Система автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании

Автор: Самойленко Александр Михайлович
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 3, 2014 года.
Бесплатный доступ
В статье представлены структура и алгоритмы системы автоматического контроля натяжением подъемных и тяговых канатов драглайна при копании. Система обеспечивает управление процессом копания с толщиной срезаемой ковшом стружки, близкой к постоянной величине. Для этого автоматическое регулирование натяжения подъемных и тяговых канатов осуществляется по нелинейной зависимости от текущего значения проходимого ковшом пути копания. Применение системы обеспечивает повышение производительности драглайна по сравнению с ручным управлением.
Драглайн, копание, автоматический контроль, регулирование, натяжение канатов, толщина стружки грунта, путь копания
Короткий адрес: https://sciup.org/140230062
IDR: 140230062 | УДК: 65.011.56:621.879.38
Текст научной статьи Система автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании
Эффективность использования экскаваторов-драглайнов, являющихся высокопроизводительными и дорогостоящими горными машинами, существенно зависит от того, насколько управление его главными приводами соответствует такому режиму работы, при котором достигается расчетная производительность экскаватора для конкретных горногеологических условий забоя при допустимых нагрузках в его рабочем оборудовании и электромеханических системах (т.е. электроприводах и механизмах).
Так как слабина в подъемных канатах и значительные динамические нагрузки в электромеханических системах драглайна возникают при ручном управлении процессом черпания, то устранение слабины и ограничение динамических нагрузок может быть обеспечено с помощью систем автоматического контроля натяжения подъемных и тяговых канатов экскаватора-драглайна при копании.
В данной системе реализованы три режима управления процессом черпания (автоматического, автоматической коррекции сигналов управления электроприводами и автоматической защиты электромеханических систем от перегрузок) с помощью отдельных замкнутых контуров регулирования натяжения подъемных и тяговых канатов, в которых регулирование натяжения канатов осуществляется по нелинейным зависимостям от текущей длины пути копания и величины усилия в подъемных и тяговых канатах.
Достижение указанной цели, а именно, наличия автоматического контроля натяжения подъемных и тяговых канатов драглайна, осуществляется в режиме автоматического управления процессом черпания, путем изменения натяжения подъемных канатов по нелинейной зависимости от величины длины пути копания 5П = f (l^ ).
Впоследствии заданную величину натяжения подъемных канатов целесообразно автоматически корректировать, если усилие в подъемных канатах недостаточно и происходит значительное увеличение усилия в тяговых канатах из-за чрезмерного заглубления ковша в породу. Этот вопрос решается за счет внедрения в систему режима автоматической коррекции сигналов управления электромеханическими системами подъема и тяги.
И наконец, величину усилия натяжения подъемных канатов необходимо изменять в зависимости от усилия в тяговых канатах Sn = f ( st ) для того, чтобы обеспечить обход ковшом труднопреодолимого препятствия. Устранение перегрузок (нагрузок, близких стопорным) необходимо обеспечивать с максимально допустимым быстродействием, определяемым, в основном, коммутационными ограничениями электрических машин – при допустимой величине перерегулирования и колебательности переходного процесса регулирования натяжения канатов. Указанные требования по устранению вышеуказанных перегрузок предлагается реализовать в режиме автоматической защиты электромеханических систем драглайна от перегрузок.
Структура системы автоматического контроля натяжения подъемных и тяговых канатов экскаватора-драглайна при копании представлена на рис. 1.
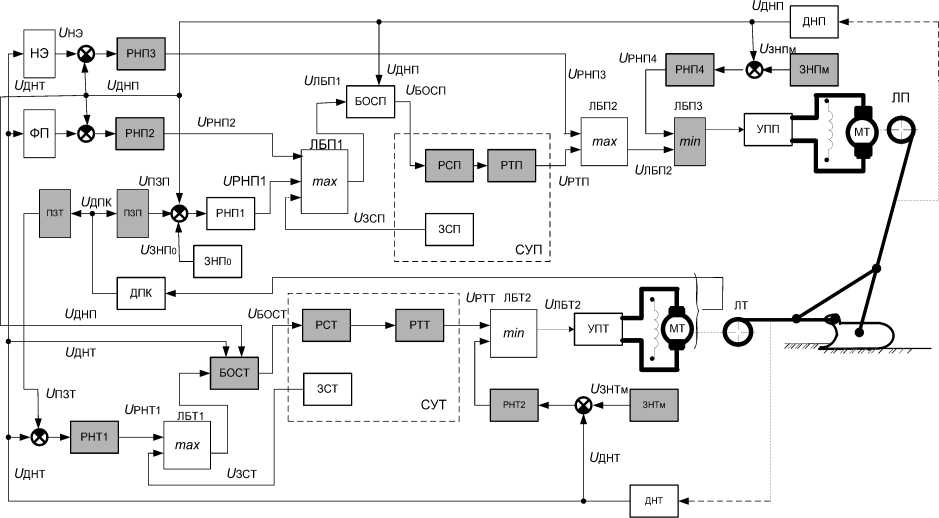
Рис. 1. Структура системы автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании
Структура системы содержит 4 замкнутых контура регулирования натяжения подъемных канатов и 2 замкнутых контура регулирования натяжения тяговых канатов. Каждый контур регулирования имеет свой собственный регулятор, что предопределяет свободный выбор законов управления, реализуемых регуляторами, их параметров, и обеспечивает их независимую настройку в соответствии с требованиями, предъявляемых к качеству процесса регулирования в каждом контуре. Взаимодействие между соответствующими регуляторами натяжения подъемных и тяговых канатов (РНП1,2,3,4 и РНТ1,2) и функциональными элементами СУП и СУТ (ЗСП, РТП и ЗСТ, РТТ) осуществляется через соответствующие логические блоки выделения сигналов, алгоритмы управления которых определяются усилиями в подъемных и тяговых канатах с их заданными максимальными или минимальными значениями.
Регуляторы РНП1, РНП2, РНТ1, обеспечивающие работу системы в режимах автокопания и автокоррекции сигналов, подключаются на входы соответствующих систем управления электроприводами подъема и тяги, а регуляторы натяжения канатов РНП3, РНП4 и РНТ2, обеспечивающие режим защиты электроприводов от перегрузок, с целью повышения быстродействия при регулировании усилия в канатах в этом режиме подключаются непосредственно на входы управляемых преобразователей электроприводов подъема и тяги УПП и УПТ.
Кроме трех режимов работы системы автоматического контроля натяжения подъемных и тяговых кантов, ее структура предусматривает также режим ручного управления процессом черпания. Однако, если сигналы управления электроприводами подъема и тяги, сформированные машинистом экскаватора, будут приводить к изменению натяжения подъемных или тяговых канатов нежелательным образом, т.е. к возможности возникновения значительных динамических нагрузок в электромеханических системах, то эти сигналы будут отключены, и не будут влиять на величину натяжения канатов.
В разработанной структуре системы содержится:
-
- блок (БОСП) ограничения сигнала заданной скорости электропривода подъема в зависимости от усилия в подъемных канатах [26], с целью ограничения динамических нагрузок, возникающих в момент отрыва груженого ковша от поверхности забоя при наличии слабины в подъемных канатах;
-
- блок (БОСТ) ограничения сигнала заданной скорости электропривода тяги в зависимости от усилия в подъемных и тяговых канатах, с целью ограничения динамических нагрузок электропривода тяги, которые могут возникнуть при черпании с большой скоростью в тех случаях, когда усилия в тяговых канатах близки к стопорным из-за значительного заглубления ковша в породу, при слабине в подъемных канатах, а также при встрече ковша с труднопреодолимым препятствием.
Алгоритмы управления системы автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании приведены в табл. 1. Разработанные алгоритмы управления системы обеспечивают требуемые подключения управляющих воздействий на электроприводы подъема и тяги с помощью логического выделения сигналов управления при сравнении усилий в подъемных и тяговых канатах с их заданными минимальными и максимальными значениями.
Таблица 1.
Алгоритмы управления системы автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании
|
Блок |
Алгоритм |
||
|
Логический блок ЛБП1 |
U ЛБП1 max( U РНП1 , U РНП2 , U ЗСП ) |
||
|
Логический блок ЛБП2 |
U РНП3, при S Т S РНП3 Т ТЗ U max U U М U ЛБП2 max U РНП3 , U РТП U РТП, при S S ТЗ |
||
|
Логический блок ЛБП3 |
ТТ V V • тт — i г ЛБП2 , П ПЗ ; U М ЛБП3 mn ЛБП2 , РНП4 РНП4 , П ПЗ М , |
||
|
Логический блок ЛБТ1 |
U ЛБТ1 max U ЗСП , U РНТ1 |
||
|
Логический блок ЛБТ2 |
U , при S S РТТ Т ТЗ U М ЛБТ2 mn РТТ , РНТ2 U РНТ2, при S Т S ТЗ |
||
|
Логический блок БОСП |
U БОСП U З РСП |
V П , S П S П ; V П , S П S П , |
|
|
Блок ограничения скорости БОСТ |
U ( S ) БОСТ П U БОСТ ( S Т ) — ^ |
V Т , S П S Т 0 П П 0 0,..., V , S S ТНОМ П П0 ,..., V ТНОМ, Т S Т СТ. ; 0.5 V , S 0; ТНОМ Т 0, S S |
|
Применение разработанной системы программного регулирования натяжения подъемных и тяговых канатов позволяет повысить производительность драглайна по сравнению с ручным управлением за счет уменьшения времени копания и времени на планировку забоя, а также повысить надежность и долговечность рабочего оборудования и электромеханических систем подъема и тяги драглайна.
Список литературы Система автоматического контроля натяжения подъемных и тяговых канатов драглайна при копании
- Ломакин М.С. Автоматическое управление технологическими процессами.
- Ломакин М.С., Ромашенков А.М., Самойленко А.М. Устройство для управления движением ковша экскаватора-драглайна. Патент РФ, № 2326212, 2006.
