [4].
Рассмотрение такой задачи в классической постановке математического аппарата дифференциальных игр является затруднительным ввиду особенностей реализации взаимного движения.
Значительный объем публикаций, посвященных решению игровых задач в классической постановке, предопределяет существенные трудности учета всех известных концепций [2, 5, 6]. В общем случае подходы, использующие альтернативное локальное условие существования седловой точки, требуют при их реализации значительных вычислительных затрат при решении задачи (1)–(5), что обусловлено сложностью интегрирования системы уравнений в частных производных Айзекса и необходимостью достижения условий (3), (4). Поэтому необходимо учитывать обстоятельство, что в сформулированной частной задаче требуется получить решение с точки зрения интересов только лишь одного игрока — уклоняющегося ЛА [7]. В этом случае является целесообразным использование одного из частных подходов, который обеспечивает возможность построения эффективного в вычислительном отношении бортового алгоритма реализации оптимальной стратегии управления уклоняющимся ЛА. Алгоритм базируется на сведении исходной игровой задачи уклонения-перехвата к задаче одностороннего управления уклоняющимся ЛА и исключении требования по выполнению условия существования седловой точки.
На основании этого подхода решение задачи поиска оптимальной стратегии управления для уклоняющегося ЛА u 0( t ) будет уже осуществляться не из условия (5), а из более узкого условия следующего вида:
J [ u °; v ( z , y , t ) ] = max { J [ u , v ( z , y , t ) ] } . (6)
При этом управляющая функция противодействующего ЛА v ( z , y , t ) в задаче (1)-(4) с учетом (6) формируется на собственных наблюдениях за движением уклоняющегося ЛА для его перехвата. Также при решении задачи необходимо учитывать, что противодействующее ЛА имеет возможность воспользоваться любым неоптимальным поведением уклоняющегося ЛА и его замкнутое управление формируется «наилучшим» образом по принципу обратной связи без запаздывания [7].
Подход к решению подобной задачи, но без учета терминальных ограничений вида (3) рассмотрен в работе [8]. Здесь решение основано на поиске субоптимального управления движением ЛА, описываемым квазилинейными дифференциальными уравнениями в частных производных, а его недостатком является сложность технической реализации ЦВМ беспилотного ЛА.
В данной работе приводится эффективная в вычислительном отношении методика, в которой для формирования субоптимальной стратегии уклоняющегося игрока используется преобразование двухточечной краевой задачи (ДТКЗ) к одноточечной задаче интегрирования системы обыкновенных дифференциальных уравнений на основе метода инвариантного погружения (МИП) [8].
Однако применение МИП затруднительно для случаев, когда время решения задачи tk . не фиксировано и целевой функционал содержит неквадратичную терминальную составляющую [7]. Поэтому на данном шаге вместо МИП используется метод решения краевой задачи, рассмотренный в работе [9].
Тогда получается следующее решение задачи формирования субоптимальной стратегии управления уклоняющегося ЛА u 0 ( t )в конфликтной задаче о преследовании с терминальными ограничениями и незаданным временем реализации игры (1)–(4), (6).
Для динамической системы в игровой задаче уклонения-перехвата
Машиностроение и машиноведение
x ( t ) = f ( x , t ) + g ( x , u , v , t ) , x ( t 0 ) = X o , X o =| y 0 z 01 ” , (7)
совокупность необходимых условий экстремума функционала (6), определяющих оптимальную стратегию управления уклоняющегося игрока u0 (t) при условии, что противодействующий ЛА формирует позиционное управление с обратной связью v (x, t) имеет вид [2, 8]: , где x =|y z”, x e R"+m, f =|fy fl” , g =|gu gv”,
H ( x , u , v , X , t ) = - L 2 ( x , t ) - 0.5 v T ( x , t ) K 1 v ( x , t ) + 0.5 u T ( t ) K 2 u ( t ) +
+X ” (t) f ( x, t ) + X ” (t) g ( x, u, v, t), v (x, t ) = K1-1 0
a g v ( x , v , t ) d v
X ( t ) ,
- min { H [ x ( t ) , u ( t ) , v ( x , t ) , X ( t ) , t ] } = - min { 0.5u T ( t ) K 2 u ( t ) + X ( t ) g ( x , u , v , t ) } = H ( x , X , t ) , при этом сформированная субоптимальная траектория x ( t ) и вектор сопряженных переменных X ( t ) описываются следующими уравнениями ДТКЗ:
x ( t ) = f ( x , t ) - G v ( x , X , 1 ) ” X ( t ) — 2
-G. (x, X, t) £ 11 т 5H (x, X, t) = v ox ^ Hj dX
f x ( x , X , t ) , x ( t 0 ) x 0 ,
G v ( x , X , t ) = ° g< x ,X , t ) K
o g ( x , X , t ) o v
X ( t J^ 1 _№0 1 X ( t ) + 1 Px ( t ) т r d G ^( x 1 £ ) ®x( t ) )! + o H ( x , x , t ) = f x ( x , X , t ) , o x o .x 2 ^ d x J o x
X i ( t k ) = <
Y i , i = 1, n i , o L i ( x , t k ) — . o x
i = n + 1, n 1 + n 2, x = x ( tk ) ,
Y = - M y- 1 Y ,
tk
M Y = J л т ( t )
t 0
a g u ( x , u , t ) d u
8g, (x , u , t )! z x t k , xdg, (x , u , t ) f z x , x og, (x , u , t )!
u(,, , ) Л(t)dt,7 = |лт (t) u( , , )luт (t)K2 +Xт (t) u ( , , ) [ dt, ou , ou
-I t0 IJ
u = u 0 ( t ) ,
Л(,)= j№M 1" +rog(x;u;1) 1" 1A(,) , л( tk ) = | I 0 r, OX
л где 0 — введенная в [7] операция блочного произведения блочных матриц; y — постоянный вектор n1 х 1
множителей Лагранжа для терминальной (геометрической) связи (3); Л , Мy , y — матрицы n х n 1 , n 1 х n 1 и
вектор n 1 х 1 соответственно; I — единичная матрица размерности n 1 х n 1 .
Время окончания игры t k находится при этом из дополнительного скалярного уравнения
0 L1 ( x ’ tk ) + H ( x , u 0, v , X , tk ) = 0, o tk v k
где j = j ( t k ) для j = x , u °, v , X .
Существование обратной матрицы Мy 1 определяется условием управляемости преследуемого объекта
и, кроме того, m конечных условий для X ( tk ) не определены [10].
Для простоты рассуждений можно воспользоваться упрощенным способом преобразования краевой задачи к одноточечной задаче интегрирования системы обыкновенных дифференциальных уравнений, при интегрировании которой вместо оптимальной траектории x ( t ) получают приближение x ( t ) [11].
Обозначим
Q ( x , t k ) = Y
0 L i ( x , tk )
0 x i
x = x ( t k ) .
Тогда вместо соотношений (8)-(10) получим:
x ( t ) = M 1 ( x , Q , t )
х
0 Q ( x , t )
0 x
M 1 ( x , Q , t ) - M 2 ( x , Q , t )
-1
х
0 Q ( x , t ) , x , xll / x
--- ---- fx ( x , Q , t ) + f x ( x , Q , t ) k fx ( x , Q , t ) , 0 x
0 fx ( x , Q , t ) z . Of ( x , Q , t ) z x
M1 (x, Q, t) = Jx (,v' ) M1 (x, Q, t)+ Jx (’^ ) M2 (x, Q, t), ox o^^
0 f ( x , Q , t ) z x of ( x , Q , t ) z x
M2 (x, Q, t) = 2x1^2M1 (x, Q, t)+ A( )M2 (x, Q, t), ox ox
где Q = Q ( x , t ) , x = x ( t ) .
d x ( xn ( t ), t ) , дХ ( Хп ( t ), t )
Для матриц чувствительности M1 =---0---- и M2 =----0---- заданы начальные условия следую-
-
1 дХ 0 2 дХ 0
щего вида:
M1 = 0; M 2 = E, (15)
где E — единичная матрица размерности ( n + m ) х ( n + m ) .
Результатом интегрирования системы дифференциальных уравнений (12-15) является субоптимальная программная траектория уклоняющегося ЛА x(t ) = | y ( t ) T z(t ) T | , которая обеспечивает его уклонение от противодействующего ЛА и доставку полезной нагрузки в требуемую конечную область (3).
Синтезируемая субоптимальная траектория x ( t ) адаптируется к текущим условиям функционирования уклоняющегося ЛА по результатам идентификации его динамических характеристик.
Траектория получена на основе представления о наиболее вероятных действиях противодействующего ЛА для перехвата уклоняющегося ЛА и с учетом ограниченности энергетики уклоняющегося ЛА в задаче приземления в заданную область (3). Однако стратегия поведения, основанная на однократно определенной программной траектории, не обладает свойством адаптации и приводит к большим методическим ошибкам [12, 13].
Исходя из того, что решение двухточечной краевой задачи получено приближенным методом и модель движения обоих игроков не всегда адекватна функционированию реальных ЛА, необходимо увеличивать частоту обновления навигационных измерений (уменьшить такт решения навигационной задачи). Это в конечном счете приведет к получению близкого к оптимальному (субоптимальному) решения задачи оптимального управления в форме синтеза. При этом устойчивость решения задачи может быть обеспечена рациональным выбором такта для контура наведения ЛА.
Использование алгоритмов с прогнозированием для ЛА различного назначения показало их высокую эффективность вследствие присущего им свойства адаптации к текущим условиям полета и изменяющимся характеристикам ЛА [14, 15, 16].
Применение для маневрирующих беспилотных ЛА оптимального терминального управления для разработки адаптивных алгоритмов с прогнозом обеспечивает высокое качество их функционирования в условиях действия возмущений большой интенсивности при наличии жестких ограничений на параметры траектории и управление [7].
По этой причине окончательный выбор решения сформулированной задачи может быть сделан в пользу использования методологии синтеза алгоритма с прогнозирующими моделями [14].
Методика формирования управления уклоняющимся ЛА в форме синтеза основывается на следующем [17].
С использованием текущих навигационных измерений определяются начальные условия x(t 0 ) = x 0 ( j = 0, 1, 2,... — номер итерации в блоке), и в длиннопериодическом («медленном») контуре решения задачи
Машиностроение и машиноведение
наведения прогнозируется субоптимальная траектория xj (t) на последующий интервал движения уклоняющегося ЛА t е[10, T] (t° = 10, 10 > 10). В короткопериодическом («быстром») контуре решается задача стабилизации движения ЛА относительно субоптимальной траектории x (t) на интервале времени до пересчета управле- ния в контуре наведения.
В течение одной итерации построения программной оптимальной траектории в «медленном » контуре наведения по текущей навигационной информации y (10) в «быстром» контуре стабилизации выполняется не сколько итераций [18]. При этом задача навигации решается с тактом, меньшим или равным такту «быстрого» контура [19]. Соответственно, такт решения задачи в «быстром» контуре определяется динамическими характеристиками уклоняющегося ЛА для обеспечения требований устойчивости, управляемости и др., а такт длиннопериодического контура ограничен вычислительными характеристиками бортовой ЦВМ. Такое кусочнопрограммное управление на интервале времени медленного контура при уменьшении такта будет стремиться к замкнутому управлению в форме синтеза [2].
Результаты исследования. С целью проверки работоспособности, реализуемости и оценки характеристик вычислительной эффективности представленного подхода было выполнено численное моделирование . В качестве уклоняющегося ЛА использовалась модель гипотетического беспилотного летательного аппарата, технические характеристики которого заданы в соответствии с приведенными в работе [20].
Так как полная модель такого типа ЛА обладает чрезмерной сложностью и трудоемкостью, то приняты упрощающие допущения о линейной аппроксимации коэффициентов аэродинамических сил и моментов. В этом случае размерность модели равна 12, она линейна относительно вектора управления и в векторной форме имеет вид (1). С целью упрощения численных исследований рассматривался участок полета в плоскости движения без маневрирования по углу атаки в течение временного интервала T=100 с. Поэтому углы разворота рулей высоты и направления задавались постоянными и равными 0, а управление формировалось только за счет изменения силы тяги ЛА, действующей вдоль его продольной оси.
Модель противодействующего ЛА задана ракетной осесимметричной схемой, а его движение определялось в той же системе координат и в той же плоскости движения и описывалось четырьмя известными детерминированными дифференциальными уравнениями, которые в векторной форме имели вид (2) [15, с. 79]. При этом «неизвестное» уклоняющемуся ЛА управление противодействующего ЛА синтезировалось оптимально по принципу Беллмана — путем минимизации функции промаха [21, 22]
Q [ У ( tk ) , z ( tk ) ] = 0,5 ( k 1 ( У 1 - z 1 ) 2 + k 2 ( У 2 - z 2 ) 2 )
t = t k
где y i , z i — компоненты фазовых векторов объектов (их координаты в плоскости стрельбы); k i — масштабирующие коэффициенты ( i=1,2).
При этом использовалось предположение, не влияющее на общность полученных результатов, что противодействующему ЛА «мгновенно» известна текущая информации о взаимном расположении обоих ЛА и его управление синтезируется без временной задержки [2, 8, 15].
Для моделирования было выбрано два практических случая управления уклоняющимся ЛА. В первом случае формировалось программное релейное управление с одним переключением на 30-й секунде полета с режима полета с уровнем средней тяги на форсированный режим с уровнем максимальной тяги. Моделирование показало, что ЛА перехватывал уклоняющийся ЛА на 61-й секунде, т.е. задача уклонения с положительным исходом не решалась.
При моделировании второго случая процесса уклонения синтезировалось управление уклоняющимся ЛА на основе сформированной методики из условия максимизации функции промаха (16). При учете энергетических возможностей обоих ЛА и использовании сформированного исходного критерия вида (5) оптимальная функция управления тягой двигательной установки уклоняющегося ЛА РЛА (t) имела релейный вид с двумя переключениями с минимального значения уровня тяги P min на максимальный уровень P max .
Моделирование подтвердило эффективность такой стратегии управления. Задача уклонения решалась с положительным исходом.
Таким образом, моделирование подтвердило, что формирование управления с возможностью переключения тяги двигательной установки с кратностью два и более обеспечивает большую техническую возможность уклонения и адаптации к характеристикам противодействующего ЛА.
При моделировании размерность системы дифференциальных уравнений, интегрируемой в прямом времени, была равна 380.
Требуемое быстродействие бортовой ЦВМ системы управления составило величину не более 1.4*10 5 Коп/сек, для числа операций контура наведения —около 7*10 4 Коп с тактом 0,5 сек. Это подтверждает возможность реализации алгоритма управления в реальном масштабе времени на современных ЦВМ [15, 19].
Применение для формирования управления традиционного минимаксного подхода на основе решения уравнений в частных производных приводит к алгоритму, включающему реализацию дополнительных специализированных численных методов, существенно увеличивающих вычислительные затраты, и в рассмотренном случае высоких размерностей динамических объектов (12 и 4 соответственно) практически нереализуемо на борту в реальном масштабе времени [23].
Результаты моделирования приведены на рис. 1-3.
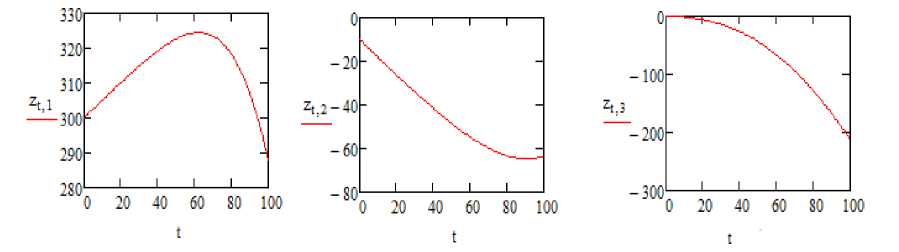
Рис. 1. График линейных скоростей беспилотного ЛА по осям x,y,z (м/с)
Fig. 1. Graph of linear velocities of unmanned aerial vehicle (UAV) along x,y,z axes (m/s)
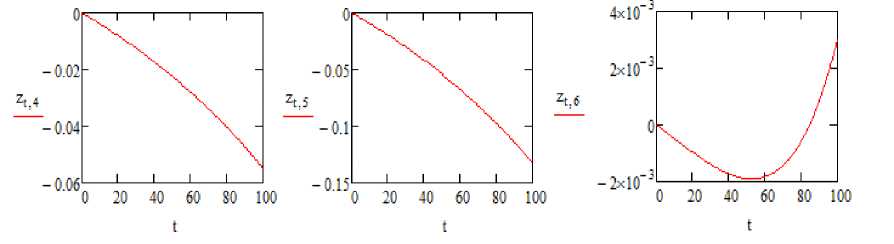
Рис. 2. График угловых скоростей беспилотного ЛА по осям x,y,z (рад/с)
Fig. 2. Graph of angular velocities of UAV along x,y,z axes (rad/s)
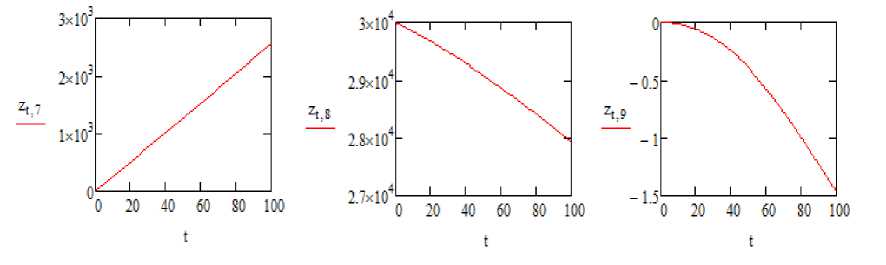
Рис. 3. График координат движения беспилотного ЛА по осям x,y,z (м)
Fig. 3. Graph of movement coordinates of UAV along x,y,z axes (m)
Результаты моделирования процесса уклонения ЛА демонстрируют работоспособность алгоритма и возможность его реализации на современных бортовых ЭВМ в реальном времени.
Обсуждение и заключения. Несмотря на то, что формирование субоптимальной стратегии наведения уклоняющегося ЛА в заданную терминальную область осуществляется не в форме прямого синтеза, многошаговый пересчет программного управления позволяет адаптироваться к текущим условиям. Это достигается за счет многошаговой итерационной процедуры регулярного пересчета терминальных условий, что эквивалентно периодическому замыканию обратной связи. Таким образом, выведение уклоняющегося ЛА в заданную терминальную область осуществляется программно, а управление уклонением от противодействующего ЛА эквивалентно формированию управления в форме синтеза. Ограничениями на применение метода являются условия, что модель движения противодействующего ЛА известна и он формирует естественное управление с целью перехвата уклоняющегося ЛА.
Машиностроение и машиноведение
Список литературы Синтез управления маневром уклонения беспилотного летательного аппарата с учетом терминальных ограничений
- Красовский, Н. Н. Позиционные дифференциальные игры/Н. Н. Красовский, А. И. Субботин. -Москва: Наука, 1974. -254 с.
- Щербань, И. В. Методика синтеза управления маневром уклонения игрока уклоняющегося ЛА в медленном контуре терминальной системы управления/И. В. Щербань, С. В. Иванов//Двойные технологии. -2010. -№1.-С. 59-64.
- Атанс, М. Оптимальное управление/М. Атанс, П. Фалб. -Москва: Машиностроение, 1968. -764 с.
- Федоров, В. В. Численные методы максимина/В. В. Федоров. -Москва: Наука, 1979. -278 с.
- Красовский, Н. Н. Игровые задачи о встрече движений/Н. Н. Красовский. -Москва: Наука,1970. -420 с.
- Понтрягин, Л. С. Избранные научные труды. Т.2. Дифференциальные уравнения. Теория операторов. Оптимальное управление. Дифференциальные игры/Л. С. Понтрягин. -Москва: Наука, 1988. -575 с.
- Соколов, С. В. Решение задачи синтеза оптимального управления в конфликтной задаче/С. В. Соколов, И. В. Щербань//Изв.РАН. ТиСУ. -2003. -№5. -С.35-40.
- Shcherban I.V. An efficient suboptimal algorithm for player-ally control in a conflict problem//Journal of Computer and Systems Sciences International. 2007. vol. 46, No. 1. p. 3-8.
- Барков, В. В. Краевая задача оптимального управления нелинейными детерминированными системами/В. В. Барков, Ю. А. Кочетков//Известия РАН. Теория и системы управления. -1995. -№6. -С. 184-193.
- Баратова, Е. Д. Метод штрафов и необходимые условия оптимальности в дифференциальной иерархической игре при неопределенности/Е. Д. Баратова, А. Ф. Тараканов//Изв. РАН. ТиСУ. -2003. -№ 3. -С.30-36.
- Соколов, С. В. Оптимальное управление спуском космического аппарата в возмущенной атмосфере/С. В. Соколов, И. В. Щербань//Известия РАН. ТиСУ. -1999.-№1. -С.138-143.
- Первачев, С. В. Адаптивная фильтрация сообщений/С. В. Первачев, А. И. Перов. -Москва: Радио и связь, 1991. -160 с.
- Буков, В. Н. Адаптивные прогнозирующие системы управления полетом/В. Н. Буков. -Москва: Наука, 1987. -230 с.
- Половинчук, Н. Я. Методы и алгоритмы терминального управления движением летательных аппаратов: монография/Н. Я. Половинчук, И. В. Щербань. -Москва: МО РФ, 2004. -290 с.
- Половинчук, Н. Я. Терминальное наведение баллистических летательных аппаратов: монография/Н. Я. Половинчук. -Москва: МО РФ, 2004. -138 с.
- Половинчук, Н. Я. Проектирование систем управления ракет-носителей и межконтинентальных баллистических ракет/Н. Я. Половинчук, А. А. Ардашов. -Ростов-на-Дону: РВИРВ, 2010.-242 с.
- Половинчук, Н. Я. Синтез алгоритма терминально-оптимального управления высокоскоростным маневрирующим летательным аппаратом/Н. Я. Половинчук, С. В. Иванов//Двойные технологии. -2017. -№2. -С. 9-13.
- Аппазов, Р. Ф Методы проектирования траекторий носителей и спутников Земли/Р. Ф. Аппазов, О. Г. Сытин. -Москва: Наука, 1987. -440 с.
- Разоренов, Г. Н. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями): учебник для вузов/Г. Н. Разоренов, Э. А. Бахрамов, Ю. Ф. Титов. -Москва: Машиностроение, 2003. -584 с.
- Соколов, С. В. Теоретические основы синтеза автономных помехоустойчивых бесплатформенных навигационных систем: монография/С. В. Соколов, Н. Я. Половинчук. -Ростов-на-Дону: МО РФ, 1998. -340 с.
- Гурман, В. И. Вырожденные задачи оптимального управления/В. И. Гурман. -Москва: Наука, 1977. -304 с.
- Брайсон, А. Прикладная теория оптимального управления/А. Брайсон, Хо Ю-Ши. -Москва: Мир, 1972. -402 с.
- Пантелеев, А. В. Теория управления в примерах и задачах/А. В. Пантелеев, А. С. Бортаковский. -Москва: Высшая школа, 2003.-585 с.
