Система автоматической синхронной подачи резервного питания в системах электроснабжения с двигательной нагрузкой

Автор: Деркачв Сергей Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 4 т.20, 2020 года.
Бесплатный доступ
Разработана система автоматической синхронной подачи резервного питания для систем электроснабжения с синхронными и асинхронными электродвигателями в случае потери питания от основного источника. В предложенном способе выполняется постоянный контроль мгновенных значений напряжений основного и резервного источников питания и определение величины угла между ними. Определение момента подачи команды на включение выключателя резервного источника питания выполняется по результатам аппроксимации зависимости величины угла между напряжениями основного и резервного источников питания от времени. Представленный алгоритм может быть использован в устройствах микропроцессорного быстродействующего автоматического включения резерва для обеспечения допустимых уровней токов статоров и электромагнитных моментов электродвигателей в режимах самозапуска и сохранения сложного непрерывного технологического процесса на промышленных предприятиях. Эффективность разработанной системы автоматической синхронной подачи резервного питания подтверждена с помощью методов математического моделирования и лабораторных испытаний на экспериментальном стенде.
Синхронное включение, непрерывный технологический процесс, двигательная нагрузка, переключение питания, автоматическое включение резерва
Короткий адрес: https://sciup.org/147234075
IDR: 147234075 | УДК: 621.311 | DOI: 10.14529/power200404
Automatic system of synchronous connection of backup power supply source in power systems with motor load
We developed an automatic system of synchronous connection of a backup power supply source in power systems with synchronous and asynchronous motors in case of power loss from the main source. Here, we propose performing continuous monitoring of the instantaneous voltage values of the main and backup power sources and determining the angle between them. The time to send the command to turn the backup power switch on is determined on the basis of the results of approximating the dependence of the angle between the voltages of the main and backup power sources on time. The proposed algorithm can be used in microprocessor fast-acting automatic transfer switch devices to ensure acceptable levels of currents of stators and electromagnetic moments of electric motors in self-starting modes and to maintain a complex continuous technological process at industrial enterprises. The effectiveness of the developed automatic system of synchronous connection of a backup power supply source has been confirmed using mathematical modeling methods and laboratory tests at an experimental stand.
Текст научной статьи Система автоматической синхронной подачи резервного питания в системах электроснабжения с двигательной нагрузкой
Современные системы электроснабжения содержат большое количество двигательной нагрузки в виде синхронных и асинхронных электродвигателей, единичная мощность которых на сегодняшний день достигает нескольких десятков тысяч киловатт. К таким системам относятся промышленные предприятия с непрерывным технологическим процессом, а также системы собственных нужд электростанций. С целью обеспечения надежного электроснабжения ответственных потребителей в таких системах должно быть предусмотрено автоматическое включение резервного питания в случае нарушения электроснабжения от основного источника питания.
Однако наличие синхронных и асинхронных двигателей в таких системах оказывает существенное влияние на уровень остаточного напряжения на секции. Это обусловлено тем, что при потере питания двигательная нагрузка переходит в режим группового выбега и генерирует на общих шинах остаточное напряжение, затухающее по амплитуде и частоте. Несинхронная подача резервного питания в этом случае приводит к появлению в обмотках статора токов, превышающих номинальные токи в 15–20 раз, что существенно сокращает ресурс двигателя [1]. Возникающие при этом электромагнитные моменты в электродвигателях превышают номинальные в 10–15 раз, что является неприемлемым для ряда механизмов, которые в режиме своей работы не допускают значительных ускорений [2].
В последние годы уровень развития микропроцессорной техники и коммутационных аппаратов позволяет создавать интеллектуальные системы подачи резервного питания для схем электроснабжения с двигательной нагрузкой. Таким образом, достаточно широкое применение получили микропроцессорные устройства быстродействующего автоматического включения резерва (БАВР) [3–8], которые с целью ограничения токов и моментов в режимах самозапуска могут выполнять подачу резервного питания при совпадении по фазе остаточного напряжения на секции с двигателями и напряжения резервного источника питания. Команда на включение выключателя резервного источника питания в этом случае подается с углом опережения, установленным с учётом времени работы выключателя. Однако такой подход не всегда обеспечивает синхронную подачу резервного питания, так как в зависимости от механической постоянной времени и загрузки электродвигателей скорость изменения угла между остаточным напряжением на двигателях и резервном источнике будет непостоянной.
Цель работы. Целью данной работы является совершенствование способа синхронной подачи резервного питания в системах электроснабжения с двигательной нагрузкой.
Обоснование способа синхронной подачи резервного питания.
С помощью математической модели, описанной в [9, 10], выполним моделирование изменения угла между остаточным напряжением на двигателях и резервным источником питания при разных коэффициентах загрузки электродвигателей в режиме потери питания. В качестве двигательной нагрузки приняты асинхронный двигатель мощностью 1700 кВт напряжением 6 кВ и один синхронный двигатель мощностью 2460 кВт напряжением 6 кВ.
Н а рис . 1 при в е дены гра фи ки из м е нен ия на пряж ени я на с е к ци и с дви га те лям и и ре з ервного ис точн ика п и та ни я, а та к ж е угл а м еж д у н им и при о т кл юче н и и осн ов н ого и ст очни ка п ит а н и я, коэ ф ф и ц ие н т за гр у з к и а син х ронного д в и гат е л я ра в е н 80 %, а синхронного двигателя – 7 0 %, постоянные времени – 2 и 1,5 с соответственно.
Как видно из рис. 1, в мом ен т в рем е ни 6 с произ ошл о откл юче н ие п и т а ни я от ос нов ного и с точни ка п и та ни я. Оп ти м ал ь ное в ре м я дл я в к л юч е ни я рез е рв ного и сточн и ка п итан ия с оста вл яе т 6,285 с, т. е. че ре з 0, 28 5 с , к огда у гол м еж д у ос т а точным н а п ряж е н и ем двиг а те л ей и ре з е рв ным и сточником будет равен 0 градусов.
Н а рис . 2 при в е дены гра фи ки из м е нен ия на пряж ени я на с е к ци и с дви га те лям и и ре з е рв ного ис точн ика п и та ни я, а та к ж е угл а м еж д у н им и при о т кл юче н и и осн ов н ого и ст очни ка п ит а н и я, коэ ф ф и ц ие н т за гр у з к и а син х ронного д в и гат е л я ра в е н 110 %, а синхронного двигателя –70 %, постоянные времени – 5 и 1, 5 с с оот в е тс т в е н но.
Из рис. 2 видно, что после потери питания в момент времени 6 с момент совпадения по фазе остаточного напряжения на секции с двигателями и резервного источника питания происходит в момент времени 6,22 с, т. е. через 0,22 с после потери питания от основного источника.
Полученные результаты моделирования (см. рис. 1 и 2) показывают скорость изменения угла между остаточным напряжением на секции с двигателями и резервном источнике питания при разных коэффициентах загрузки и механических постоянных времени. В связи с этим подача резервного питания с постоянным углом опережения может привести к возникновению недопустимых уровней токов и электромагнитных моментов электродвигателей, если включение произойдет при углах, превышающих допустимые значения, которые согласно [9] составляют диапазон от 320 до 360 градусов.
Учитывая вышеуказанные особенности при реализации синхронной подачи резервного питания, определение момента подачи резервного питания должно определяться автоматически, независимо от коэффициентов загрузки и электромеханических постоянных времени электродвигателей.
Для этого в предлагаемом способе в режиме реального времени выполняется определение косинуса угла между напряжениями на секции с двигателями и резервном источнике питания на
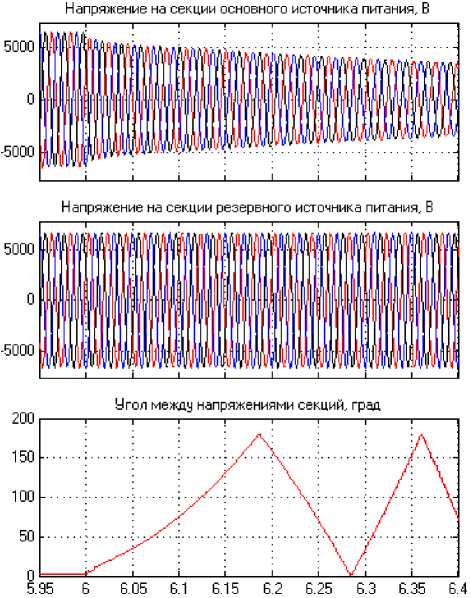
Рис. 1. Графики изменения напряжений основного и резервного источников питания при потере питания (постоянная времени асинхронного двигателя – 2 с, синхронного двигателя – 1,5 с)
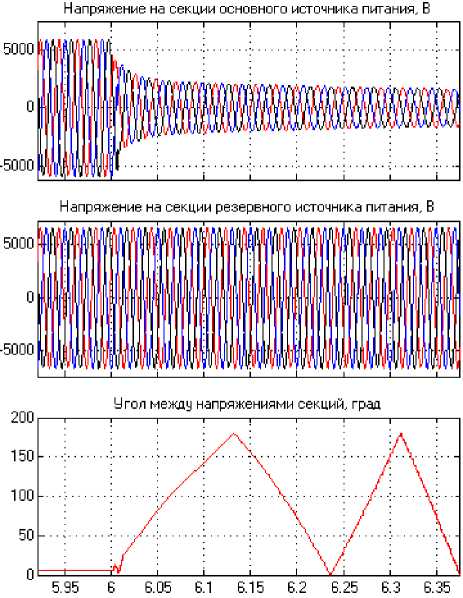
Рис. 2. Графики изменения напряжений основного и резервного источников питания при потере питания (постоянная времени асинхронного двигателя 5 с, синхронного двигателя 1,7 с)
основе измеряемых мгновенных напряжений по
формуле cos(^) =
U12 + U22-AU2
1^гии
где U 1 и U 2 – модули обобщенных векторов напряжений на электродвигателе и резервном источнике питания соответственно; ΔU – модуль вектора разности обобщенных векторов напряжения.
Модули обобщенных векторов U 1 и U 2 определяются по формулам:
U! = J l (u 1 A+u 1 B +u 1 c) ; (2)
U2 = J | (и 1 л + u 1 B + u l.c ) , (3)
а1 t l -t i ^t2 Х
X ^V(t 1 ) - Ф(^1 о ) -7^ (v(t1) - Ф(1 о )у (11)
Для определения момента времени совпадения по фазе остаточного напряжения на секции с двигате-
где u1A,u1B,u1C - мгновенные значения напряжений на секции с двигателями; u2Д,u2B,u2C - мгновенные значения напряжений на резервном источ-
лями и резервного источника питания, т. е. достижения углом φ значения 360 градусов, подставив в выражение (7) φ(t) = 2π, получим квадратное уравнение а1 • t1 + а1 • t + (ао - 2п) = 0. (12)
Из решения уравнения (12) определяется время совпадения по фазе остаточного напряжения на секции с двигателями и резервном источнике питания по формуле
t =
-а1± Ja 1 -4^a2^(a0—1n) 1^Й 2
нике питания.
Вектор разности обобщенных векторов напряжения A U определяется по формуле
2 2 2 2
A U = J 3 ( ( u1 A u 2 A ) +( u 1 B u 2 B ) +( u1C u 2 C ) ) • (4)
Таким образом, зная время достижения углом
Таким образом, подставив выражения (2), (3) и (4) в (1), получим
cos(^) =
“ 1Л^2Л + “ 1В^2В +“ 1Г “ 2С
J(Ui ^ + Ui b+ UiC)^(u2 ^ + U 2B+ U 2 C)
между остаточным напряжением на секции с двигателями и резервном источнике питания и зная время работы выключателя, можно определить время подачи команды на включение выключателя для синхронного включения резервного источника питания по формуле tX = t3 - tвыкл, (14)
Величина угла между напряжениями двигателей и резервным источником питания φ определяется по формуле
Ф = arccos(^) . (6)
Как показывают исследования [10, 11], ско-
где tвыкл - время включения выключателя
В качестве углов для фиксации времени их достижения косинусом угла между остаточным напряжением на секции с двигателями и резервного источника питания предлагается использовать углы фо = п/3 , ф = п/2 , ф1 = п .
рость изменения величины угла φ после отключения питания близка к скорости изменения квадратичной функции. Поэтому функция изменения величины угла от φ времени после отключения питания может быть представлена в виде квадратичной функции с коэффициентами ао, а1, а1 :
ф(t) = ао + а1 • t + а1 • t1 . (7)
Для определения коэффициентов ао,а1,а1 квадратичной зависимости угла φ от времени необходимо после отключения питания от основного источника в режиме реального времени фиксировать времена достижения косинусом угла cos(^) фиксированных значений, косинусов, соответствующих значениям углов ф(t0), ф(t1), v(t1) . За начало отсчета времени примем момент времени Т о , и тогда t o = 0 , t 1 = Т 1 - Т о , t 1 = Т 1 - Т о . Таким образом, получаем систему уравнений:
V(to) = ао + а1 • to + а1
^(t1) = ао + а1 • t1 + а1 • t1;(8)
V(t1) = ао + а1 • t1 + а1
Коэффициенты ао,а1,а1 могут быть опреде лены из решения системы (8) по формулам:
ао = ^(ТоУ;(9)
а 1 = 7 • (^(t 1 ) -а о -а 1 -1^ ;
С1
Результаты математического моделирования и практических исследований
На основе приведенных выражений (1)–(14) был разработан алгоритм для выполнения синхронной подачи резервного питания при потере питания от основного источника питания, блок-схема которого приведена на рис. 3.
На рис. 4 приведены результаты математического моделирования работы предложенного алгоритма синхронной подачи резервного питания. В качестве коммутационного оборудования при моделировании были приняты быстродействующие вакуумные выключатели с временем включения, равным 0,022 мс.
Как видно из рис. 4, потеря питания от основного источника питания произошла в момент времени 8 с, после чего величина угла между остаточным напряжением на секции с двигателями и резервным источником питания начала возрастать. В момент времени 8,308 с с учётом времени работы выключателя резервного источника питания была подана команда на его включение. В момент времени 8,33 с произошло включение выключателя резервного источника питания. Величина угла между остаточным напряжением секции с двигателями и резервным источником питания в момент включения составила 359 градусов.
Для технической реализации и экспериментальных исследований разработанный алгоритм был реализован на базе микроконтроллера STM32F407. На рис. 5 приведены результаты экспериментальных исследований на лабораторном стенде, который представляет собой двухтрансформаторную подстанцию с двигательной нагрузкой в виде асинхронных двигателей напряжением 0,4 кВ.
Как видно из рис. 5, потеря питания от основного источника питания произошла в момент времени 21,95 с, после чего началось возрастание величины угла между остаточным напряжением на секции с двигателями и резервным источником питания. В момент времени 22,311 с была подана команда на включение резервного источника питания с учётом времени работы его выключателя. В момент времени 22,333 с произошло включение выключателя резервного источника питания с углом между остаточным напряжением на секции с двигателями и резервным источником питания 358 градусов.
Полученные результаты математического моделирования и экспериментальных исследований показывают, что использование разработанного способа синхронной подачи резервного питания позволит обеспечить допустимый уровень токов и электромагнитных моментов двигательной нагрузки в режимах самозапуска [11].
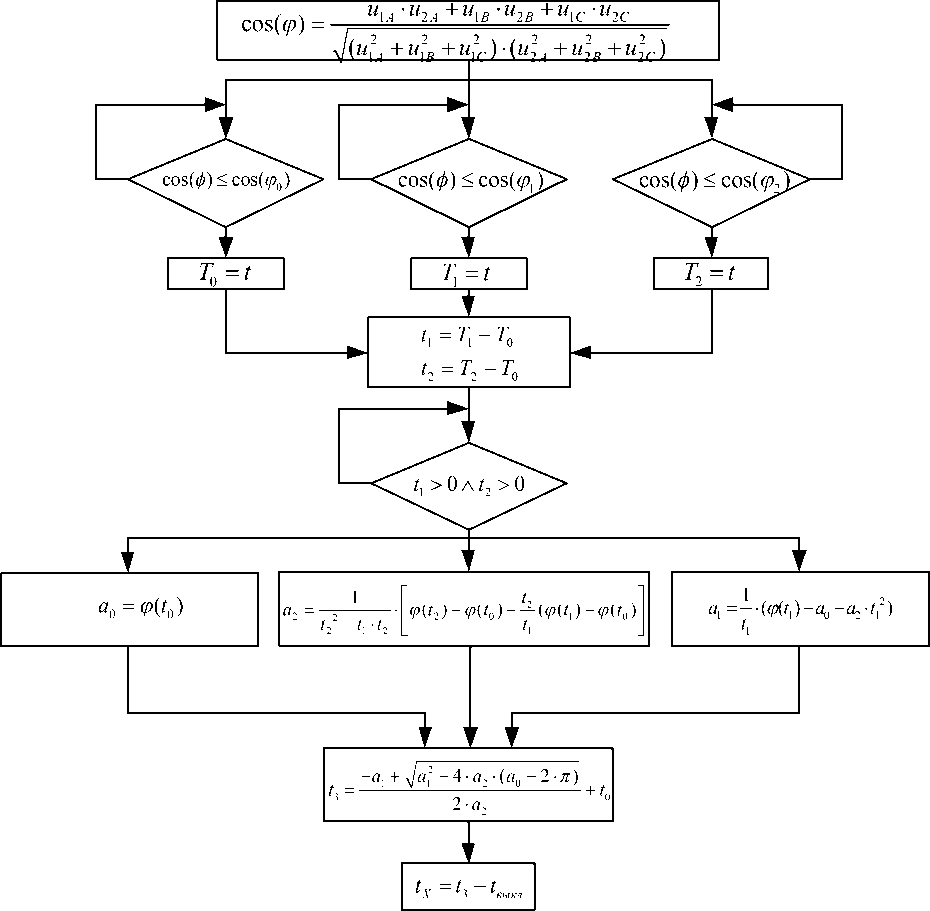
Рис. 3. Блок-схема алгоритма определения времени совпадения фаз между напряжениями основного и резервного источников питания
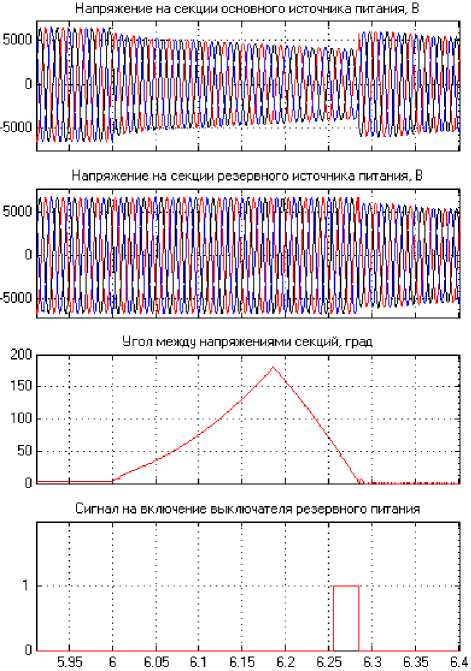
Рис. 4. Результаты математического моделирования алгоритма синхронной подачи резервного питания
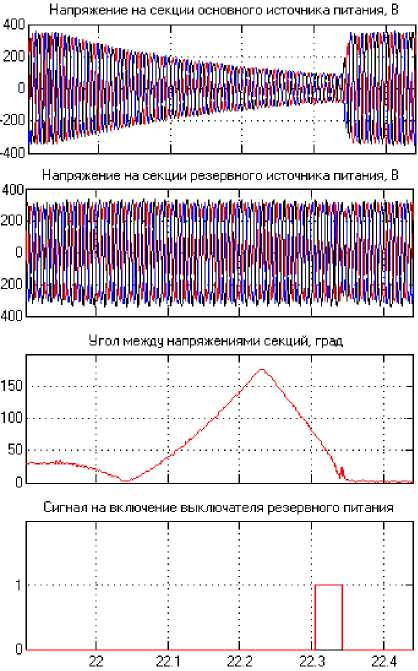
Рис. 5. Результаты экспериментальных исследований алгоритма синхронной подачи резервного питания
Выводы
-
1. Ус ов е рше нс тв ов а н спос об с и нх рон ной п ода чи рез е рв ного п ит а н ия в с ис те м а х эл ектрос на бж ен и я с д в и га тел ьной на гр у з кой, который поз вол яет прогн оз иров а ть в ре м я с ов па де н ия фа з ос т аточного напряж ен ия на с екц ии с дв и га тел ями и резервном источнике питания.
-
2. П од тв ерж д ена эффе кт ивнос ть ус ов е рше нств ов а н ного с пос об а с и нх р онн ой пода чи ре з е р в-
- ного питания из полученных данных математического моделирования и лабораторных испытаний для систем электроснабжения с электродвигатель-ной нагрузкой напряжением 6, 10 кВ.
-
3. Усовершенствован способ синхронной подачи резервного питания может быть использован в устройствах автоматического быстродействующего включения резерва в системах электроснабжения с двигательной нагрузкой.
Список литературы Система автоматической синхронной подачи резервного питания в системах электроснабжения с двигательной нагрузкой
- Сивокобыленко, В.Ф. Влияние режбы изоляции / В.Ф. Сивокобыленко, В.И. Костенко // Электрические станции.
- Сивокобыленко, В.Ф. Совершенствование схемы включения резервного питания асинхронных двигателей с учетом их группового выбега / В.Ф. Сивокобыленко, В.К. Лебедев, К.А. Кукуй // Научные труды ДонГТУ. Серия «Вычислительная техника и автоматизация».
- High Speed Transfer Device a better world. – ABB, 2010. – 49 с.
- Быстродействующее устройство АВР с однократным принципом определения нарушения нормального электроснабжения потребителей / В.А. Жуков, В.М. Пупин, С.И. Гамазин дование: Эксплуатация и ремонт.
- Киреева, Э. Современные устройства быстродействующего АВР / Э. Киреева, В. Пупин, Д. Гумиров // Главный энергетик . – 2005. – № 11 .
- A Modern Automatic Bus Transfer Scheme / Tarlochan S. Thakur, Bogdan Kasztenny // International Journal of Control, Automation, and Systems. (special edition). – P. 376–385.
- Gardell, J. J9 Working Group Report to the Rotating Machinery Protection Subcommittee of the IEEEPower System Relay Committee / Jon Gardell, Chairman Dale Fredrickson, Vice Chairman. – 2012.
- Никулов, И. Комплекс БАВР Быстродействие повышает надёжность электроснабжения / И. Никулов, В. Жуков, В. Пупин // Новости электротехники. – 2012. – № 4. – С. 2–4.
- Сивокобыленко, В.Ф. Анализ переходных процессов в двигательной нагрузке при переключениях питания на резервный источник / В.Ф. Сивокобыленко, С.В. Деркачёв // Известия высших учебных заведений. Электромеханика. – 2016. – № 5 (547) . – С. 69–74.
- Сивокобыленко, В.Ф. Математическая модель многомашинной системы для анализа поведения электродвигателей в режимах БАВР / В.Ф. Сивокобыленко, С.В. Деркачёв // Научные труды ДонНТУ. Серия «Электротехника и энергетика». – 2014. – № 1 (16). – С. 171–178.
- Ойрех, Я.А. Режимы самозапуска асинхронных электродвигателей / Я.А. Ойрех, В.Ф. Сивокобыленко. – М.: Энергия, 1974. – 96 с.
