Система поддержки принятия решений на основе многоатрибутивных методов

Автор: Антамошкин О.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (25), 2009 года.
Бесплатный доступ
Представлены многоатрибутивные методы принятия решений, обеспечивающие решение задач выбора оптимального состава бортовой системы космических аппаратов «Гонец-М» и « Глонасс-М» при многих критериях. Приведены алгоритмы, реализующие процедуры многоатрибутивного выбора и концептуальная схема системы поддержки принятия решений на основе данных методов.
Проектирование спутников навигации и связи
Короткий адрес: https://sciup.org/148176055
IDR: 148176055 | УДК: У
Decision support system on the basis of multiattributive methods
In the paper the multiattributive methods of decision-making providing problem solving a choice of optimal structure of on-board system of a space crafts «Gonets-M» and «Glonas-M» at many criteria are presented. The algorithms realizing procedures of a multiattributive choice and the conceptual circuit of a decision support system on the basis of given methods are resulted.
Текст краткого сообщения Система поддержки принятия решений на основе многоатрибутивных методов
Использование многоатрибутивных методов принятия решений при проектировании бортовой системы космического аппарата позволяет учесть возрастающие тактико-технические требования к бортовой аппаратуре и перспективные тенденции развития современной электронно-вычислительной аппаратуры, а также значительно сократить время разработки и оптимизировать финансовые затраты [1].
В СППР реализуется модифицированный метод упорядоченного предпочтения через сходство с идеальным решением (TOPSIS), преимуществом которого является возможность решения задачи принятия решений при бесконечном числе альтернатив. Оба критерия – «наикратчайшее расстояние до позитивного идеального решения» и «наибольшее расстояние до негативного идеального решения» – заменяются на «как можно ближе к PIS» и «как можно дальше от NIS». Термины «как можно ближе» и «как можно дальше» – нечеткие, и, чтобы их смоделировать, применяются функции принадлежности из теории нечетких множеств: dp PIS (уступки) и dp NIS (поощрения) – расстояния до PIS и NIS соответственно.
Вместо k исходных целей будем использовать цели «минимизировать расстояние до PIS dp PIS » и «максимизировать расстояние от NIS dp NIS ». Получим задачу: min dp PIS ( x ); max dp NIS ( x ), х ∈ Х.
В связи с тем, что эти две цели обычно конфликтуют друг с другом, невозможно одновременно достичь их индивидуального оптимума. Каждая цель достигает только части своего оптимума. При детальном рассмотрении функции принадлежности m1( х ) и µ 2( х ) – это две невозра-стающие/неубывающие монотонные функции между точками экстремума ( d p PIS ) * и ( d p NIS ) * . Функции m1( х ) и m2( х ) показывают степени предпочтения «как можно ближе к PIS» и «как можно дальше от NIS».
Компромиссное решение х * достигается решением задачи max{min[ µ 1( x ), µ 2( x )]}.
Используемый fuzzy-метод фактически переформулирует задачу многоцелевого принятия решений как задачу нечеткого программирования. Пользователь получает возможность сгенерировать недоминируемое множество решений.
Реализуемый в предложенной системе метод учета неопределенности и субъективности оценок при выборе недоминируемого решения учитывает не только неопределенность в оценках ЛПР, но и его интуитивные склонности относительно реальных характеристик атрибутов и их специфики [2].
Метод рассматривает т альтернатив, представляющих собой различные составы бортовой системы, из которых необходимо сделать выбор. Каждому выбору соответствует п значений атрибутов.
Согласно концепции «идеальной точки», обозначим через А * ( x 1 * , x 2 * , …, xn * ) «идеальную» альтернативу, для которой xi * предпочтительней xi ( k ) (атрибут альтернативы А ( k ) ) для любых k и i . Отметим, что некоторые значения xi * могут и не соответствовать значениям атрибутов альтернатив А ( k ) рассматриваемого множества.
Обозначим субъективную оценку относительной важности каждого i -го атрибута с помощью нечеткого множества Нi , Нi описывается своей характеристической функцией вида fHi : Hi → [0,1], которая характеризует предпочтительность А ( k ) по i -му ат рибуту. Очевидно, что fH i( xi * ) = 1, так как xi * – наилучшее возможное значение i -го атрибута.
Выбор альтернативы представляет собой попытку минимизировать «расстояние» между А ( k ) и А * , которое является функцией субъективных предпочтений, характеризующих квалификацию, опыт практической работы, уровень знаний о предметной области, а также зависит от уровня информированности о представленном для выбора реальном множестве альтернатив в конкретной ситуации.
Благодаря сгенерированным коэффициентам в процессе выбора учитывается неопределенность, присущая данной задаче. Очевидно, что если для всех xi ( k ) (1 ≤ k ≤ m ) на этапе принятия решения информация о предпочтительности недоступна (скрыта), то неопределенность по i -му атрибуту становится относительно высока. Однако высокий уровень для xi ( k ) и низкий для xi (l) , где k ≠ l, снижает неопределенность по i -му атрибуту. В решающем алгоритме применяется наиболее часто используемая мера неопределенности – энтропия.
Чтобы выразить нечеткое множество Нi , определяется оценка степени принадлежности элемента x i ( k ) этому нечеткому множеству. Это позволяет найти в дальнейшем неопределенность по i -му атрибуту как функцию энтропии еi .
В расстоянии между двумя альтернативами весовые коэффициенты, зависящие от неопределенности, будут малы, если неопределенность высока. Определяем коэффициент сатисфакции по i -му атрибуту S i . Когда неопределенность, соответствующ а я i -му атрибуту, высока, то еi близко к 1 и коэффициент S мал.
При относительных весах по важности wi , назначаемых ЛПР i -му атрибуту априори, можно определить весовой коэффициент, комбинирующий нечеткость и субъективную оценку.
Для того чтобы определить, насколько удалены друг от друга альтернатив ы А ( k ) и А * введем функ цию расстояния Dis[ A * , A ( k ) ] = ∑ n ( Si ⋅ (1 - fHi ( xi ( k ) ))) 2 . Значение i = 1
Dis( А * , А ( k ) ) соответствует среднеквадратичному отклонению Dis ( i ) . Нашей целью является выбор альтернативы A ( k 0) , котор ая максимально близ ка к A * : Dis[ A * , A ( k 0) ] = Dis k min [ A * , A ( k ) ].
Процедура выбора недоминируемого решения, основанная на субъективных предпочтениях ЛПР, выглядит следующим образом.
Шаг 1. Назначение идеальной альтернативы. Представление пользователю всех имеющихся недоминируемых альтернатив.
Шаг 2. Назначение пользователем fHi ( xi ( k ) ) характеризующих предпочтительность k -й альтернативы по i -му атрибуту для ∀ k , i . Назначение весовых коэффициентов wi , определяющих относительную важность i -го атрибута.
Шаг 3. Определение наилучшей альтернативы путем выполнения следующих вычислительных процедур:
-
– расчет частных энтропий по каждому атрибуту еi ∀ i ;
-
– расч е т коэффициентов сатисфакции по каждому атрибуту S i ∀ ;
-
– расчет весовых коэффициентов S i i , комбинирующих нечеткость и субъективную оценку;
-
– расчет значений Dis ( i ) для ∀ i , определяющих расстояние между k -й альтернативой и идеальной альтернативой по i -му атрибуту;
-
– расчет Dis( А * , А ( k ) );
-
– определение наилучшей альтернативы путем минимизации Dis( А * , А ( k ) ).
Шаг 4. Предоставление ЛПР значения Dis( А * , А ( k ) ) и соответствующего ему решения. Если полученное решение удовлетворяет ЛПР, то завершение, иначе – переход на Шаг 1 [3].
Рассмотрим концептуальную схему системы поддержки принятия решений, основанную на приведенных методах (см. рисунок).
Программное приложение реализовано на языке С++ с использованием средств визуального программирования приложений Borland C++ 5.0. Это позволило наиболее полно использовать возможности, предоставляемые объектно ориентированным подходом в программировании, а также наиболее качественно разработать графический интерфейс приложений, работающих под управлением операционной системы Microsoft Windows от версии 3.1 и выше.
Система работает с пользователем (оператором) в интерактивном режиме. Пользователь сам выбирает метод вычисления. Также он может контролировать любые изменения параметров и изменять настройки системы и исходные данные.
Анализ работы СППР показал, что наилучшие результаты работы алгоритма проявляются при параметре р = 2.
Для исследования работы алгоритма fuzzy-метода в условиях поставленной задачи использовались различные начальные данные (значения стоимости и надежности предлагаемых блоков, требуемая глубина резервирования и др.). Проводится анализ работы метода в зависимости от таких данных, задаваемых ЛПР, как предпочтительность критериев и разность между суммой глобальных и действительных процентов достижимости по всем целям.
Fuzzy-метод генерирует недоминируемое решение на основании заложенной в него информации о следующих параметрах: количестве типов блоков; количестве вариантов каждого типа блоков; количестве и виде принятых к рассмотрению критериев эффективности; значении характеристик (в данном случае – стоимости и надежности) предлагаемых вариантов блоков; требуемой глубине резервирования блоков.
С помощью fuzzy-метода ЛПР, изменяя значения параметров, может получить недоминируемые решения,
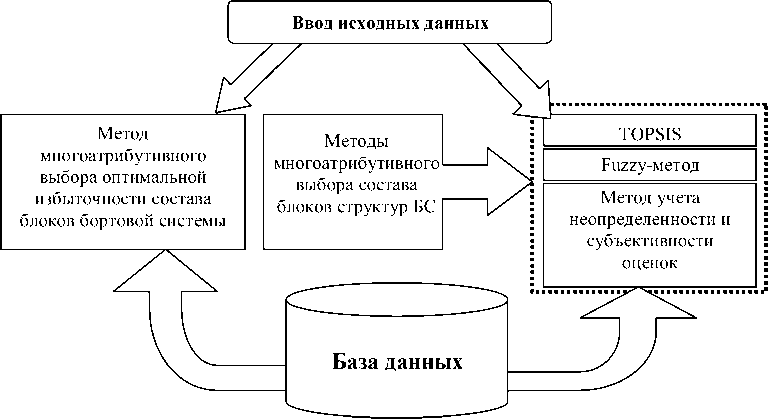
Концептуальная схема СППР
из которых можно сформировать множества различной мощности. При необходимости в процесс формирования множества недоминируемых решений может включаться несколько экспертов.
Процедура метода учета неопределенности и субъективности оценок выделяет из этого множества одно решение, основываясь на индивидуальных предпочтениях ЛПР. Выбор среди нескольких альтернатив осуществляется, основываясь на значениях следующих параметров, заданных ЛПР: предпочтения альтернатив по каждому критерию fHi ; весовых коэффициентов атрибутов wi [4].
Проведенные исследования показывают, что увеличение мощности множества недоминируемых решений может вести к улучшению решения, однако с другой стороны, его увеличение нецелесообразно тогда, когда пользователь не в состоянии дать непротиворечивую оценку всем предоставленным ему альтернативам.
