Система посадки по сигналам псевдоспутников

Автор: Нигруца Игорь Владимирович, Гребенников Андрей Владимирович, Казанцев Михаил Юрьевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 (41), 2012 года.
Бесплатный доступ
Предложена и исследована методика применения локальной радионавигационной системы для обеспечения посадки воздушных судов, позволяющая подходить к решению вопросов топогеодезического обеспечения, гарантирующая их решение даже в условиях активного противодействия.
Псевдоспутник, посадка летательного аппарата, глонасс/gps
Короткий адрес: https://sciup.org/148176781
IDR: 148176781 | УДК: 527.8
Aircraft landing system bases on pseudo satellites signals
The authors present and investigate a method, based on the use of local radio-navigation system, providing landing of aircraft, and making it possible to solve problems of topo-geodesic control, ensuring guaranteed solution of these problems even in conditions of active thrust.
Текст научной статьи Система посадки по сигналам псевдоспутников
Применение глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС и GPS для посадки воздушных судов (ВС) ограничено несколькими факторами:
-
– достаточно высокой погрешностью определения координат и скорости ВС (от 1–2 до 6–10 м);
-
– низкой помехоустойчивостью навигационного оборудования, работающего по сигналам ГЛОНАСС и GPS.
Применение псевдоспутников (ПС), в системах посадки ВС позволяет решить проблему относительно высокой погрешности навигационных определений, а также повысить помехоустойчивость в условиях активного противодействия [1].
Здесь представлены результаты работы над созданием системы посадки ВС, выполненные в ФГУП «ГНПП «Радиосвязь» и Сибирском федеральном университете по заданию ООО «ВедаПроект», НПФ «Спектр» и концерна ПВО «Алмаз-Антей» [2].
Для обеспечения совместимости навигационного оборудования были использованы сигналы, аналогичные сигналам ГНСС. Разработанный ПС имеет выход на излучающую антенну для диапазона 1,2 ГГц (L2 GPS).
Уменьшение погрешности навигационных определений по сигналам ПС, по сравнению с ГНСС, до 0,05–0,1 м было достигнуто за счет отсутствия у ПС погрешностей, обусловленых распространением сигнала в ионосфере и тропосфере, а также эфемеридных погрешностей (псевдоспутники находятся в состоянии покоя в заранее известных координатах).
В состав системы посадки ВС на основе ПС (рис. 1) входит контрольно-корректирующая станция (ККС) и псевдоспутники. ККС должна обеспечивать проверку сигнала, излучаемого ПС, и синхронизацию шкалы времени ПС.
В процессе выполнения работы был разработан состав и формат оперативной информации (ОИ) навигационного сообщения ПС. ОИ ПС состоит из ин- формации, собранной из пяти строк оперативной информации (ОИ) навигационного сообщения ПС ГЛОНАСС (рис. 2).
Каждая строки ОИ ПС ГЛОНАСС включает код Хемминга (8 бит). Передача ЦИ от ПС для потребителя осуществляется старшими разрядами вперед (рис. 3–7).
Обозначения всех параметров, их размер, цена младшего разряда, диапазон значений соответствуют ИКД ГЛОНАСС (редакция 5.1), за исключением параметров, приведенных в таблице.
Параметры с диапозоном значений, не соответствующим ИКД ГЛОНАСС
|
Слово |
Число разрядов |
Цена младшего разряда |
Диапазон значений |
Единица измерения |
|
t b |
32 |
1 |
0...4294967295 |
с |
|
Y n ( t b ) |
18 |
2-40 « I 1^10 1 ’ |
± 2-23 « I 1-10 ' |
безразмерная |
|
x n ( t b ), y n ( t b ), z n ( t b ) |
31 |
2-15 « । 3^10 5 |
± 3,2^10 4 |
км |
|
Информация строки 1 ОИ ПС (10 байт) |
КХ |
|
Информация строки 2 ОИ ПС (10 байт) |
КХ |
|
Информация строки 3 ОИ ПС (10 байт) |
КХ |
|
Информация строки 4 ОИ ПС (10 байт) |
КХ |
|
Информация строки 5 ОИ ПС (10 байт) |
КХ |
Рис. 2. Формат оперативной информации навигационного сообщения ПС ГЛОНАСС
|
1 |
2 |
3 |
||||||
|
1 |
2 |
3 4 5 |
67 8 |
1 |
2345678 |
123 4 5 |
6 78 |
|
|
1 |
m (4 bits) |
x ( t b ) (LSBs) |
tk (12 bits) |
5c ( tb ) ( MSBs) |
||||
|
2 |
x ( t b ) (LSBs) (21 bits) |
x ( tb ) ( MSBs) |
||||||
|
3 |
x ( tb ) |
x ( t b ) (MSBs) (19 bits) |
||||||
|
4 |
x ( t b ) (MSBs) (8 bits) |
|||||||
Рис. 3. Формат данных из строки 1 оперативной информации навигационного сообщения ПС
|
1 |
2 |
3 |
|||||||
|
1 |
2 |
3 4 5 |
67 8 |
1 |
2345678 |
123 4 |
5 |
6 78 |
|
|
1 |
m (4 bits) |
Bn (3 bits) |
tb (MSBs) (7 bits) |
y ( t b ) (LSBs) |
y ( tb ) ( MSBs) |
||||
|
2 |
y ( t b ) (LSBs) (21 bits) |
y ( tb ) ( MSBs) |
|||||||
|
3 |
y ( t b ) |
y ( tb ) (MSBs) (19 bits) |
|||||||
4 y ( t b ) (MSBs) (8 bits)
Рис. 4. Формат данных из строки 2 оперативной информации навигационного сообщения ПС
|
1 |
2 |
3 |
||||||||||
|
1 |
2 3 4 5 |
6 |
7 8 |
1 2345678 |
1 |
2 |
3 |
4 |
5 |
6 78 |
||
|
1 |
m (4 bits) |
Y n ( t b ) (LSBs) (11 bits) |
z ( t b ) (LSBs) |
z ( tb ) ( MSBs) |
||||||||
|
2 |
z ( tb ) (LSBs) (21 bits) |
z ( tb ) ( MSBs) |
||||||||||
|
3 |
z ( t b ) |
z ( t b ) (MSBs) (19 bits) |
||||||||||
|
4 |
z ( t b ) (MSBs) (8 bits) |
|||||||||||
Рис. 5. Формат данных из строки 3 оперативной информации навигационного сообщения ПС
|
1 |
2 |
3 |
||||||||
|
1 |
2 |
3 |
4 5 |
67 8 |
1 |
23 |
45678 |
123 4 5 6 |
78 |
|
|
1 |
m (4 bits) |
T n ( tb ) (LSBs) (19 bits) |
||||||||
|
2 |
T n ( t b |
) |
v(tb ) (5 bits) |
tb (LSBs) (25 bits) |
||||||
|
3 |
tb (LSBs) (25 bits) |
N T |
n |
|||||||
4 n (LSBs)
Рис. 6. Формат данных из строки 4 оперативной информации навигационного сообщения ПС
|
1 |
2 |
3 |
||||
|
1 |
2 3 4 5 |
67 8 |
1 2345 |
678 |
123 4 5 6 78 |
|
|
1 |
m (4 bits) |
NA (11 bits) |
τ c MSBs (8 bits) |
|||
|
2 |
τ c (24 bits) |
|||||
|
3 |
N 4 Y n ( tb ) (MSBs) (7 bits) |
T n ( tb ) (MSBs) (14 bits) |
||||
-
4 Tn (tb )
Рис. 7. Формат данных из строки 5 оперативной информации навигационного сообщения ПС
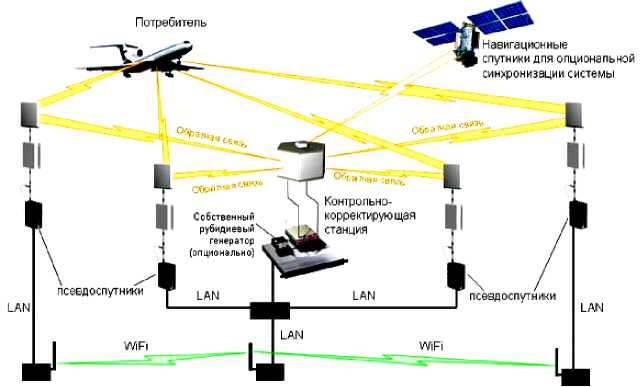
Рис. 1. Структура системы посадки ВС
Разработанная локальная радионавигационная система навигации (ЛРНС) при посадке обеспечивает, в случае необходимости, смену маршрута из-за возникших обстоятельств, свободу в выборе траектории приближения к полосе. ВС направляются сигналами ПС, указывающими пилоту последовательность точек в трехмерном пространстве, через которые можно пойти на снижение [3].
Технология проектирования и практической реализации ЛРНС на сегодняшний день уже отработана, что позволяет применять ее для решения различных задач. Одной из наиболее перспективных и очевидных сфер применения ЛРНС является обеспечение посадки воздушных судов в условиях сложной помеховой обстановки, в том числе в условиях активного противодействия [4].
Использование для работы ПС сигналов систем ГЛОНАСС и GPS позволяет применять приемники сигналов данных СРНС c минимальной доработкой.
Процесс следования по маршруту прибытия для захода на посадку предполагает знание пилотом критериев пролета препятствий, выдерживания ограни- чений по скорости, угла крена и других параметров, которые свойственны каждому участку [5].
Применение ПС для точного захода на посадку позволяет [6]:
-
1. Увеличить точность позиционирования до единиц метров, по сравнению со спутниковыми радионавигационными системами, за счет отсутствия у наземных станций эфемеридных и ионосферных погрешностей;
-
2. Увеличить мощность сигнала, что позволяет повысить устойчивость к средствам РЭБ;
-
3. Работать независимо от СРНС.
Пространственное разделение передающий антенны и передатчика позволяет сохранить ПС при уничтожении антенны.
За счет относительно невысокой стоимости имеется возможность создать группировки с большим количеством ПС, что сделает ее уничтожение экономически нецелесообразным.
Определение координат по сигналам ПС основано на измерении псевдодальностей. Взаимосвязь между измеряемыми и оцениваемыми параметрами определяется следующей системой уравнений:
ri = V( xci - x)2 +(Уа - У )2 +(zu - z)2 + с ■Ат, (1)
где ri – измеренная псевдодальность до i -го ПС; Ат - расхождение шкалы времени приемной аппаратуры и шкалой времени ПС; с – скорость света; x , y , z – координаты ЛА; xсi , yсi , zсi – координаты ПС; n - число наблюдаемых ПС; i = 1, n .
Данная система уравнений является нелинейной, ее решение сводится к решению эквивалентной задачи поиска экстремума функции:
n
J ( x, у , z ) = X ft ( x, у , z )2 ^ min, (2)
,=1 x,y, z где fi- (x, У, z ) =
= r - V(xci — x)2 + (Ус — У )2 + (zci — z)2 + с ^Ат
В данном случае, точка, где достигается минимум функции, соответствует решению уравнения (1). В силу специфики решения задачи определения координат ЛА при заходе на посадку все ПС оказываются расположенными, практически, в одной плоскости.
Поэтому при решении задачи минимизации функции (2) могут возникнуть проблемы со сходимостью, связанные с влиянием геометрии расположения ПС. В данном случае, выбор метода решения уравнения (2) является одним из важных составляющих процесса обработки информации в системе посадки ЛА.
При создании ЛРНС псевдоспутники могут устанавливаться в точках с известными координатами, например, на пунктах Государственной геодезической сети (ГГС) и объединяться в сети. Наиболее перспективными являются MESH-сети, способные работать не только по схеме точка-точка, но и самоорганизо-вываться в интеллектуальную структуру, использующую каждый элемент сети для адресной ретрансляции данных. Таким образом, появляется возможность оперативного воздействия на все элементы системы, что позволяет разрабатывать и реализовывать огромное разнообразие алгоритмов управления.
Цель разработки данного прототипа не только в обеспечении посадки воздушных судов на ВПП, а также в использовании системы в условиях необорудованных ВПП, вертолетных площадок, авианосцев. Точность, универсальность и мобильность подобных ЛРНС позволяет обеспечить безопасность при заходе на посадку в месте развертывания.
