Система автоматического регулирования давления котла ДКВР-4/13 ГМ с помощью пропорционально-интегрального регулятора

Автор: Ахметов Р.Р., Кручинин И.А., Аксенова Е.А.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 6 (46), 2020 года.
Бесплатный доступ
В данной статье рассмотрена САР давления пара путем изменения подачи топлива в котёл ДКВР-4/13 ГМ. Для построения математической модели объекта управления были сняты разгонные кривые по которым получены выражения для передаточной функции объекта регулирования.
Синтез системы, линейная одноконтурная система, передаточная функция
Короткий адрес: https://sciup.org/140287999
IDR: 140287999 | УДК: 621.18-182.2
Automatic pressure control system boiler DKVR-4/13 GM using a proportional-integral controller
This article discusses the SAR of steam pressure by changing the fuel supply to the boiler DKVR-4/13 GM. To build a mathematical model of the control object, the acceleration curves were removed and expressions for the transfer function of the control object were obtained.
Текст научной статьи Система автоматического регулирования давления котла ДКВР-4/13 ГМ с помощью пропорционально-интегрального регулятора
В данной статье рассмотрена САР давления пара путем изменения подачи топлива в котёл ДКВР-4/13 ГМ. Для построения математической модели объекта управления были сняты разгонные кривые по которым получены выражения для передаточной функции объекта регулирования.
Синтез системы, линейная одноконтурная система, передаточная функция.
R. R. Akhmetov, I. A. Kruchinin, E. A. Aksenova
Student of the Department " automation and management, student of the Department "automation and management, senior teacher of the Department "automation and management"
Penza state technological University
Russia, Penza
AUTOMATIC PRESSURE CONTROL SYSTEM
BOILER DKVR-4/13 GM USING A PROPORTIONAL-INTEGRAL
CONTROLLER
This article discusses the SAR of steam pressure by changing the fuel supply to the boiler DKVR-4/13 GM. To build a mathematical model of the control object, the acceleration curves were removed and expressions for the transfer function of the control object were obtained.
System synthesis, linear single-circuit system, transfer function.
Синтез системы управления производился при помощи автоматизированной системы имитационного моделирования MATLAB
Рассматривается линейная одноконтурная замкнутая система регулирования третьего порядка. По кривым разгона (рисунок 1,2).
Ft (%)
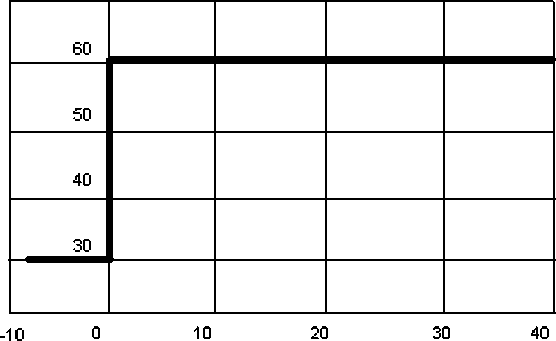
Время (сек.)
Рис. 1. График расхода топлива (степень открытия клапана топливоподачи)
Рп (кгс/см2)
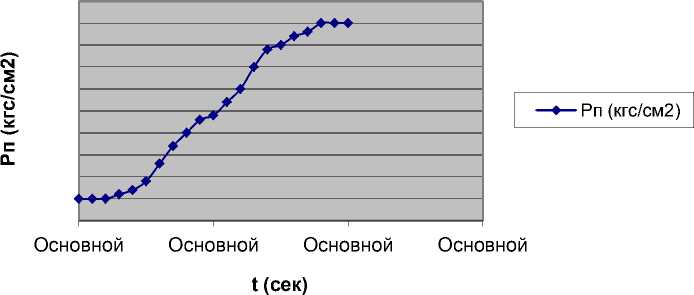
Рис. 2. Разгонная характеристика по каналу расход топлива - давление пара на выходе котла
В ходе эксперимента была получена передаточная функция для рассматриваемого объекта по каналам: расход топлива - давление пара на выходе котла (формула 1)
W ( Р ) =
k 1 Р - Р Т 1
(1 + T i p )(1 + T 2 p )
Параметры объекта для данной модели равны:
-
- коэффициент передачи К 1 =0,007 кгс/см2/%
-
- постоянная времени Т1=10,240 сек.
-
- постоянная времени Т2=1,846 сек.
-
- запаздывание т 1 =6,396 сек.
Передаточные функции звеньев САУ:
Передаточная функция измерительного преобразователя (датчика) давления пара, В качестве датчика использован манометр ЭКМ-160М с пределами измерения от 0 до 16 кгс/см2, выходной сигнал: 0-5 мА,
W д (р) = К д = (16-0)/(5-0) = 3,2 кгс/см2/мА
Для исполнительного механизма и регулирующего органа объединим передаточные функции Wим (р) и W p о(р) в одну передаточную функцию W им+ро :
Регулятор совместно с ИУ реализует ПИ-закон регулирования, поэтому
Киу=1; W им+ро (р)=К иу =1 град,угла/%
Для синтеза системы выбираем ПИ-регулятор.
ПИ-закон регулирования позволяет увеличить точность регулирования, уменьшить время отработки задающего воздействия, свести статическую ошибку к нулю,
W p ( Р ) = k p +
Tиp
k p T u Р + 1
Tиp
где Kp и Ти - коэффициенты настройки регулятора.
Передаточная функция разомкнутой системы будет равна произведению передаточных функций отдельных звеньев
w ( p) = w . ( pW ( p w , ( p w ( p ) = _ KTp + Р" (3)
Т е Р (T 1 p + 1)( T 2 p + 0
где к = какёдк i , T = k p i , ,
Передаточная функция замкнутой системы
W ( p ) = W ( p ) =__________ K ( T 4 p + 1) e p T 1 __________
-
7 1 + W ( p ) T ^ p(T i p + 1)( T 2 p + 1) + K(T 4 p + 1) e p T 1
В соответствии с критерием устойчивости Михайлова условия устойчивости запишутся в виде системы двух уравнений к [cos(®T) + mT sin( o>t )]=T (T + T2)®2;
K [ to T4 cos( toTx ) - sin( toTx ) ] = T ( TT « 2 -1) ®.
После внесения численных значений передаточных функций в систему, получаем область устойчивости построенную в плоскости параметров ПИ - регулятора Kp и Ти , которая определяется путем решения системы (5).
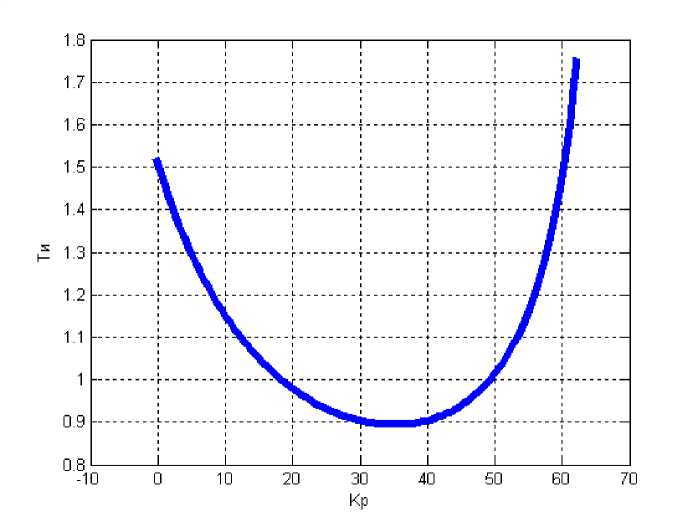
Рис. 1. разбиение в плоскости параметров ПИ –регулятора
Расчёт и анализ системы управления
Структурная схема системы показана на рис. 2.
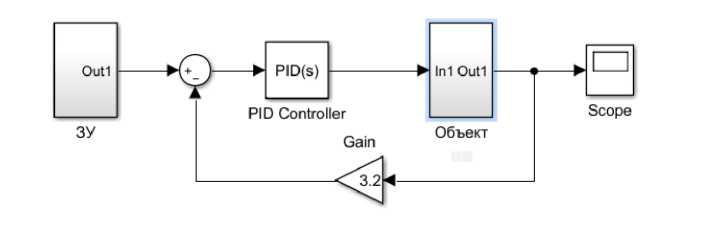
Рис. 2. Структурная схема системы
Настройка регулятора проходила в автоматическом режиме результаты настройки показаны на рисунках 3а и 3б.
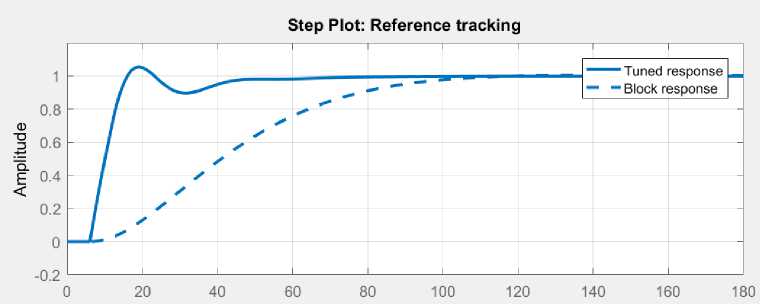
Рис 3а. Настройка ПИД –регулятора
Main RID Advanced Data Types State Attributes
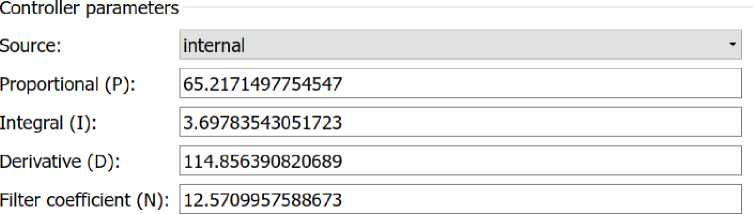
Рис. 3б. Настройка ПИД –регулятора
Строим переходные процессы по задающему воздействию (рис. 4-7)
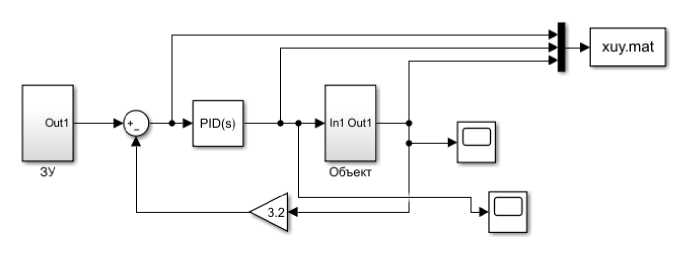
Рис. 4. Структурная схема системы по задающему воздействию
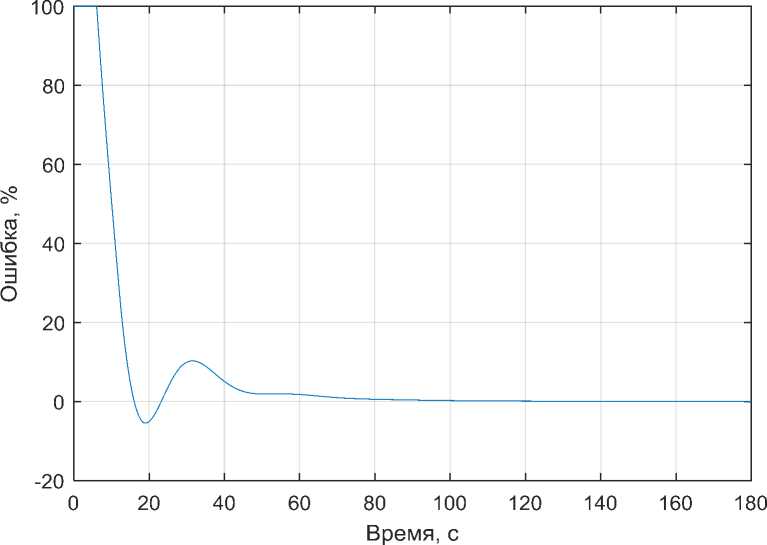
Рис. 5. Изменение регулирующей величины
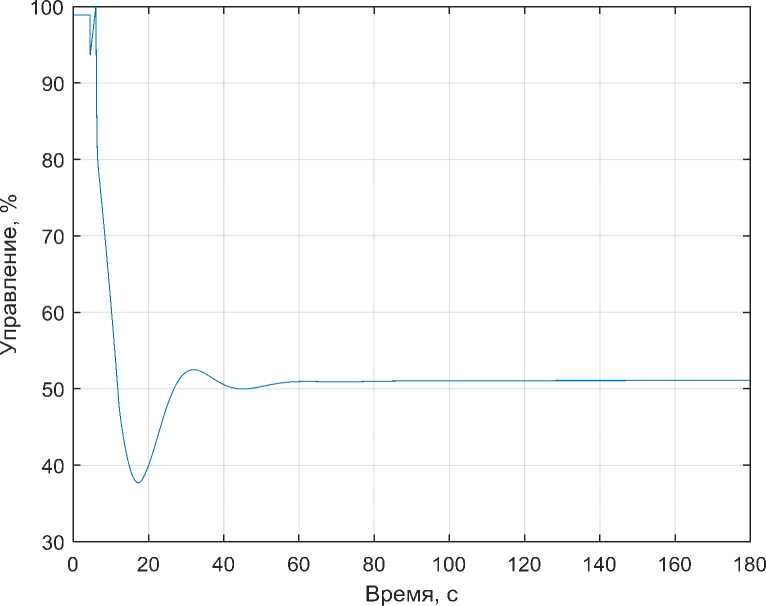
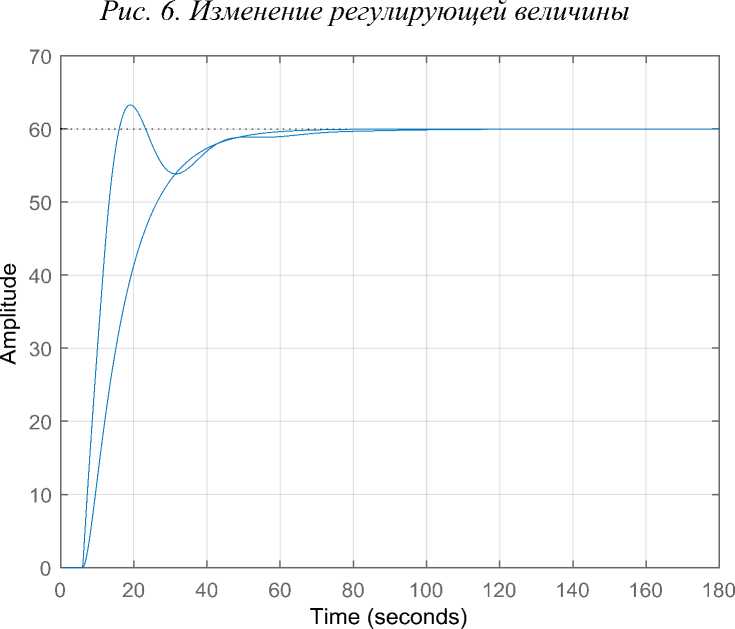
Рис. 7. Изменение регулируемой величины
Данные настройки обеспечивают минимальное перерегулирование 14% и минимальное время обработки сигнала.
Вывод: При расчете одноконтурной системы автоматического регулирования давления в барабане котла было предложено использовать ПИД –регулятор со следующими параметрами настройки: kр = 31,1105; Ти =0,5237; Т д =80,4507,
Предлагаемая система автоматического регулирования давления имеет величину перерегулирования не более 20% при статической ошибке равной нулю, что удовлетворяет требованиям задания на проектирование.
Список литературы Система автоматического регулирования давления котла ДКВР-4/13 ГМ с помощью пропорционально-интегрального регулятора
- Клюев А.С., Товарнов А.Г. " Наладка систем автоматического регулирования котельных агрегатов", Москва, "Энергия", 1970
- Плетнев Г.П. "Автоматизированное управление объектами тепловых электростанций", Москва, "Энергоиздат", 1981 г.
