Система поддержки принятия решения при проезде перекрестка

Автор: Корнуков Н.О., Гаврилина В.А.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 6 (24), 2017 года.
Бесплатный доступ
В данной статье дается понятие миварной технологии накопления данных, ее преимущества и особенности. На примере задач, которые должен решать искусственный интеллект при управлении автомобилем во время проезда перекрестка, показан набор необходимых действий для успешного маневра и его реализация при помощи миварного подхода.
Система поддержки принятия решений, проезд перекрестка, мивар, искусственный интеллект, миварные сети, экспертные системы, беспилотные автомобили, интеллектуальные транспортные системы
Короткий адрес: https://sciup.org/140271903
IDR: 140271903
Decision support system for the intersection
The article is devoted to the term of mivar technology of data accumulation, its advantages and features. Using the examples of tasks that artificial intelligence solves when crossing a crossroad it describes a set of actions for successful road maneuver with the help of the mivar approach.
Текст научной статьи Система поддержки принятия решения при проезде перекрестка
Summary: The article is devoted to the term of mivar technology of data accumulation, its advantages and features. Using the examples of tasks that artificial intelligence solves when crossing a crossroad it describes a set of actions for successful road maneuver with the help of the mivar approach.
В современной науке под исследованиями, связанными с моделированием интеллектуальных возможностей человека, понимают научное направление, занятое проблемами синтеза автоматических структур, способных решать сложные задачи информационного обеспечения различных видов человеческой деятельности. Обычно – это задачи, для которых не существует готовых правил или примеров решения. Разработать правила решения такой задачи может человек, обладающий необходимыми знаниями, опытом и интеллектом. Но если создать компьютерную модель, в памяти которой будут содержаться знания такого человека, запрограммированы его опыт и интеллектуальные способности, то этой моделью можно будет пользоваться для решения множества подобных задач.
Развитие информационных систем несет за собой постепенное изменение мира от простого к сложному, но облегчающему жизнь, дающему нам множество новых возможностей. Касается это и систем управления автомобилями. Сейчас использование компьютеров в автомобилях - это стандарт, от которого отталкиваются автопроизводители в дальнейших своих разработках.
Миварный подход разработан для семантического анализа и адекватной трансляции гуманитарных гносеологических и аксиологических принципов при создании искусственного интеллекта (ИИ). Он объединяет научные области компьютерных наук, информатики и дискретной математики, базы данных, экспертные системы, теорию графов, матрицы, системы логического вывода. Подход включает две основные технологии:
Миварная технология накопления информации - это способ создания глобальных эволюционных баз данных и правил (знаний) с изменяемой структурой на основе адаптивного дискретного миварного информационного пространства унифицированного представления данных и правил, базирующегося на трех основных понятиях "вещь, свойство, отношение". Данная технология предназначена для хранения любой информации с возможным эволюционным изменением структуры и без ограничений по объему и формам представления.
Миварная технология обработки информации - это способ создания системы логического вывода или "автоматического конструирования алгоритмов из модулей, сервисов или процедур" на основе активной обучаемой эволюционной миварной сети правил с линейной вычислительной сложностью логического вывода, управляемого потоком входных данных. Данная технология предназначена для обработки информации, включая логический вывод, вычислительные процедуры и "сервисы".
Фактически, миварные сети позволяют развить продукционный подход (причинно-следственные зависимости «Если - То») и создать автоматическую обучаемую логически рассуждающую систему.
Миварная сеть (МС) - это двудольный граф, который может быть описан в виде двухмерной матрицы, в которой записывается информация о предметной области решаемой задачи. [1]
Обобщенно говоря, миварная сеть обеспечивает формализацию и представление человеческих знаний в виде связанного многомерного пространства. МС - это способ представления в виде двудольного ориентированного графа части информации миварного пространства, образуемой объектами и связями между ними, которые в совокупности представляют модель данных предметной области, при этом связи включают в себя правила для обработки объектов. Другими словами, МС предметной области является частью знаний миварного пространства по этой области.
Например, группой российских ученых из МАДИ разработаны алгоритмы управления автомобилем в автоматическом режиме [2], выбран набор ключевых технологий функционирования системы взаимодействия интеллектуальных транспортных средств [3], созданы прототипы автономных колесных транспортных средств в их составе [4] и предложена методология создания систем управления движением автономных колесных транспортных средств, интегрированных в интеллектуальную транспортную среду [5]. В то же время, еще в 2011 году был проведен анализ возможностей миварного подхода для систем искусственного интеллекта и робототехники [6], а в 2016 году были обоснованы перспективы создания автономных интеллектуальных роботов, включая и беспилотные автомобили, на основе миварных технологий [7] и способа автоматизированного построения маршрута логического вывода в миварной базе знаний с линейной вычислительной сложностью логического вывода на продукциях, который был впоследствии запатентован [8]. В данной статье представлена одна из реализаций интеллектуального принятия решения в концепции управления автомобилем.
Описание модели
Модель «Проезд перекрестка» выполнена в программе «Wi!Mi Разуматор - Демо» и предназначена для определения необходимого маневра на перекрестке исходя из входных параметров. Входными параметрами являются все данные, получаемые с помощью технического зрения и задание навигатора, требующего выполнить определенный маневр - поворот налево, поворот направо, разворот или движение прямо. Выходом модели является набор шагов, который необходимо предпринять в текущей ситуации для проезда перекрестка.
Логика работы модели такова, что в результате обязательно должно быть предпринято какое-либо действие, даже если оно не такое, как того требует навигатор. Это возможно в случае, если дорожная обстановка не позволяет выполнить предписание навигатора (например, необходимо повернуть налево, а знаки при этом разрешают движение только прямо).
Разработанная программа позволяет определить минимальный набор необходимых действий, которые требуется предпринять для успешного преодоления перекрестка.
Работа с программой
Для определения маневра при проезде перекрестка система должна вопспринять следующие поля (25 входных параметров):
Данные вводятся исходя из окружающей обстановки:
Данные, полученные при помощи технического зрения.
Знаки. Параметры, описывающие наличие дорожных знаков.
|
Название |
Описание |
Допустимые значения |
|
Главная дорога |
Определяет наличие знака главной дороги |
да/нет |
|
Второстепенная дорога |
Определяет наличие знака второстепенной дороги |
да/нет |
Таблица 1. Параметры, описывающие наличие дорожных знаков.
Знаки, относящиеся к передвижению вперед. Параметры, определяющие наличие запрещающих знаков при проезде прямо.
|
Название |
Описание |
Допустимые значения |
|
Въезд запрещен |
Определяет наличие знака «Въезд запрещен» |
да/нет |
|
Движение запрещено |
Определяет наличие знака «Движение запрещено» |
да/нет |
Таблица 2. Параметры, определяющие наличие запрещающих знаков при проезде прямо.
Знаки, относящиеся к повороту налево и для разворота.
Параметры, определяющие наличие запрещающих знаков при повороте налево или разворота.
|
Название |
Описание |
Допустимые значения |
|
Въезд запрещен |
Определяет наличие знака «Въезд запрещен» |
да/нет |
|
Движение запрещено |
Определяет наличие знака «Движение запрещено» |
да/нет |
|
Поворот налево запрещен |
Определяет наличие знака «Поворот налево запрещен» |
да/нет |
|
Разворот запрещен |
Определяет наличие знака «Разворот запрещен» |
да/нет |
Таблица 3. Параметры, определяющие наличие запрещающих знаков при повороте налево или разворота.
Знаки, относящиеся к повороту направо. Параметры, определяющие наличие запрещающих знаков при повороте направо.
|
Название |
Описание |
Допустимые значения |
|
Въезд запрещен |
Определяет наличие знака «Въезд запрещен» |
да/нет |
|
Движение запрещено |
Определяет наличие знака «Движение запрещено» |
да/нет |
|
Поворот направо запрещен |
Определяет наличие знака «Поворот направо запрещен» |
да/нет |
Таблица 4. Параметры, определяющие наличие запрещающих знаков при повороте направо.
Разметка.
Количество полос. Параметр, определяющий количество полос попутного направления.
|
Название |
Описание |
Допустимые значения |
|
Количество полос |
Определяет количество полос попутного направления |
целое неотрицательное число |
Таблица 5. Параметр, определяющий количество полос попутного направления.
Текущая полоса движения. Параметр, определяющий текущую полосу
|
Название |
Описание |
Допустимые значения |
|
Текущая полоса |
Определяет номер текущей полосы |
целое неотрицательное число, но не больше параметра «Количество полос» |
Таблица 6. Параметр, определяющий текущую полосу
Линия разметки. Параметр, определяющий линию разметки на дороге
|
Название |
Описание |
Допустимые значения |
|
Линия разметки |
Определяет линию разметки на дороге |
прерывистая/сплошная |
Таблица 7. Параметр, определяющий линию разметки на дороге
Светофор. Параметры, описывающие светофор на перекрестке.
|
Название |
Описание |
Допустимые значения |
|
Наличие светофора |
Определяет наличие светофора на перекрестке |
да/нет |
|
Наличие стрелки налево |
Определяет наличие стрелки на перекрестке |
да/нет |
|
Цвет светофора |
Определяет текущий свет светофора |
зеленый/красный |
|
Цвет стрелки светофора |
Определяет текущий свет стрелки светофора |
зеленый/красный |
Таблица 8. Параметры, описывающие светофор на перекрестке.
Статус пути. Параметры, описывающие доступность дорог во время выполнения маневра.
|
Название |
Описание |
Допустимые значения |
|
Путь слева свободен |
Определяет отсутствие помех с левой стороны |
да/нет |
|
Путь свободен |
Определяет отсутствие помех спереди |
да/нет |
|
Путь справа свободен |
Определяет отсутствие помех с правой стороны |
да/нет |
Таблица 9. Параметры, описывающие доступность дорог во время выполнения маневра.
Задание, получаемое с навигатора. Параметры, определяющие маневр, который необходимо выполнить на перекрестке.
|
Название |
Описание |
Допустимые значения |
|
Движение прямо на перекрестке |
Определяет направление движения - прямо |
да/нет |
|
Поворот налево на перекресток |
Определяет направление движения - налево |
да/нет |
|
Поворот направо на перекресток |
Определяет направление движения - направо |
да/нет |
|
Развернуться на перекресток |
Определяет направление движения - разворот |
да/нет |
Таблица 10. Параметры, определяющие маневр, который необходимо выполнить на перекрестке.
Промежуточные вычисляемые параметры на основе входных:
Вычисляемый блок.
Блок маневров для перестроения. Данный блок включает в себя параметры, которые описывают необходимое местоположение автомобиля на полосе, перед выполнением маневра.
|
Название |
Описание |
|
Перестроится в крайний левый ряд |
Определяется при повороте налево или развороте |
|
Перестроится в крайний правый ряд |
Определяется при повороте направо |
|
Проезд прямо |
Определяется при проезде перекрестка прямо |
Таблица 11. Блок маневров для перестроения.
Блок принятия решений. В данном блоке описывается влияние знаков и светофоров на действие, выполняемое автомобилем на перекрестке.
|
Название |
Описание |
|
Влияние знаков на движение при наличии светофора |
Определяется при влиянии знаков на движение при наличии светофора в зависимости от входных параметров в блоке «Знаки» |
|
Влияние знаков на движение при отсутствии светофора |
Определяется при влиянии знаков на движение при отсутствии светофора в зависимости от входных параметров в блоке «Знаки» |
|
Влияние светофора на движение |
Определяется при влиянии светофора на движение в зависимости от входных |
|
параметров в блоке «Светофор» |
|
|
Влияние стрелки светофора на поворот налево (разворот) |
Определяется при влиянии стрелки светофора на поворот или разворот в зависимости от входных параметров в блоке «Светофор» |
|
Поворотники |
Определяет активность включенных поворотников (является выходным параметром системы) |
Таблица 12. Блок принятия решений.
Определенная полоса. Блок определяет полосу текущего перемещения.
|
Название |
Описание |
|
Полоса |
Описывается полоса текущего перемещение в зависимости от входных параметром в блоке «Разметка» (является выходным параметром системы) |
Таблица 13. Определенная полоса.
Поворотники. Данный блок включает в себя параметры, которые описывают текущее состояние поворотников. Параметры разделены на два дочерних блока: Левый поворотник, Правый поворотник .
|
Название |
Описание |
|
Включенный левый поворотник |
Находится в блоке «Левый поворотник». Определяется при повороте налево в блоке «Задание, получаемое с навигатора» |
|
Выключенный левый поворотник |
Находится в блоке «Левый поворотник». Определяет начальное состояние левого поворотника перед выполнением маневра. |
|
Включенный правый поворотник |
Находится в блоке «Правый поворотник». Определяется при повороте направо в блоке «Задание, получаемое с навигатора» |
|
Выключенный правый поворотник |
Находится в блоке «Правый поворотник». Определяет начальное состояние правого поворотника перед выполнением маневра. |
Таблица 14. Поворотники.
Стоп линия. В данном блоке описываются параметры, определяющие дальнейшие действия, когда автомобиль подъехал к стоп-линии.
|
Название |
Описание |
|
Задание с учетом знаков |
Определяет дальнейшее направление движения, определенное исходя из знаков |
|
Полоса |
Определяет необходимую полосу для выполнения маневра из значения параметра «Задание с учетом знаков». |
|
Статус поворота налево |
Определяет, возможен ли поворот налево |
|
Статус пути |
Определяет доступность пути выбранном в «Задание с учетом знаков направлении» |
Таблица 15. Стоп-линия.
Выходные параметры:
Построение алгоритмов, для проезда перекрестка. Определяет конечное действие автомобиля на перекрестке.
|
Название |
Описание |
|
Маневр к выполнению |
Определяет конечное действие автомобиля с учетом всех входящих параметров, описанных в «Данные, полученные при помощи технического зрения» |
Таблица 16. Выходные параметры.
Выходные параметры определяются с помощью отношений и правил системы. Отношения - вид связи, использующий абстрактные переменные, описывающее их взаимодействие, а правило - это вид связи, привязывающий отношение к конкретным объектам. Для одного отношения может быть описано несколько правил.
В системе было создано 42 отношения и описано 59 правил:
|
Отношение |
Правила |
|
Определить дорожные знаки |
Определить знаки, влияющие на разворот (разворот запрещен) |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии (правый поворот) |
Выполнить предписание блока принятия решения (поворот направо) |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора 2 |
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора 2 |
|
NEW. Определение маневра налево при имеющейся стрелке |
NEW. Определние маневра при имеющейся стрелке |
|
Определение маневра (разворот на перекрестке) |
Определение маневра |
|
Определение маневра (поворот налево) |
Определение маневра |
|
Определить дорожные знаки |
Определить знаки, влияющие на движение вперед |
|
Определение маневра без светофора 2 |
Определение маневра без светофора |
|
Включить поворотники 1 |
Включить левый поворотник |
|
Включить правый поворотник |
|
|
Пересчет задания с учетом знаков для поворота направо |
Пересчет задания с учетом знаков для поворота направо (разрешенная полоса ) |
|
Пересчет задания с учетом знаков для поворота направо ( запрещенная полоса ) |
|
|
Продолжить движение по крайней левой полосе |
Продолжить движение по крайней левой полосе (поворот налево) |
|
Продолжить движение по крайней левой полосе (разворот) |
|
|
Перестроиться в крайний левый ряд |
Перестроиться в крайний левый ряд |
|
Перестроиться в крайний левый ряд |
|
|
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора главная дорога (поворот направо |
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора главная дорога (поворот направо) |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии 1 |
Выполнить предписание блока принятия решения |
|
Определение маневра без светофора 6 |
Определение маневра |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии (левый поворот) |
Выполнить предписание блока принятия решения (поворот налево) |
|
Пересчет задания с учетом знаков для передвижения прямо |
Пересчет задания с учетом знаков для передвижения прямо |
|
Определение маневра без светофора 7 |
Определение маневра |
|
Пересчет задания с учетом знаков для поворота налево |
Пересчет задания с учетом знаков для поворота налево (разрешенная полоса ) |
|
Пересчет задания с учетом знаков для поворота налево ( запрещенная полоса) |
|
|
Определение полосы при подъезде к стоп линии |
Определение полосы (прямо) |
|
Определение полосы (направо) |
|
|
Определение полосы (налево) |
|
|
Определить цвет светофора |
Определить цвет светофора |
|
Продолжить движение в текущей полосе |
Продолжить движение в текущей полосе |
|
NEW. Определение маневра без светофора 2 (с учетом стрелки) |
Определение маневра без светофора 2 (с учетом стрелки) |
|
NEW. Отсутствие светофора |
Отсутствие основного светофора |
|
Отсутствие стрелки |
|
Определение маневра без светофора 5 |
Определение маневра |
|
Определение маневра (поворот направо) |
Определение маневра |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора главная дорога (поворот налево) |
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора главная дорога (поворот налево) |
|
Выполнить предписание блока принятия решения при подъезде к стоп линии без светофора главная дорога (разворот) |
|
|
Определить полосу |
Определить полосу текущего перемещения |
|
Перестроиться в крайний правый ряд |
Перестроиться в крайний правый |
|
Определение маневра (движение прямо) |
Определение маневра |
|
NEW. Определение маневра разворота при имеющейся стрелке |
NEW. Определение маневра разворота при имеющейся стрелке |
|
Определение маневра без светофора 3 |
Определение маневра |
|
Статус дороги |
Определение статуса дороги |
|
Определение маневра без |
Определение маневра |
|
светофора 8 |
|
|
Пересчитать задание с учетом знаков для разворота |
Пересчитать задание с учетом знаков для разворота (запрещенная полоса) |
|
Пересчитать задание с учетом знаков для разворота (разрешенная полоса) |
|
|
Определить цвет стрелки светофора |
Определение цвета стрелки |
|
Влияние на поворот в зависимости от стрелки |
|
|
Определение маневра без светофора 1 |
Определение маневра |
|
Определить дорожные знаки |
Определить знаки, влияющие на поворот налево |
|
Определить знаки, влияющие на поворот направо |
|
|
Определение приоритета движения |
Определение приоритета движения (направо) |
|
Определение приоритета движения (вперед) |
|
|
Определение приоритета движения (налево) |
|
|
Определение приоритета движения |
|
(разворот) |
|
|
Определение маневра без светофора 4 |
Определение маневра |
|
Перестроиться направо |
Перестроение в крайний правый ряд |
|
Включить поворотники (определение поворотников в зависимости от запланированного движения) |
Включить левый поворотник (поворот) |
|
Включить левый поворотник (разворот) |
|
|
Включить правый поворотник |
Таблица 17. Отношения и правила.
Пример работы алгоритма на основе графа:
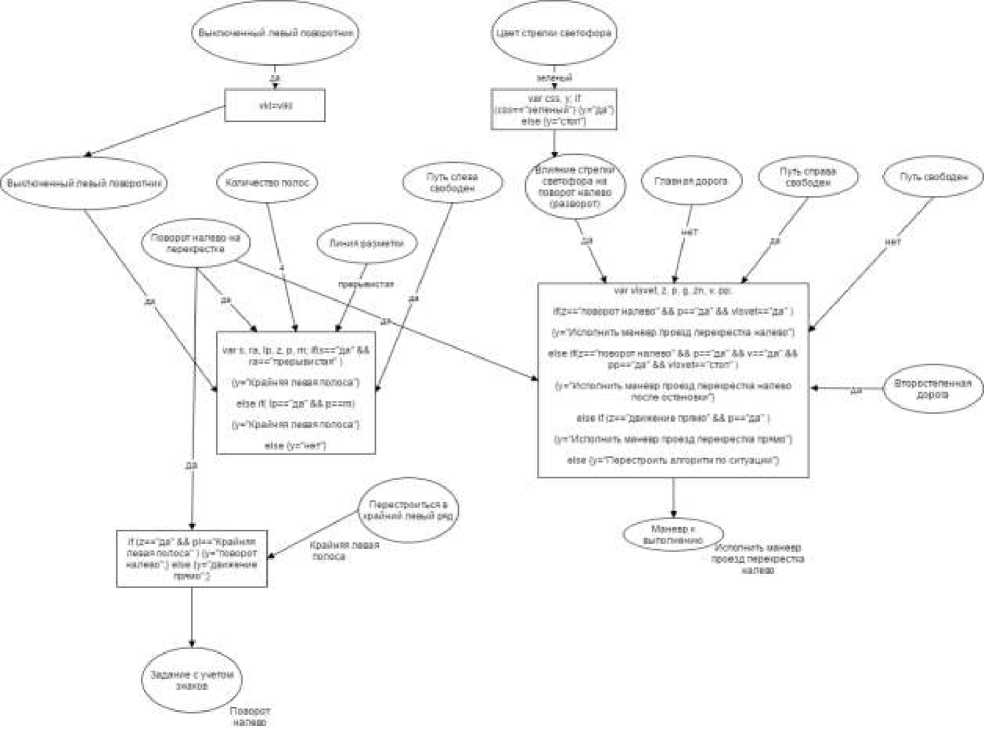
Рис. 1. Граф алгоритма
Как видно из графа алгоритма работы программы для приведенного примера, алгоритм использует 13 уникальных (не повторяющихся для различных шагов) входных параметров. 13 входных параметров обеспечивают 13! различных ситуаций или 6 227 020 800 вариантов комбинаций параметров, влияющих на исход ситуации.
Созданная модель проезда перекрестка позволяет учитывать предписывающие и запрещающие знаки для каждого из возможных направлений движения (суммарно 11 параметров), тип линии разметки, количество полос, текущую полосу движения, светофор и стрелку светофора, статус пути (возможность двигаться в каком-либо направлении вообще, без учета знаков и светофора) и задание с навигационной системы о дальнейшем направлении движения. Таким образом в системе можно задать 25 различных входных параметров, что позволяет задать 1,6х10^25 разных комбинаций входных параметров, позволяющих описать ситуацию на дороге. Предусмотреть такое количество заранее просчитанных ситуаций и поведенческих моделей невозможно, поиск по базе данных с таким количеством записей занимает несоизмеримо больше времени, чем прямой просчет ситуации исходя из заданных параметров и правил их расчета. Данный пример наглядно демонстрирует превосходство миварных систем поддержки принятия решений над классическими экспертными системами.
В настоящее время система автоматического управления от Google реализована на шести опытных автомобилях Toyota Prius, Lexus RX 450h и Audi TT, которые проехали в беспилотном режиме несколько миллионов километров. Для реализации функций автоматического управления система включает в себя следующие входные устройства: лидар, радары, видеокамера, датчик оценки положения, инерционный датчик движения, GPS приемник.
Для решения задач, рассмотренных в статье, видеокамера определяет сигналы светофора и позволяет блоку управления распознавать движущиеся объекты, в т.ч. пешеходов и велосипедистов. Видеокамера располагается на лобовом стекле за зеркалом заднего вида.
Сигналы от входных устройств передаются в электронный блок управления, где производится их обработка в соответствии с заложенной программой и формирование управляющих воздействий на исполнительные устройства.
В рамках проекта HAVit (Highly Automated Vehicles for Intelligent Transport – Высоко автоматизированные автомобили для интеллектуального транспорта) в 2011 году была представлена полуавтоматическая система
Temporary Auto Pilot , TAP (Временный автопилот). Система позволяет водителю в определенных условиях отдать управление автомобилем под контроль автоматики. По своей сути система является промежуточным этапом на пути к роботизированному автомобилю.
Как видно из графа алгоритма работы программы для приведенного примера, алгоритм использует 13 уникальных (не повторяющихся для различных шагов) входных параметров. 13 входных параметров обеспечивают 13! различных ситуаций или 6 227 020 800 вариантов комбинаций параметров, влияющих на исход ситуации.
Созданная модель проезда перекрестка позволяет учитывать предписывающие и запрещающие знаки для каждого из возможных направлений движения (суммарно 11 параметров), тип линии разметки, количество полос, текущую полосу движения, светофор и стрелку светофора, статус пути (возможность двигаться в каком-либо направлении вообще, без учета знаков и светофора) и задание с навигационной системы о дальнейшем направлении движения. Таким образом в системе можно задать 25 различных входных параметров, что позволяет задать 1,6х10^25 разных комбинаций входных параметров, позволяющих описать ситуацию на дороге. Предусмотреть такое количество заранее просчитанных ситуаций и поведенческих моделей невозможно, поиск по базе данных с таким количеством записей занимает несоизмеримо больше времени, чем прямой просчет ситуации исходя из заданных параметров и правил их расчета. Данный пример наглядно демонстрирует превосходство миварных систем поддержки принятия решений над классическими экспертными системами.
Миварные сети позволяют организовать и развить продукционный подход и создать автоматически обучающуюся интеллектуальную систему. Разработанная система поддержки принятия решения при проезде перекрестка стала одним из вариантов решения актуальной задачи искусственного интеллекта, что доказывает перспективу миварного подхода для разработки современных интеллектуальных систем.
Список литературы Система поддержки принятия решения при проезде перекрестка
- Язык запросов к миварному представлению реляционных баз данных, содержащих архив информации из предыдущих кадровых систем http://engjournal.ru/articles/1053/1053.pdf
- Фадин А.М., Иванов А.М., Шадрин С.С. Методика оценки алгоритмов управления автомобилем в автоматическом режиме // Вестник МАДИ. 2013. Вып. 3(34). С. 3-7.
- Иванов А.М., Шадрин С.С. Обоснование выбора ключевых технологий функционирования системы межобъектного взаимодействия интеллектуальных транспортных средств при движении по скоростным автомагистралям // Вестник МАДИ. 2013. Вып. 1(32). С. 7-13.
- Шадрин С.С., Иванов А.М., Невзоров Д.В. Автономное колесное транспортное средство в составе интеллектуальных транспортных систем // Естественные и технические науки. 2015. Вып. 6(84). С. 309-311.
- Шадрин С.С. Методология создания систем управления движением автономных колесных транспортных средств, интегрированных в интеллектуальную транспортную среду // Автореферат диссертации на соискание ученой степени доктора технических наук. - Москва, 2017. - 34 с.
- Давыдова Т.Л., Варламов О.О., Остроух А.В., Краснянский М.Н. Анализ возможностей миварного подхода для систем искусственного интеллекта и современной робототехники // Вестник Тамбовского государственного технического университета. 2011. Т. 17. № 3. С. 687-694.
- Варламов О.О., Лазарев В.М., Чувиков Д.А., Джха Пунам. О перспективах создания автономных интеллектуальных роботов на основе миварных технологий // Радиопромышленность. 2016. № 4. С. 96-105.
- Варламов О.О., Хадиев А.М., Чибирова М.О., Сергушин Г.С., Антонов П.Д. Автоматизированное построение маршрута логического вывода в миварной базе знаний // Патент на изобретение RUS 2607995 11.02.2015.
