Система подачи бурового станка с рекуперативным гидрообъемным приводом

Автор: Подэрни Роман Юрьевич, Хромой Михаил Рувимович, Прасолов Сергей Константинович
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 10, 2012 года.
Бесплатный доступ
Приведен анализ статических механических характеристик гидравлических систем подачи современных карьерных буровых станков. Рассмотрена схема рекуперативной гидравлической системы подачи карьерного бурового станка с жесткой статической механической характеристикой «скорость бурения - усилие подачи».
Карьерный буровой станок, система подачи, рекуперативный гидропривод, статическая механическая характеристика
Короткий адрес: https://sciup.org/140215419
IDR: 140215419 | УДК: 622.242.002.237
Текст научной статьи Система подачи бурового станка с рекуперативным гидрообъемным приводом
Сегодня эксплуатирующиеся на карьерах и разрезах Российской Федерации буровые станки имеют два типа привода системы подачи вращательного (СБШ -270 ИЗ, изготовитель ООО «ИЗ - КАРТЭКС им. П.Г. Коробкова »; СБШ - 160/200 - 40, изготовитель «УГМК -
РУДГОРМАШ») и поступательного (все модификации станка СБШ-250, изготовитель «УГМК - РУДГОРМАШ») действия. Причем в количественном отношении (до 90%) преобладают буровые станки с полиспастной системой подачи и с гидрообъемным приводом поступательного действия [1], в которых регулирование скорости подачи осуществляется при помощи дросселя [2]. Такие механизмы подачи отличаются простотой конструкции нерегулируемых гидромашин, компактностью и надежностью в работе. В то время как в буровых станках зарубежных производителей (например, фирм «Atlas Copco» и «Tamrock -Drilltech») регулирование скорости подачи осуществляется путем изменения объема рабочих камер насоса [1].
При работе долота его шарошки совершают сложное вращательное движение (Рис.1). Каждая из них, вращаясь вокруг своей оси, одновременно, вместе с корпусом долота, вращается вокруг некоторой оси долота. При этом вся система – корпус долота и шарошки – движется вниз, совершая вертикальные возвратно-поступательные колебания из-за наличия зубчатой поверхности шарошек [3].
Разрушение породы забоя происходит последовательно наносимыми ударами зубьев при постоянно приложенной к ним статической силе (осевой нагрузке).
Перекатывание шарошек по забою сопровождается углублением зубьев в породу. Отдельные зубчатые венцы многошарошечных долот отрабатывают свои кольцевые (в плане) участки забоя. При отсутствии скольжения зубьев одних шарошек другие могут иметь скольжение по породе. Эффективность разрушения шарошечным долотом той или иной горной породы будет зависеть от того, обеспечит ли данное долото, при внедрении зубьев в породу, ее сдвиг, необходимый для эффективного разрушения.
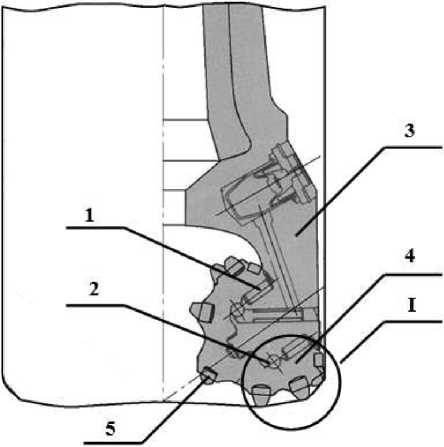
Рис.1. Трех шарошечное долото с твердосплавным вооружением в забое.
1-роликовый подшипник, 2-замковый шариковый подшипник, 3-лапа, 4-шарошка, 5-твердосплавное вооружение.
При перекатывании прижатых к забою шарошек вращающегося долота каждым элементом вооружения шарошки производится удар по забою [3].
Теоретически перекатывание венца одной шарошки по забою по схеме, приведенной на рисунке 1 можно видеть, что происходят периодические вертикальные перемещения, как самих шарошек, так и долота в целом. В действительности, когда шарошка перекатывается, но породе, происходит деформация породы и внедрение зубьев. Величина внедрения в разных породах будет различна. При хрупких породах она может исчисляться десятыми долями миллиметра.
Пульсирующий характер осевого усилия подачи (углубления долота -рис.2.) в пределах одного его оборота объясняется:
-
- разницей в величинах внедрения при контактах с породой одного или двух зубьев трех разных шарошек долота;
-
- недостаточной жесткостью полиспастной системы подачи долота на забой с гидрообъемным приводом, особенно при проходке скважины в трещиноватых или слоистых породах.
Следует отметить что, система подачи долота на забой с гидрообъемным приводом поступательного действия (с гидроцилиндрами подачи) с дроссельным регулированием скорости [3] в современных отечественных и зарубежных буровых станках практически не применяется.
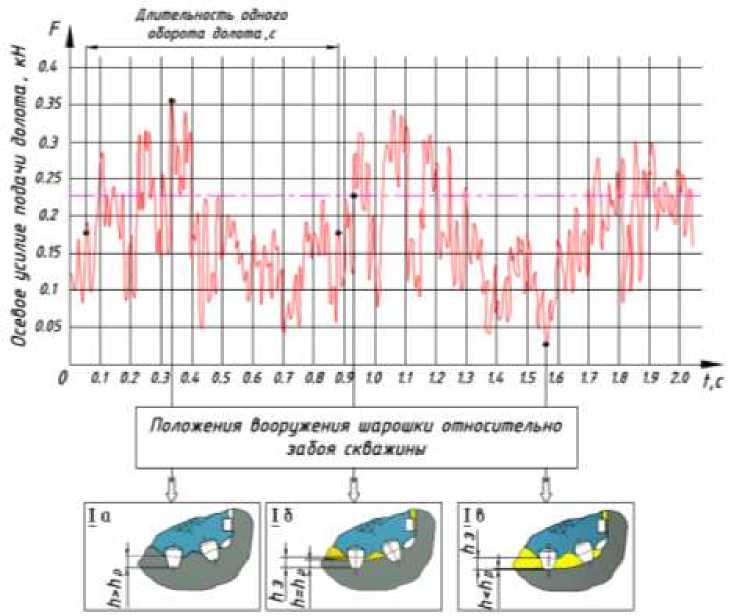
Рис.2. Глубина внедрения зуба шарошки долота в зависимости от амплитуды колебания осевого усилия подачи.
h - глубина внедрения твердосплавного зуба шарошки, hp – расчетная глубина внедрения твердосплавного зуба шарошки, hз – высота твердосплавного зуба.
В современных гидравлических системах подачи максимальное осевое усилие ограничивается настройкой нормально закрытого предохранительного клапана «КП1» (рис.3 а) на давление настройки – P 0 (Па) (точки 3, рис.3 б ), соответствующее осевому усилию достаточному для преодоления прочности буримой породы – σ (Па).
При этом регулятор объема рабочих камер насоса подачи «Н» – DН находится в нулевом положении (параметр регулирования насоса равен иН = 0). Затем, машинист активирует регулятор – DН до величины параметра регулирования иН > 0, при котором достигается максимально-возможная относительная скорость бурения –■ ^Г?/^тах и соответственно максимальновозможный расход рабочей жидкости, поступающей в гидроцилиндр «ГЦ» равный QН – QКЛ в данной породе (при заданной скорости вращения долота – ω рад/с). При этом предохранительный клапан «КП1» – открыт, а относительное давление в поршневой полости гидроцилиндра – «ГЦ» составляет величину –■ ^ п/^тах (точка 4 рис.3 б). Р П – давление в поршневой полости гидроцилиндра, Па. В процессе углубления скважины, особенно при её проходке в трещиноватых или слоистых породах, происходит стохастическое изменение прочности буримой породы - σ в диапазоне σmin < σ < σmax. Это обстоятельство приводит к соответствующему колебанию давления в диапазоне О ^ ПТ^Л-Х и к значительным (по амплитуде) колебаниям относительной скорости -^ ТПСЦС подачи долота, к высоким ударным нагрузкам на него, существенно уменьшая его ресурс.
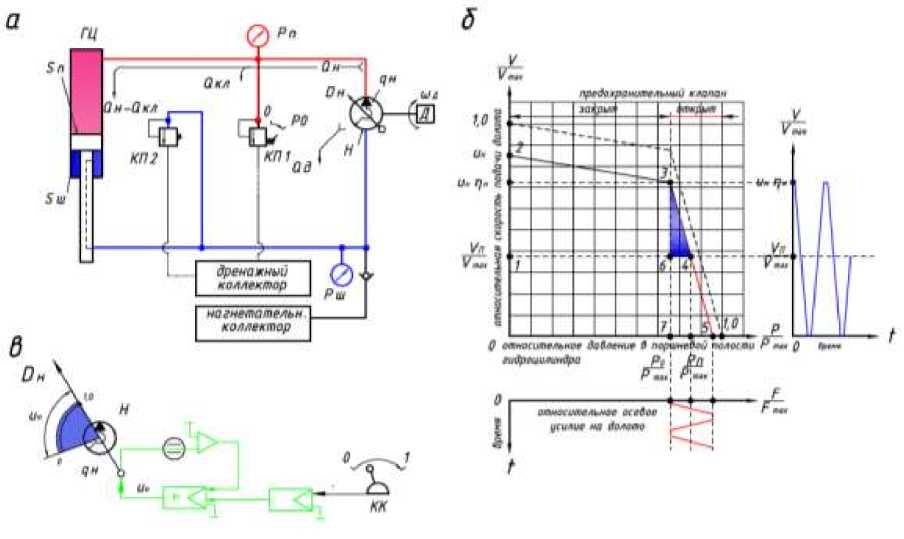
Рис.3. Принципиальная схема гидрообъемного привода подачи в режиме бурения:
а – схема потоков рабочей жидкости;
б – статическая и динамическая характеристика гидрообъемного привода;
в – мехатронная схема механизма регулирования скорости и усилия подачи в в режиме бурения.
Если машинист попытается увеличить подачу насоса регулятором объема рабочих камер – DН , то система подачи с большой вероятностью перейдет в автоколебательной режим с частотой «открытия – закрытия» предохранительного клапана – « КП1 » , а колебания скорости будут происходить в районе точки – 4 (рис.3 б ) статической механической характеристики системы подачи в диапазоне ^ ^^/ ^птах ^н ^7 н (где Чн -объёмный КПД насоса « Н », см. рис. 3 б ), что еще более увеличит динамические нагрузки на долото. То есть в режиме бурения традиционная схема гидрообъемного привода подачи (рис. 3 а ) работает на участке статической механической характеристики между точками 3 и 5 (рис. 3 б ) при открытом клапане.
Статическая механическая характеристика привода подачи в режиме бурения в координатах «относительная скорость - относительное давление» (рис.3 б) для отрезка, проходящего:
- через точки 2 - 3 с координатами (^ -^^.-;; = 0. . , *.,.,.. = < _) и
(^ ^^.-.. = г: ■' ;--.-::■, 1 1'.-.. = -■'-■?-) соответственно имеет вид:
/^^;; = <-Д-(1-^^\ (1)
где ,?- - объёмный КПД насоса - « Н », '- = О^, .к;
- через точки 3 - 5 с координатами (' '"';-:: = г": ' г; .-.. ; 1 1 '.:;.. = L -,?-) и
(^ г;.-.. = ^-С': 1 1'.-.. = 0) соответственно имеет вид и определится как:
^/Цпах — инПн№ (Р Po)/(Pynax ^o)L
где, *' <; - давление, соответствующее максимальному расходу через клапан «КП1» при нулевой скорости подачи долота под нагрузкой, Па.
Усилие подачи гидроцилиндра « ГЦ » (рис. 3 а ) определится как р _ с ( „ р _ р \
* ~ *-.■', Н (3), где "\- - коэффициент его мультипликации равный
; г2 - давление в штоковой полости, Па.
В свою очередь максимальное значение усилия подачи, развиваемое гидроцилиндром « ГЦ », определится из уравнения (3) с учетом того, что '2 “^ и составит величину при работе системы подачи на участке механической статической характеристики (рис.3 б):
р _ с ™ р
- от точки 2 до точки 3 при закрытом клапане « КП1 » * : ' - “- <■* :, Н,(4), или в относительной форме г : г:' <;. = г ! б , (5);
- от точки 3 до точки 5 при открытом клапане « КП1 » * ' - , Н, (6), или в относительной форме г ‘ "--;-:: = г ■' г--■.-:: , (7).
Здесь следует отметить, что абсолютная величина перепада давления - ^г = г'.-.. - б между точками 7 и 5 (рис. 3 б) определяется из равенства максимальной подачи насоса « Н » - 1' .:?.. ,';-^ и расхода рабочей жидкости через открытый клапан « КП1 » - -и“-."х ", _ г". 1 ■- -°- и составляет:
Рупах Pq = ^^Р^тааЛнЦ ^п/^кл) , Па (8) где ,: - плотность рабочей жидкости, кг/м3 (для минерального масла «Индустриальное» - И50 7 = ^-0 .<■?. v.- о ); Ц - коэффициент расхода рабочей жидкости через сечение клапана
кя
-
отношение активного сечения поршня к сечению входного отверстия клапана (“ _ ^-.' - - ■“ .-.).
Известно что, диапазон изменения давления настройки предохранительного клапана «КП1» составляет ,-г\де-.л1 где "‘ -коэффициент кратности минимального давления настройки предохранительного клапана (осевого усилия), определяемого отношением максимально допустимых усилий на долото для максимального и минимального его диаметров, используемых в данной конструкции бурового станка. По данным исследований, приведенных в монографии LbJ
= ? — ? Ц
К , то есть давление, соответствующее максимальному расходу через клапан «КП1» оставит Ртах — (^ : 6)P0 ,(9).
Подставляя выражение (5) в уравнение (1), имеем зависимость скорости от усилия подачи долота на забой в относительной форме:
V/Vmax = UH[1 - (1 - Лн) Р/Fornax] , (10)
Подставляя выражение (7) в уравнение (2), с учетом результата (9) после соответствующих алгебраических преобразований имеем зависимость скорости от усилия подачи долота на забой в относительной форме:
V/Vmax = (1,2 - 1,25)здн(1 - F/F^ , (11)
При бурении породы, имеющей пустоты или трещины, сопротивление внедрению долота падает, и долото ускоряется до максимальной скорости. Когда прочность буримой породы резко повышается, буровой став резко теряет скорость до минимальной, при этом возникают удары, разрушающие долото и всю систему подачи.
Следует отметить, что площадь ограниченная точками 3-4-6 (рис.3 б ) статических механических характеристик традиционного привода подачи, характеризует, с учетом объемных потерь в насосе - « Н », относительную мощность –■ ^кл потока рабочей жидкости – QКЛ , проходящей через открытый предохранительный клапан – « КП1 », которая не участвует в разрушении буримой породы, а идет только на её нагрев, уменьшая КПД всей системы подачи.
N^ = 50(uHT]H - Vn/Vmax) (Pn - P^/Pmax ,% (12)
Предлагаемая схема рекуперативной гидравлической системы подачи долота на забой направлена на устранение негативных свойств, присущих традиционной системе подачи.
В отличие от последней (рис.3 а ), рекуперативная гидравлическая система подачи долота на забой (рис.4 а ) включает: дополнительную регулируемую гидравлическую машину – « М » с объемной постоянной - Qm = Qh , и объемным КПД - 4m , установленную в режиме бурения по направлению потока рабочей жидкости между штоковой полостью гидроцилиндра – « ГЦ » и всасывающей магистралью насоса подачи – « Н »; реле давления « РД », подключенное к гидролинии поршневой полости цилиндра « ГЦ » и мехатронную систему управления регуляторами объема рабочих камер насоса подачи « Н » – DН и мотора – « М » - DМ .
В рекуперативной системе подачи как и в традиционной системе подачи ограничение максимального осевого усилия осуществляется настройкой нормально закрытого предохранительного клапана « КП1 » (рис.4 а ) на давление Fo .
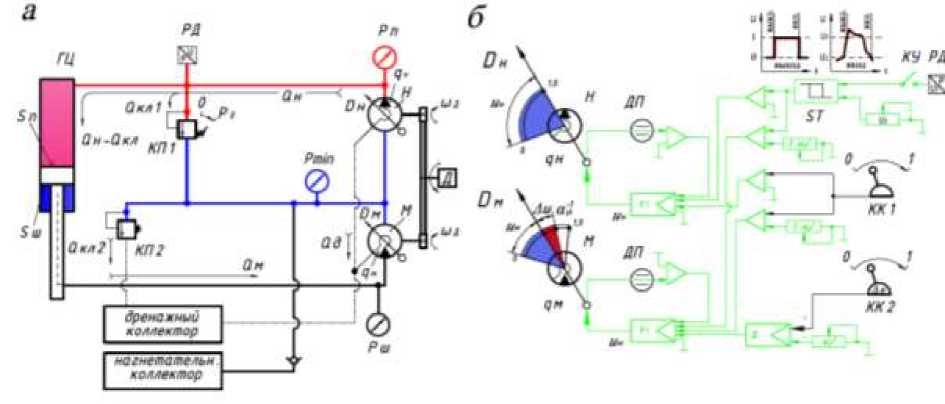
Рис.4 а - рекуперативная схема гидрообъемного привода подачи в режиме бурения;
б - Мехатронная схема механизма регулирования скорости и усилия подачи в рекуперативной схеме гидрообъемного привода подачи в режиме бурения.
Мехатронная система управления регуляторами DH и Dm объема рабочих камер насоса подачи « Н » и мотора « М » (с параметрами регулирования насоса и мотора - иН и и М соответственно) включает: - командоконтроллер управления скоростью подачи долота на забой -
«КК1» (управления положением регуляторов объема рабочих камер DH и Dm насоса подачи «Н» и мотора «М» (рис.4 б), при этом задаются и одновременно изменяются величины параметров регулирования насоса и мотора - иН и иМ;
-
- командоконтроллер ограничения осевого усилия на долото - « КК2» (управления положением регулятора объема рабочих камер Dm мотора « М »), при этом уменьшается диапазон параметра регулирования объема рабочих камер мотора - иМ на величину - ^L' ;
-
- кнопку активации « КУ » реле давления « РД ».
Когда командоконтроллеры « КК1» и « КК2» не активированы, регуляторы объема рабочих камер насоса подачи « Н » - DH и мотора - «М » - Dm находятся в нулевом положении ( иМ = иН = 0). За счет разности активных сечений поршневой - - и штоковой - - - полостей гидроцилиндра « ГЦ » из условия неразрывности потока рабочей жидкости от насоса « Н » к мотору « М » требуется начальное ограничение диапазона регулирования параметра - ^r-f мотора на величину 1 — \- .
Вначале машинист кнопкой «КУ» отключает реле давления «РД» от мехатронной системы управления. Затем активирует командоконтроллер управления скоростью подачи долота на забой - «КК1» (одновременно задает параметры регулирования насоса и мотора - иН и иМ соответственно в диапазонах
и
< ГУ-1
м — до открытия клапана « КП1» -
).
Далее, машинист активирует командоконтроллер ограничения осевого усилия на долото – « КК2» (уменьшает диапазон регулирования параметра объема рабочих камер мотора – иМ до закрытия клапана « КП1» на величину - Ди (рис. 4 б), и давление в поршневой полости гидроцилиндра « ГЦ » принимает значение ^7 — ?0 ). Затем, машинист кнопкой « КУ » подключает реле давления « РД » к мехатронной системе управления. При этом при заданной частоте вращения долота – ω , в конкретной породе прочностью – °, достигается максимально-возможная скорость бурения – VП .
Превышение давления в поршневой полости более величины Fo (режим стопорения долота в забое) приводит к срабатыванию реле давления « РД » и триггер Шмитта – « ST » мехатронной системы управления переводит регуляторы объема рабочих камер насоса « Н » и мотора « М » в нулевое положение. Далее машинист кнопкой « КУ » отключает реле давления « РД » и заново настраивает параметры режима бурения с помощью командоконтроллеров « КК1 » и « КК2 ». При этом кратковременные скачки давления в поршневой полости не приводят к срабатыванию триггера Шмитта мехатронной системы управления.
Следует отметить, что рекуперация мощности в системе подачи > О гР- возможна только при условии, когда ( - давление в штоковой полости гидроцилиндра «ГЦ» - давление рабочей жидкости на входе в мотор «М», Па).
В свою очередь, давление в штоковой полости гидроцилиндра «ГЦ» -FUI определится как частное от деления мощности, рекуперированной в системе подачи - ^R , равной Nr — Дидмй)д?;мРш , Вт, (13) на величину расхода рабочей жидкости в моторе - Qm — С^1 ^и^Чм^дЛм, м3/с, (14), с учетом того, что *ш max , после соответствующих алгебраических преобразований получим величину давления в штоковой полости гидроцилиндра «ГЦ» в зависимости от давления настройки р предохранительного клапана - :
Рш — a^/XuPo/^a^1 Ди), Па,
Далее подставляя результат (15) в уравнение (3) и поделив его на выражение (4), имеем зависимость в относительной форме усилия рекуперативной системы подачи от величины уменьшения диапазона регулирования параметра объема рабочих камер мотора – :
F/Fmax = 1 * Ди/(« 1
,
(16) забой
При этом регулирование усилия подачи долота на осуществляется заданием (смотри рис. 4 б) величины уменьшения диапазона регулирования параметра объема рабочих камер мотора – Ди в диапазоне О < Ди < 0,5<7^1, (17).
Таким образом, статическая механическая характеристика привода подачи в режиме бурения в координатах «относительная скорость - относительное давление» определяется статической механической характеристикой мотора, которая по аналогии с уравнением (1) имеет вид:
V/Vm„ = (а;1 - Ди)[1 - (1 - 71М)РШ/РО]
Далее, подставляя результат (16) в выражение (18) с учетом уравнения (5), получаем зависимость в относительной форме скорости подачи рекуперативной системы, образованная величинами параметра уменьшения диапазона регулирования объема рабочих камер мотора – Ди в диапазоне О < Ди < 0,5(7^ 1 .
^П^тах = ^М^ 1 + Ди(1 — 2^м), (19)
Анализ графической интерпретации уравнений (16), (18) и (19), приведенных на рисунке 5, свидетельствует, что в номинальном режиме
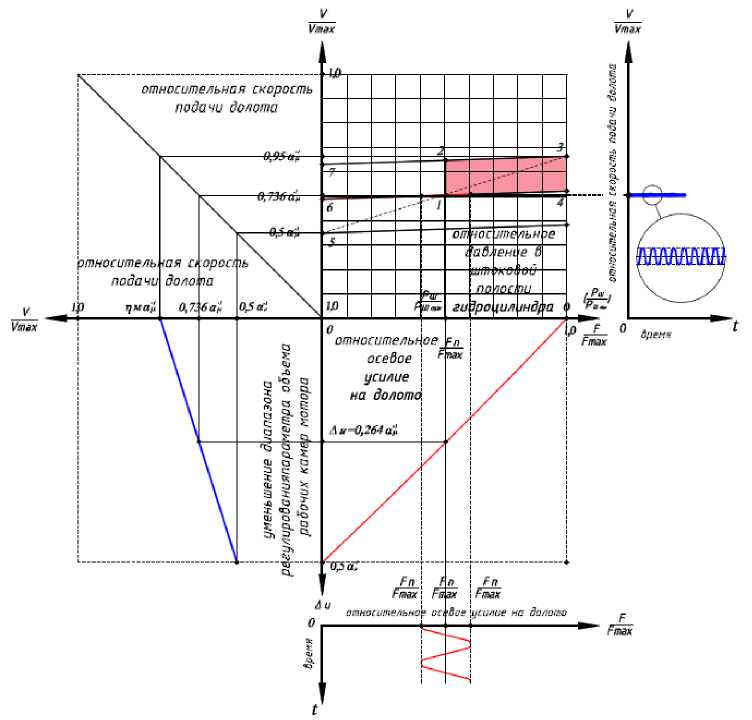
Рис.5. Статическая и динамическая характеристики рекуперативного гидрообъемного привода.
бурения (^ш н) площадь, ограниченная точками 1-2-3-4 статической механической характеристики мотора, характеризует относительную мощность, рекуперированную в гидравлическом контуре, возвращаемую приводному двигателю системы подачи в виде крутящего момента:
Мм = /\ицмт]мРшн , Нм, (20)
Таким образом, рассмотренная рекуперативная система подачи бурового станка, имея достаточно жесткую статическую механическую характеристику «скорость внедрения долота – осевое усилие подачи», позволит обеспечить:
-
- бурение с расчетной глубиной внедрения твердосплавного вооружения шарошки (см. рис. 6 I б ) за счет снижения зависимости скорости бурения от колебаний прочности буримой породы;
-
- ограничение усилия подачи во всем диапазоне скорости бурения с большей эффективностью, чем любая из известных гидрообъемных систем подачи.
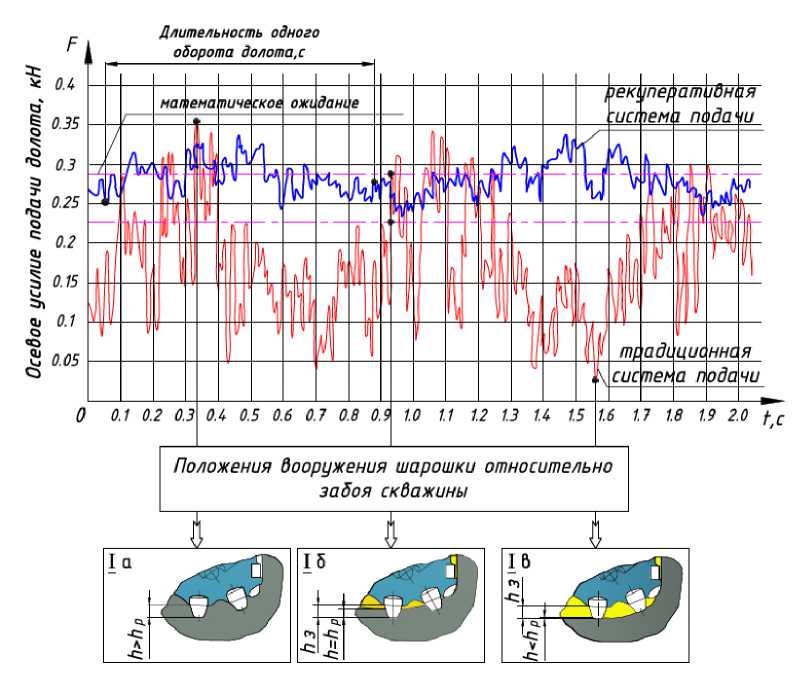
Рис.6. Амплитуда колебания осевого усилия подачи при применении рекуперативной схемы гидрообъемного привода подачи и её математическое ожидание.
h – глубина внедрения твердосплавного зуба шарошки, hp – расчетная глубина внедрения твердосплавного зуба шарошки, hз - высота твердосплавного зуба.
Список литературы Система подачи бурового станка с рекуперативным гидрообъемным приводом
- Poderni R.Y., Chromoy M.R. & Sandalov V.F. Blast hole drill rig with extendable mast The 5-th International Symposium on Mine Planning and Equipment Selection. Sao Paulo. Brazil. Proceedings, 1996. -pp. 387-393.
- Скорняков Н.М., Кузнецов В.В., Ананьев К.А. Механизм подачи с дроссельным регулированием скорости.//Горное оборудование и электромеханика, изд-во «Новые технологии», 2007. -№3. -С. 20-22.
- Мокшин А.С., Владиславлев Ю.Е., Комм Э.Л. Шарошечные долота. -М.: Недра, 1971. -216 с.
- Poderni R.Y. and others, 1989. Power drive for working organ of industrial machine. Australian patent AU-B-79193/87.
- Коваль П.В. Гидравлика и гидропривод горных машин: Учебник для вузов по специальности «Горные машины и комплексы». -М.: Машиностроение, 1979. -319 с., ил.
- Подэрни Р.Ю. Механическое оборудование карьеров: Учебник для вузов. -7-ое изд., перераб. и доп. -М.: Изд-во «Майнинг Медиа Групп», 2011 640 с.: ил.
