Система адаптации колесных тракторов высокой мощности к зональны м технологиям почвообработки

Автор: Селиванов Н.И., Кузнецов А.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 6, 2014 года.
Бесплатный доступ
Обоснована структурная схема, разработаны модели и алгоритм системной адаптации колесных тракторов высокой мощности к природно-производственным условиям агротехнической зоны эксплуатации.
Структурная схема, природно-производственные условия, адаптация, операции обработки почвы, параметры-адаптеры, критерии, ограничения
Короткий адрес: https://sciup.org/14083757
IDR: 14083757 | УДК: 629.114.2
The system of the high power wheel tractor adaptation to the zonal soil-processing technologies
The structure chart is substantiated,the system models and algorithm of the high power wheel tractor adaptation to the natural-production conditions of the agrotechnical operation zone are developed.
Текст научной статьи Система адаптации колесных тракторов высокой мощности к зональны м технологиям почвообработки
Введение. В общей структурной схеме многоуровневой системы адаптации мобильных энергетических средств к природно-производственным условиям обоснование энергетического потенциала (f- • М еэ ) * и эксплуатационной массы m э * тракторов для установленных групп родственных операций почвообработки с учетом современных тенденций их развития является главной задачей второго уровня [1].
Методология адаптации трактора к условиям режима рабочего хода предусматривает обоснование структурной схемы, разработку математических моделей и алгоритма оптимизации массоэнергетических параметров для совокупности технологий основной обработки почв.
Определение оптимальных параметров (адаптеров) трактора производится на режимах рабочего хода разных групп родственных операций основной обработки почвы при обоснованных значениях номинальной скорости VHi и характеристиках удельного тягового сопротивления ( К Q i , Д К Qi , vK0i ) рабочих машин-орудий.
Цель работы . Обоснование структуры и моделей системной адаптации колесного 4К4б трактора с установленной характеристикой двигателя к природно-производственным условиям.
Достижение поставленной цели предусматривает решение следующих задач :
-
1) обосновать структурную схему системы адаптации эксплуатационных параметров и режимов рабочего хода трактора к зональным технологиям обработки почвы;
-
2) разработать модели и алгоритм оптимизации массоэнергетических параметров трактора для операционных технологий основной обработки почвы.
Условия и методы исследования. Эксплуатационные параметры трактора ^ еэ и mэ определяются тяговым и скоростным режимами в процессе рабочего хода и рассматриваются как результативные признаки функционирования при случайном характере тяговой нагрузки с учётом установленных допущений и ограничений:
-
а) по энергоёмкости и техническому обеспечению операции основной обработки почвы разделены на три группы, каждую из которых характеризуют удельное тяговое сопротивление К Q i при скорости V о =1,4 м/с, его приращение от скорости Д К i , коэффициент вариации vK0i и рациональный по энергозатратам и агротребованиям интервал рабочей скорости^ ± ДV^ ;
-
б) рациональный тяговый диапазон трактора, ограниченный режимами максимального тягового КПД Л т тах ( р кр opt ) и допустимого буксования З д ( р кр тах ), характеризуется номинальным коэффициентом использования сцепного веса: р кр opt < (ркрн < ркр при у = 0,5 (р кр opt + (ркр тах );
кр
-
в) КПД трансмиссии г/ тр и коэффициент сопротивления качению / = f0 + С(VH - V0) в заданных условиях равны средним расчетным значениям без учета мощности двигателя и угла наклона поверхности поля ( α =0).
В основу адаптации современного колесного трактора с установленной характеристикой двигателя ( ^ еэ , К м , пн ) к режиму рабочего хода отдельных групп родственных операций обработки почвы положено изменение эксплуатационной массы для достижения оптимальных значений показателей технологичности – удельного энергетического потенциала ( f— • Э ) * и удельной материалоемкости (т уд = 10 3 /( f— • Э ) * ) , обеспечивающих наиболее эффективное его функционирование в составе почвообрабатывающих агрегатов разного технологического назначения.
Оптимальные значения эксплуатационных параметров трактора определяются из условия обеспечения чистой производительности W j* , установленной по экономическим критериям оптимальности [2] для каждой технологической операции почвообработки и определенной длины гона l Гi , при функционировании в интервале допустимых значений рабочей скорости V H; ± ДV^ и тяговом диапазоне, соответствующем р кр opt < р крн < Р кр .
Результаты исследования и их анализ. Для повышения эффективности адаптации колёсных 4К4б тракторов с переменными массоэнергетическими параметрами к природно-производственным условиям разработана многоэтапная структурная схема (рис. 1) с обоснованными моделями, критериями оптимальности и ограничениями.
Входными факторами системы на первом этапе адаптации являются рабочая скорость VHi , длина гона l г , характеристики удельного сопротивления рабочей машины ( К 3 i, Д К 0i, vK0i ) и двигателя ( ^ еэ , К м , пн ) . Оптимизации подлежит номинальный коэффициент использования сцепного веса р крн, характеризующий устойчивое движение трактора по тягово-сцепным свойствам в номинальном тяговом режиме при ограничении δ opt ≤ δ Н <δ д для обобщенной характеристики опорной поверхности.
Критерий оптимальности представляет максимум тягового КПД г т тах , определяющий условие функционирования трактора в режиме рабочего хода с наивысшей производительностью и наименьшими энергетическими затратами на конкретном почвенном фоне. Оценки составляющих тягового КПД трактора по результатам стендовых и тяговых испытаний или установленных зависимостей формируют перечень и содержание промежуточных задач на данном этапе.
Режим работы трактора по условиям сцепления считается оптимальным, если целевая функция Г т = f( p кр ) * тах , поэтому математические модели М 1.1 и М 1.2 представляют одно- и двухмерное уравнения (табл.).
Модели и алгоритм оптимизации массоэнергетических параметров колесного 4К4б трактора
|
Этап |
Критерии оптимизации |
Параметры и модели оптимизации |
Ограничения |
|
1 |
2 |
3 |
4 |
|
1 |
Г т = Г тр ТгГ в ^ тах Г тр = Г хх • Г ц1 • Г к2 • ГШ3 Г / = Р кр /(р кр + f) Гн = 1 - а ^ р кр /( в - Р кр ) |
М 1.1. р крн = в -6 Н /(а + 6 Н ) М 1.2. Г т = Г тр [ (^к р + /) ] [1 Г а^Ф кр ]) 1 ( в -ф кр w |
3 opt < 6 Н <0,15 р кр opt < р крн < 0 ,5 (р кр opt + р кр тах ) |
|
2 |
3,6 •Gt 10 3 де =-------- * --* min, Na ■ ^ N г/(кВт∙ч) |
М 2.Ц- = 0,458 •К м -v М с - м 0,233 М2.2.?- = -0,964 + 1,80 • N К м - 0,402^ + °^ |
( м < К м /(1 + 3v МС ) 1,15< К м <1,50 ^:х< 117 |
Окончание табл.
|
1 |
2 |
3 |
4 |
|
3 |
{— •Nes N еэ W =--> max, м2/с K0-EK ' E k = М к /д т Е П = Ек - Ко ^ min , кДж/м2 |
М 3.1. Э * = 9др р1 Н , Вт/кг V N М 3.2. m Уд = д т • ( N /g-v кр ■ У Н ■ 10 -3 , кг/кВт |
Э min — Э — Э max m уд min — m уд — m уд max |
|
4 |
^ К КЕп = —K ^ min , с/м ЕП V т -V ’ |
М 4.1. m * = N^ / Э*, т М 4.2.К* э = Э* - m э max , кВт М4.3. W max = ( N -К - /К о -Е к , м2/с |
m э min — m э — m э max К еэ — К еэ W max > W * |
|
5 |
К т э = V/д т■ ( N ■ Э ^ min ,с2/м |
М 5 1 у = G o a + ^ Б 1 ( а 71 +L) — & Б 2 a k кН М 5 2 У = G30 ( L-a U ) + & Б К ( L+a k ) - & Б 1 •a n кН L |
У пст = 0,55(0,65)m * - g m 6 1 — m б 1max Ук .ст = 0,45(0,35)m - - g m б 2 — m 6 2max |
|
6 |
г — к1 Г у тр (К а +К т°) . п . С э = П L Тг + 3 П + С тр ’ к -Т ( и т + g • Ц м )] ^ min , р/га П = 0,36 - t -W ^ max , га/ч |
^ N ■ N e3-V тр (1-3 Н ) М 6.1. m - = * , т э v ^ -gyp крН +D ’ МАО I* m 3 'g(a-f+3 н (b+fy) М b.2.iK = . , М 1 к t N ■ И - тр ( О н + о ) (f — -N e3 ) -д тн М 6.3. V - = — -------, м/с " g-pK p H-m3 |
mamin — ms — msrnax V o pt< V Z — v max |
На втором этапе решением моделей М 2.1 и М 2.2 определяются оптимальные значения коэффициентов нагрузки %—= М К / М Н и использования мощности %—= N e / Nеэ двигателя при обосновании совместных с механической трансмиссией режимов его работы в условиях вероятностной нагрузки. Критерий оптимальности gemin определяется из условия dge/dMk = 0 . При известных Км и vMC * vK0 экстремальные значения %— и %— учитывают установленные ограничения.
мN
Третий этап связан с оптимизацией показателей технологичности трактора для выполнения определенной группы родственных операций. Математические модели М 3.1 и М 3.2 представляют общие для всех типов энергомашин уравнения взаимосвязи указанных показателей с основными параметрами-адаптерами, установленными на предыдущих этапах первого и второго уровней общей системы оптимизации.
Максимум чистой производительности Wmax и минимум удельных энергозатрат Enmin используются в качестве компромиссных критериев оптимальности. Ограничениями являются пределы регулирования показателей технологичности.
На четвертом этапе решением моделей 4.1–4.3 определяются оптимальные массоэнергетические параметры трактора с установленными показателями технологичности (%—Э) - и m^ для выполнения конкретной группы родственных операций с номинальной рабочей скоростью на длине гона l гi.. Основным критерием оптимальности является минимум эквиваленты энергозатрат на единицу производительности
К ЕП =К Е Р кр 1- -3 = [ 1+AK ( V 2 -V )] / n . V^^ ^ / n^min , (1)
где KE=Ek/( ^еэ ) = ^/({ N Кэд2^ - показатель удельных энергозатрат на единицу производительно-
сти.
Оптимальное значение эксплуатационной массы должно соответствовать условию m3min < m*t < тэтах . Однако для современных высокомощных колёсных тракторов это условие на операциях первой группы (отвальная вспашка и глубокое рыхление) не выполняется, поскольку m * t > тэтах . Поэтому на родственных операциях с пониженной скоростью VHi двигатель необходимо переводить на частичную нагрузочную характеристику (регулирование цикловой подачи топлива) для получения мощности
* *
Nesi Эi 'm3max
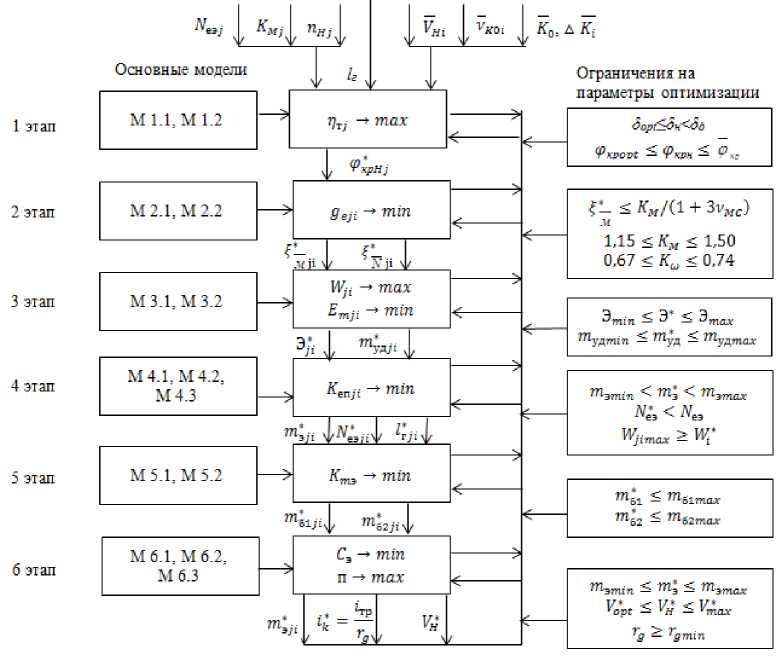
Рис. 1. Структурная схема адаптации эксплуатационных параметров колесного 4К4б трактора к зональным технологиям почвообработки
Оптимальная длина гона для указанной операционной технологии почвообработки определяются при этом из условия
W i^ N i КэГПтн / K oi Vk£W i .
Пятый этап предполагает обоснование оптимальных значений массы переднего т^ и заднего m ^ 2i балластов для данной группы родственных операций. Реакция почвы на передние У п.ст и задние Ук . ст колеса неподвижного трактора, свободного от тяговой нагрузки (Ркр = 0) , в этом случае характеризуется статическими значениями
( У п.ст тэ 9 ац /^
1 Ук.ст=тэ •9(^~ац)/^> где ац - расстояние от центра масс до оси задних колес; L - продольная база трактора.
Нагруженность колес оценивают по коэффициентам нагрузки передних А п = Уп . ст/(тэ * • д') и задних Л к = У к. ст/(т э • д) колес, отношение которых для тракторов 4К4б, агрегатируемых с прицепными машинами, должно составлять Лп/Лк = 0,55/0,45 , а с навесными орудиями - 0,65/0,35 [3]. Под действием тяговой нагрузки при Ркрн = ф крн •т Э • д реакции по осям выравниваются, что соответствует наилучшему использованию сцепного веса трактора.
Для трактора с минимальным эксплуатационным весом G30 = т эо • ^крн • д и установленными значениями L и а ц оптимальные значения массы переднего и заднего балластов определяются решением моделей 5.1 и 5.2, представляющих уравнения моментов относительно осей передних (О 1 ) и задних (О 2 ) колес (рис. 2)
У,
п.ст
к.ст
_ С Б1 (Ь+а д )+С30'а ц -С Б2 'а ^ _
L
;
_ G ao CL—а ц )+£ Б2 (L+a t )-G B 1'a n
L
,
где а п и ак - продольные ординаты центра масс переднего и заднего балласта. Учитывая, что m*3i _ тоэ + т Б1 + т Б2 , решение уравнений (5) дает
(
m * тттЭоэН+^и) . тБ1=—(+П+^Г ’
™* _ m-m oaH L-a u +a n ) m™ (L+a n +a k) ’
а соотношение A*Bi _ т^и/m Б 2i выразится как
С _ а ц +а к
Б (L+a n -а ц)'
Критерий оптимальности на этом этапе представляет эквивалента эксплуатационной массы Ктэ при установленных ограничениях массы балластных грузов.
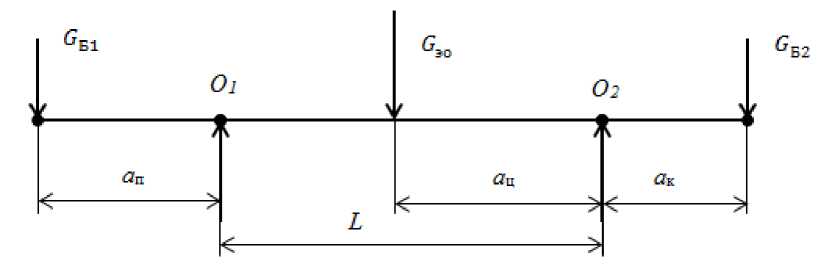
Рис. 2. Расчетная схема определения эксплуатационной массы трактора 4К4б при балластировании
На заключительном шестом этапе решением моделей 6.1–6.3 (см. табл.) определяются наиболее рациональные массоэнергетические параметры и передаточные числа iTp/rg трансмиссии трактора для обобщенных условий отдельных или нескольких групп родственных технологических операций с учетом приведенных ограничений по эксплуатационной массе и номинальной скорости рабочего хода. Удельные эксплуатационные затраты С Э и техническая производительность П представляют критерии оптимальности.
Технический уровень и эффективность трактора оцениваются на заключительном этапе адаптации с использованием комплексного критерия [4]
K э =K п ∙K N ∙K m ∙K E ,
представляющего произведение частных критериев эффективности: Кп - по производительности; KN - по часовому расходу топлива (эквивалента N e ); Кт - по эксплуатационной массе; КЕ - по расходу топлива на единицу площади (эквивалента Епр = Еп /W ), которые рассчитываются по формулам:
' кп= 1 - (|^ - W^/W*;
< ^V = 1 - (^еэ - (^^ *)/(^еэ)*
|^ = 1 " (тэ - п^/т^
!Л= i-^-^i)/^-
В уравнении (9) показатели без (*) берут для конкретного трактора 4К4б, а со знаком (*) для базового варианта при E n pmin .
Выводы
-
1. Предложена структурная схема системной адаптации колесных 4К4б тракторов к совокупности используемых технологических операций основной обработки почвы, позволяющая определить (с учетом возможностей балластирования и регулирования мощности двигателя) число их типоразмеров для превалирующего класса длины гона в агротехнической зоне эксплуатации.
-
2. Разработанные на основе детерминированно - стохастических связей с использованием обоснованных параметров – адаптеров, критериев эффективности и ограничений – математические модели и алгоритм расчета максимально учитывают и с достаточно высокой точностью отражают влияние природно производственных факторов на режим рабочего хода и эксплуатационные параметры колесного трактора высокой мощности.
-
3. Комплексный критерий эффективности может служить базовым для оценки технологического уровня высокомощных тракторов с учетом адаптации к условиям эксплуатации.
