Синтез закона регулирования привода глубинного штангового насоса в автоматическом режиме

Автор: Садов Виктор Борисович
Статья в выпуске: 1 т.14, 2014 года.
Бесплатный доступ
Рассматривается задача синтеза закона регулирования нефтедобывающего оборудования. Приведен краткий анализ возможностей использования различных методов управления. Даны формулы и алгоритмы использования прогнозирующего управления и метода прямой минимизации целевого критерия. Показаны результаты цифрового моделирования приведенных алгоритмов, сделаны выводы по возможности использования данных подходов.
Управление, моделирование, нефтедобыча
Короткий адрес: https://sciup.org/147154951
IDR: 147154951 | УДК: 622.276:62.52
Regulation law synthesis of the drive deep rod pump in automatic mode
In article the problem of synthesis of the law of regulation of the oil-extracting equipment is considered. The brief analysis of opportunities of use of various methods of management is resulted. Formulas and algorithms of use of predictive control and a method of direct minimization of target criterion are given. Results of digital modelling of the resulted algorithms are shown, conclusions whenever possible uses of the given approaches are made.
Текст научной статьи Синтез закона регулирования привода глубинного штангового насоса в автоматическом режиме
Привод глубинного штангового насоса при работе в автоматическом режиме, как правило, для цели управления использует только одну варьируемую величину – количество двойных ходов механизма в минуту n . Если определен критерий управления, то дальнейшей задачей является синтез закона регулирования, оптимизирующего этот критерий.
Синтез закона регулирования
В качестве критерия нефтедобычи автором используется величина [1]
G = q — k 1 ■ ( n + a- n 2 ) - к 2 ■ n , (1)
где q – оценка величины текущей производительности насоса (иногда эту величину называют текущим дебитом скважины);
M = k 1 ■ ( n + a ■ n 2 ) - расходы на электроэнергию в единицу времени;
D = к 2 ■ n - расходы на обслуживание глубинного оборудования и привода штангового насоса в пересчете на единицу времени.
Постоянные величины к 1 , к 2 , a можно получить на основе экспертных оценок. Они могут меняться в зависимости от цены на нефть (цены добычи нефти), цены на электроэнергию, цены и стоимости обслуживания глубинного оборудования и насосной установки.
Критерий (1) имеет одну точку максимума в рабочем диапазоне количества двойных ходов, характеристика его монотонна, поэтому можно записать квадратичный критерий
G 1 = — [ q — k 1 ■ ( n + a ■ n ) — к 2 ■ n ] , (2)
который имеет минимум в той же точке, что и максимум критерия (1).
В качестве пригодных для использования в станциях управления насосной установкой алгоритмов управления годятся только адаптивные алгоритмы, то есть такие, параметры которых в ходе управления меняются, так как меняются во времени и параметры скважины и самой насосной установки. К таким методам управления можно отнести метод синтеза функций Ляпунова, обеспечивающих устойчивость системы с коррекцией [2]; подход, при котором в ходе управления определяются параметры линеаризованной модели установки, и на каждом шаге алгоритмов синтезируется управление, исходя из оптимизации целевой функции (прогнозирующее управление [3], управление с идентификацией [4] и пр.) и подобные.
Для оценки значения количества двойных ходов в минуту используем прогнозирующее управление разомкнутого типа. В данном случае будущие прогнозирующие управления на всем горизонте прогноза зависят только от текущего состояния системы, т. е. не используется будущая обратная связь.
Зависимость производительности установки q от количества двойных ходов n , исходя из физических особенностей системы, можно описать линейным уравнением
q ( к + 1) = q ( к ) + A ( к ) ■ [ n ( к + 1) — n ( к )]. (3)
Прогнозирующие управления определяются по следующему правилу: на каждом шаге k минимизируем критерий со скользящим горизонтом управления
m
J ( k + m I k ) = - § [ q ( k + i ) - ( k 1 + k 2 ) • n ( k + i ) - k 1 - a- k ( k + i ) • n ( k + i )]2 , (4)
i = 1
полученный из (2), где m – горизонт прогноза, по последовательности программных управлений n ( k | k ), …, n ( k + p – 1| k ), зависящих только от состояния системы в момент k . В качестве управления в момент k берем n ( k ) = n ( k | k ). Тем самым получаем управление n ( k ) как функцию состояния q ( k ), т. е. управление с обратной связью. Чтобы получить управление n ( k + 1) в следующий момент, процедура повторяется для момента k + 1.
На управление (количество двойных ходов) накладывается ограничение nmin(k) ^ n(k) ^ nmax(k)• (5)
Выражаем последовательно все q ( k + i ) ( i = 1,2, …, m ) через q ( k ) с использованием (3) и подставим в (4). Имеем mi
J(k + m I k) = -§[q(k) + § A(k + j - 1) • [n(k + j) - n(k + j - 1)] - i=1 j=1
-
- ( k 1 + k 2) • n ( k + i ) - k 1 -a- n ( k + i ) • n ( k + i )]2 = § [ q ( k ) + § A ( k + j - 1) • [ n ( k + j ) - n ( k + j - 1)] -
- i=1 j=1
-(k1 + k2) • n(k + i) - k1 •a • n(k + i) • n(k + i)]2- [q(k) + § A(k + j -1) • [n(k + j) - n(k + j -1)] -j=1
-(k1 + k2) • n (k + m) - k1 •a • n (k + m) • n (k + m )]2.
Рассмотрим производную от (6):
d J ( k + m I k ) _ r ... m . .. r n .. . ...
——----— = -2 •[q(к) + § A(к + j - 1) •[n(к + j) - n(к + j -1)] - dn (k + m) j=1
- ( k 1 + k 2) • n ( k + m ) - k 1 •a^ n ( k + m ) • n ( k + m )] • [ A ( k + m - 1) - ( k 1 + k 2) - 2 • k 1 •a^ n ( k + m )] =
-
- 2 • [ q ( k ) + § 1 A ( k + j - 1) • [ n ( k + j ) - n ( k + j - 1)] - A ( k + m - 1) • n ( k + m - 1) + j = 1
+ ( A ( k + m - 1) - k 1 - k 2 ) • n ( k + m ) - k 1 • a • n ( k + m ) • n ( k + m )] x
x [ A ( k + m - 1) - ( k 1 + k 2) - 2 • k 1 • a • n ( k + m )].
-
(7) можно переписать в виде
6J(k + mIk) = -2 • [p + q • n(k + m) + R • n(k + m) • n(k + m)] • [5 + T • n(k + m)] = dn (k + m)
= -2•[P • 5 + (P • T + Q• 5) • n(k + m) + (T• Q + R • 5) • n(k + m) • n(k + m) +
+R • T • n(k + m) • n(k + m) • n(k + m)], где
P = q ( k ) + § A(k + j - 1) • [ n ( k + j ) - n ( k + j - 1)] - A ( k + m - 1) • n ( k + m - 1); j '= 1
Q = A ( k + m - 1) - k 1 - k 2;
R = - k1 • a;
5 = A ( k + m - 1) - k 1 - k 2;
T = - 2 • k 1 •a .
Общей задачей является минимизация (6) по значению управления n(k + m). Эта точка соответствует нулевому значению производной (8). Решая это уравнение, можно получить искомое значение управления n(k + m). Прямое определение управления по этой методике может привести к неустойчивому решению (у автора при просчете управление менялось по ограничениям), так как реальная система описывается сложным нелинейным уравнением, а уравнение типа (3) достаточно точно описывает ее только вблизи одной точки. Поэтому в данном случае целесообразно вести управление по закону n (k + m) = n (k + m -1) ±An, (10)
так как в этом случае мы на каждом шаге будем ограничивать шаг изменения искомого количества двойных ходов привода.
Задачу можно свести к выбору знака изменения количества ходов и его величине. При этом на каждом шаге управления согласно второго метода Ляпунова необходимо, чтобы dJ (k + m I k)
An ~-------—.(11)
d n ( k + m )
Отсюда из (8) следует
A n ~ P • S + ( P • T + Q • S) • n ( k + m ) + (T • Q + R • S ) • n ( k + m ) • n ( k + m ) +
+R • T • n(k + m) • n(k + m) • n(k + m).(12)
Если коэффициент а из (2) равен нулю, то в этом случае коэффициенты R и T из (12) равны нулю, и можно записать
An ~ P • S + Q • S • n (k + m),(13)
-
т. е. A n будет иметь тот же знак, что и величина ( P • S + Q • S • n ( k + m )).
Поскольку в момент вычисления A n величина n ( k + m ) у нас неизвестна, то в качестве нее можно принять величину количества двойных ходов в предыдущий момент времени, тогда получим
A n ~ P • S + Q • S • n ( k + m - 1). (14)
Аналогично для общего случая ( а ^ 0) можно записать
A n ~ P • S + ( P • T + Q • S) • n ( k + m - 1) + ( T • Q + R • S ) • n ( k + m - 1) • n ( k + m - 1) +
+ R • T • n ( k + m - 1) • n ( k + m - 1) • n ( k + m - 1). (15)
Можно сформулировать общий алгоритм управления для случая, например, горизонта прогноза, равного трем.
-
1. При текущем количестве ходов вычисляется производительность насоса и n (3) принимается равным ему, а q (3) – текущему значению производительности, задаемся значением начального приращения количества двойных ходов A нач, задаем значение текущего приращения количества двойных ходов A n = A нач .
-
2. Устанавливается количество ходов, равное текущему минус 2 • A нач. После окончания переходных процессов получаем значение текущей производительности и n (1) принимается равным текущему количеству двойных ходов, а q (1) – текущему значению производительности.
-
3. Устанавливается количество ходов, равное текущему плюс A нач. После окончания переходных процессов получаем значение текущей производительности и n (2) принимается равным текущему количеству двойных ходов, а q (2) – текущему значению производительности.
-
4. По трем точкам ( n (1), q (1)), ( n (2), q (2)), ( n (3), q (3)) вычисляем A (3) и принимаем A (1) = A (2) = A (3).
-
5. Смотрим в (14) (или (15)) знак изменения значения количества двойных ходов. Если знак поменялся относительно предыдущего хода, то принимаем A n = A n /2 (используем метод деления пополам). Если A n < A n min , то заканчиваем алгоритм, в противном случае меняем значение двойных ходов согласно (10), где знак изменения определяется (14) (или (15)). При вычислениях учитываем ограничения на количество двойных ходов согласно (5).
-
6. После окончания переходных процессов получаем значение текущей производительности. Производим сдвижку запомненных значений производительности, количества двойных ходов и коэффициентов n (1) = n (2), n (2) = n (3), q (1) = q (2), q (2) = q (3), A (1) = A (2), A (2) = A (3). n (3) принимается равным текущему количеству двойных ходов, а q (3) – текущему значению производительности. По трем точкам ( n (1), q (1)), ( n (2), q (2)), ( n (3), q (3)) вычисляем A (3).
-
7. Идем к п. 5.
При вычислении A (3) по трем точкам ( n (1), q (1)), ( n (2), q (2)), ( n (3), q (3)) можно использовать любой метод линейной аппроксимации, например, метод наименьших квадратов [5].
Для горизонта прогноза, равного двум, алгоритм будет иметь вид:
-
1. При текущем количестве ходов вычисляется производительность и n (2) принимается равным ему, а q (2) – текущему значению производительности, задаемся значением начального приращения количества двойных ходов А нач, задаем значение текущего приращения количества двойных ходов А n = А нач .
-
2. Устанавливается количество ходов, равное текущему минус А нач . После окончания переходных процессов получаем значение текущей производительности и n (1) принимается равным текущему количеству двойных ходов, а q (1) – текущему значению производительности.
-
3. По двум точкам ( n (1), q (1)), ( n (2), q (2)) вычисляем A (2) = ( q (2) – q (1))/( n (2) – n (1)) и принимаем A (1) = A (2).
-
4. Смотрим в (14) (или (15)) знак изменения значения количества двойных ходов. Если знак поменялся относительно предыдущего хода, то принимаем А n = А n /2 (используем метод деления пополам). Если А n < А n min , то заканчиваем алгоритм, в противном случае меняем значение двойных ходов согласно (10), где знак изменения определяется (14) (или (15)). При вычислениях учитываем ограничения на количество двойных ходов согласно (5).
-
5. После окончания переходных процессов получаем значение текущей производительности. Производим сдвижку запомненных значений производительности, количества двойных ходов и коэффициентов n (1) = n (2), q (1) = q (2), A (1) = A (2). n (2) принимается равным текущему количеству двойных ходов, а q (2) – текущему значению производительности. По двум точкам ( n (1), q (1)), ( n (2), q (2)) вычисляем A (2).
-
6. Идем к п. 4.
Результаты моделирования при ограничениях количества двойных ходов n min = 1 и n max = 6,5, начальным значением шага А n = 1 и точностью алгоритма до 0,06 хода в минуту для горизонта прогноза, равного трем и двум соответственно (рис. 1 и 2). Значения коэффициентов из (2) показаны там же.
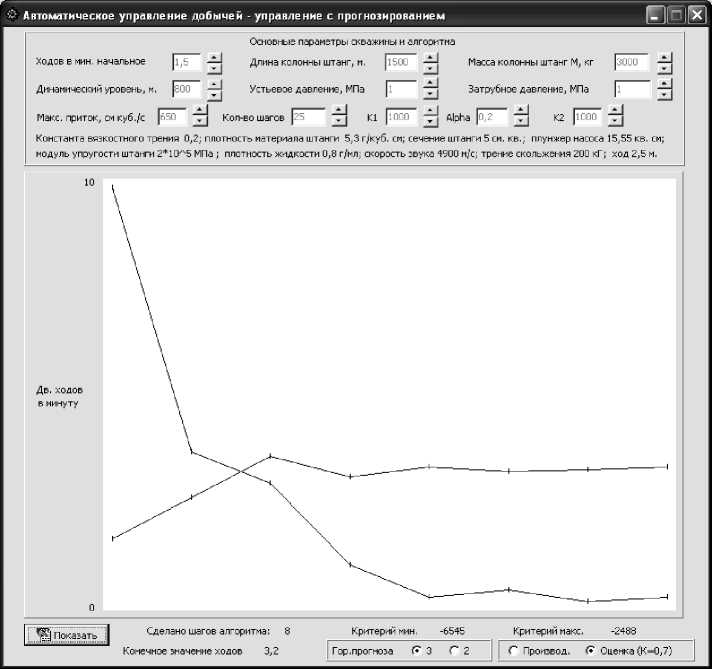
Рис. 1. Изменение критерия вида (2) и количества двойных ходов. Горизонт прогноза равен трем
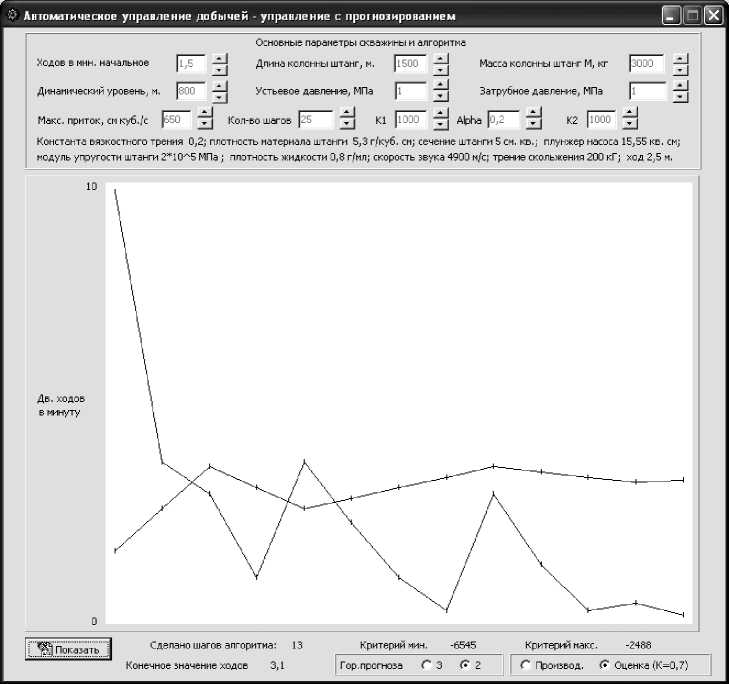
Рис. 2. Изменение критерия вида (2) и количества двойных ходов. Горизонт прогноза равен двум
Из рис. 1 и 2 четко видны прогнозирующие свойства алгоритмов (критерий двигается в одном направлении, а значение управляющей величины – количества двойных ходов – меняет направление движения). При вычислениях производительности насоса в программе бралась его оценка, полученная из обработки данных динамограмм, а само моделирование производилось по методу, аналогичному приведенному в [6].
Можно вести управление, определяя необходимое количество двойных шагов путем прямой максимизации критерия (1). При этом шаг изменения количества двойных ходов будет переменным. Алгоритм будет выглядеть следующим образом:
-
1. При текущем количестве двойных ходов вычисляется значение производительности q c . Знак изменения количества двойных ходов Sign принимается равным 1. Задаемся начальным значением изменения числа двойных ходов A n .
-
2. Устанавливается количество ходов, равное n = n + Sign • A n .
-
3. При текущем количестве двойных ходов вычисляется значение производительности q н.
-
4. Если q н > q c , то принимаем q c = q н и идем к п. 2.
-
5. Если q н < q c , то принимаем q c = q н , меняем шаг изменения количества двойных ходов A n = A n / 2 , принимаем Sign = -Sign.
-
6. Если A n < A n min , то заканчиваем алгоритм, в противном случае идем к п. 2.
Этот алгоритм реализует метод оптимизации путем деления интервала пополам [7].
Результаты моделирования процесса управления приведены на рис. 3.
В целях корректного сравнения данных при моделировании использовались те же данные, что и для прогнозирующего управления.
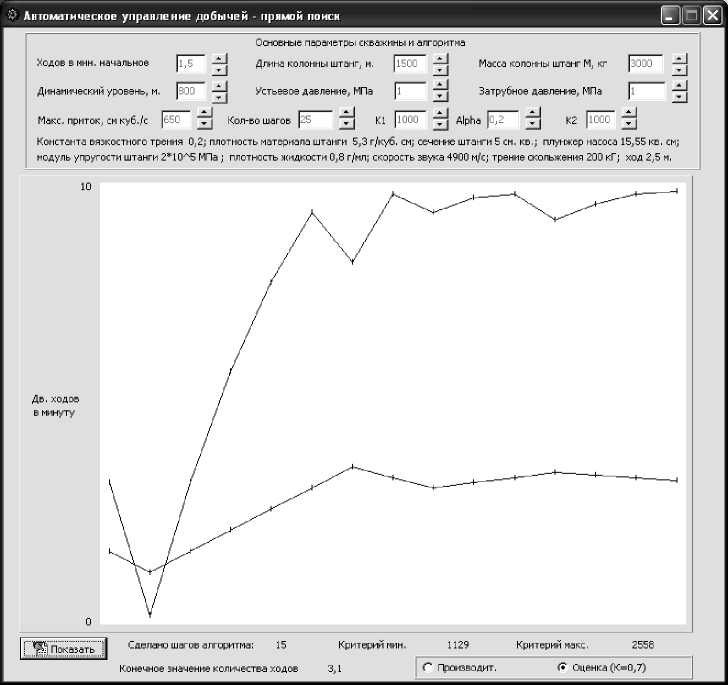
Рис. 3. Изменение критерия вида (1) и количества двойных ходов при прямом поиске
Выводы
В качестве пригодных для реализации законов регулирования приводов глубинного штангового насоса в автоматическом режиме можно использовать адаптивные методы регулирования. Путем цифрового моделирования показана эффективность применения для данной цели прогнозирующего управления, где в качестве модели зависимости производительности установки от количества двойных ходов используется линейная модель, а изменение количества двойных ходов происходит с переменным во времени шагом.
Список литературы Синтез закона регулирования привода глубинного штангового насоса в автоматическом режиме
- Садов, В.Б. Автоматическое управление приводом глубинного штангового насоса./В.Б. Садов//Актуальные проблемы автоматизации и управления: тр. науч.-практ. конф. -Челябинск: Издат. центр ЮУрГУ, 2013. -С. 66-69.
- Ким, Д.П. Теория автоматического управления. В 2 т. Т. 2: Многомерные, нелинейные, оптимальные и адаптивные системы: учеб. пособие/Д.П. Ким. -М: Физматлит, 2004. -464 с.
- Clarke, D.W. Generalized Predictive Control. Part I. The Basic Algorithm/D.W. Clarke, C. Mohtadi, P.S. Tuffs//Automatica. -1987. -Vol. 23, no. 2. -P. 137-148.
- Бунич, А.Л. Минимаксная прогнозирующая модель в системе управления с идентификатором//А.Л. Бунич/Автоматика и телемеханика. -2006. -№ 7. -С. 120-132.
- Планирование эксперимента в исследовании технологических процессов/К. Хартман, Э. Лецкий, В. Шефер и др. -М.: Мир, 1977. -544 с.
- Садов, В.Б. Моделирование динамограмм при добыче нефти глубинными штанговыми насосами/В.Б. Садов//Информационно-измерительные и управляющие системы и устройства: сб. тр. приборостроит. фак. -Челябинск: Издат центр ЮУрГУ, 2011. -С. 172-177.
- Самарский, А.А. Введение в численные методы./А.А. Самарский. -М.: Наука, 1982. -269 с.
