Система термостатирования авиационного оборудования на основе самовакуумирующейся вихревой трубы с автоматическим регулированием параметров диффузора

Автор: Алексеенко В.П., Дорофеева Т.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3 т.9, 2007 года.
Бесплатный доступ
В статье произведен расчет характеристик вихревой системы термостатирования с автоматичес- ким регулированием параметров диффузора на основе самовакуумирующейся вихревой трубы.
Короткий адрес: https://sciup.org/148198004
IDR: 148198004 | УДК: 629.7.05(075)
Тermostabilization avionics vortical system with nozzle automatic control parametres based on selfvacuum vortex tube
Тhе calculation of termostabilization vortical system characteristics with nozzle automatic control parametres based on selfvacuum vortex tube.
Текст научной статьи Система термостатирования авиационного оборудования на основе самовакуумирующейся вихревой трубы с автоматическим регулированием параметров диффузора
-
1 Поволжское отделение секции прикладных проблем РАН, г. Самара 2 Самарский государственный аэрокосмический университет
В статье произведен расчет характеристик вихревой системы термостатирования с автоматическим регулированием параметров диффузора на основе самовакуумирующейся вихревой трубы.
Вихревые системы термостатирования (ВСТ) просты по конструкции, надежны в эксплуатации и имеют высокий ресурс работы по сравнению с другими системами принудительного охлаждения. Существенным недостатком ВСТ является ограниченный диапазон их использования. Это связано с неизменным значением геометрических параметров ВСТ.
Существенно повысить эффективность работы ВСТ позволяет использование автоматического регулирования параметров ВСТ в зависимости от параметров набегающего потока. В результате ВСТ обеспечит достаточно стабильную температуру стержня в широком диапазоне условий и режимов полета летательного аппарата.
Рис. 1. Структурная схема ВСТ с автоматическим регулированием параметров диффузора:
1 – сопловой ввод; 2 – улитка; 3 – цилиндрический стержень; 4 – регулируемая стенка диффузора;
5 – диффузор
Одним из вариантов автоматического регулирования параметров ВСТ является изменение геометрических параметров диффузора с помощью перемещающейся задней стенки диффузора.
Система автоматического регулирования представляет собой сложный комплекс устройств и приборов, включающий измерители параметров объекта регулирования, усилители, сумматоры, фильтры, преобразователи, программные и исполнительные устройства. Система регулирования вырабатывает управляющий фактор, подаваемый в исполнительное устройство и изменяющий геометрические параметры диффузора.
Регулируемым параметром объекта управления является температура Тст цилиндрического стержня, расположенного на оси СВТ.
На рис. 1. показан вариант функциональной схемы ВСТ на основе самовакууми-рующейся вихревой трубы с автоматическим регулированием параметров диффузора.
Система содержит “улитку” 2 с воздухозаборником 1. Из “улитки” закрученный поток поступает в камеру энергетического разделения СВТ, в которой за счет сложных вихревых процессов происходит разделение потока на периферийную – горячую и осевую – холодную составляющие. Осевой холодный поток охлаждает цилиндрический стержень 3, подмешивается к периферийному горячему потоку и с осредненной температурой через зазор в диффузоре 5 выводится за пределы СВТ. Температура стержня замеряется датчиком температуры, выход которого соединен через усилитель с исполнительным устройством, перемещающим стен ку диффузора 4.
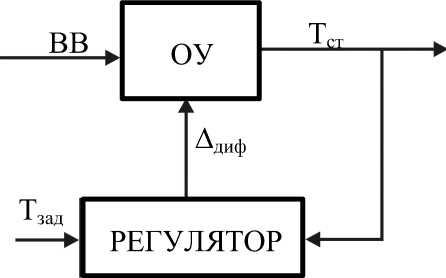
Рис. 2. Функциональная схема замкнутого типа
ВСТ с автоматическим регулированием параметров диффузора относится к системам замкнутого типа, непрямого действия, рис. 2.
Регулируемым параметром является температура стержня.
Функциональная схема ВСТ на основе са-мовакуумирующейся вихревой трубы с автоматическим регулированием параметров диффузора представлена на рис. 3. Она включает:
-
- обобщенный объект управления (ОУ), состоящий из СВТ и цилиндрического стержня;
-
- измерительное устройство (Изм. У), которым является датчик температуры, замеряющий температуру стержня;
-
- усилительное устройство (У), в качестве которого используются усилители по напряжению и мощности (магнитный усилитель);
-
- исполнительное устройство (ИУ), состоящее из исполнительного механизма и исполнительного органа.
В качестве исполнительного механизма можно использовать электродвигатель с редук- тором, обеспечивающие требуемые скорость и диапазон перемещения задней стенки диффузора. Исполнительным органом является задняя стенка диффузора, перемещение которой изменяет параметры диффузора.
Динамические свойства системы в целом и отдельных её элементов можно описать посредством передаточных функций.Струк-турная схема рассматриваемого устройства представлена на рис. 4.
В качестве датчика температуры используется терморезистор. Динамические свойства датчика температуры могут быть представлены коэффициентом усиления kдт. Значения постоянной времени Тдт находятся в интервале 1..3 с.
Динамические свойства усилителя отражены на схеме коэффициентом передачи kу.
Передаточная функция магнитного усилителя представлена передаточной функцией апериодического звена и описывается уравнением:
AU ум (p) _ , кум ум^" AU(p) - (ТумР+ 1)• W где Тум – постоянная времени авиационных магнитных усилителей. Тум= 0,01…0,5с;
kум – коэффициент усиления по мощности, может иметь порядок нескольких тысяч единиц.
Динамические свойства электродвигателя совместно с редуктором, когда в качестве выходного сигнала принимается перемещение на выходе редуктора, описываются передаточной функцией:
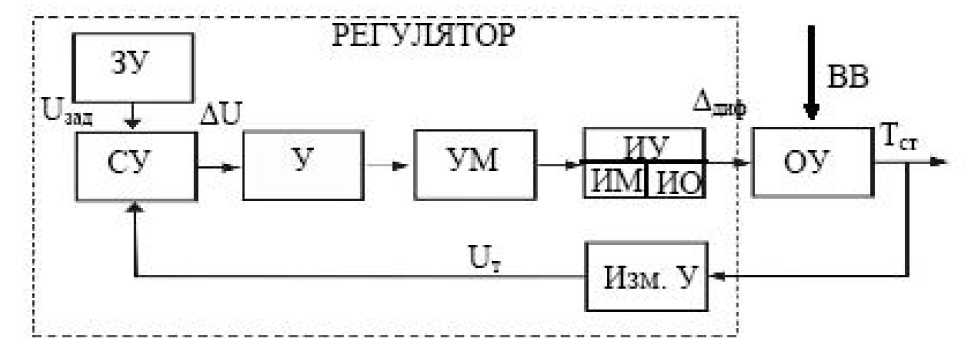
Рис. 3. Функциональная схема ВСТ с автоматическим регулированием параметров диффузора
U зад (р)
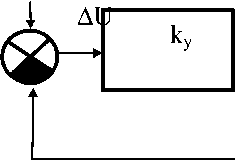
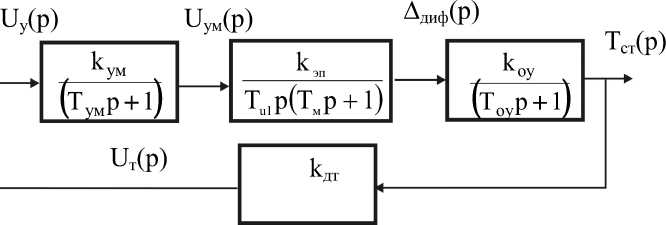
Рис. 4. Структурная схема ВСТ с автоматическим регулированием параметров диффузора
AX (р ) кд эп Аиум(Р) ipP -(Тм • ТэР2 + ТмР + 1), (2)
где kд – коэффициент передачи двигателя;
ip– передаточное отношение редуктора;
Тм, Тэ– электромеханическая и электромагнитная постоянные времени электродвигателя соответственно.
Из-за малого значения индуктивности электромагнитная постоянная времени значительно меньше электромеханической постоянной времени (Тэ<< Тм). Учитывая это, передаточную функцию электропривода можно записать в виде последовательного соединения апериодического и интегрирующего звеньев:
W (р ) = Ax(р) =______1______ эп AU у., (р) Тир -(ТмР + 1) - (3)
где Tu – постоянная времени, вычисляемая по формуле: Тu = кд/ip.
Динамические свойства объединенного объекта управления, когда выходным сигналом является изменение температуры DТ стержня, а входным – перемещение стенки диффузора, можно описать передаточной функцией апериодического звена:
АТ (р) _ , коу _ оу^"дХ ( р) ■ ( ТО у Р + 1 ) - (4)
где kоу – коэффициент передачи ОУ;
Тоу–постоянные времени ОУ.
При проведении анализа устойчивости система автоматического управления (САУ) стабилизации температуры стержня в приборном отсеке может рассматриваться как САУ замкнутого типа.
Для анализа устойчивости рассматриваемой САУ воспользуемся методом логарифмических частотных характеристик.
Передаточная функция САУ с учетом выше изложенного имеет вид:
ку • кум • коу • кдт р " Тир(Тоур + 1)-Тт,р + 1)-(Тумр +1). (5)
Преобразуем выражение 5 к виду удобному для дальнейшего анализа:
W ( р ) = Т и1 Р -( Т оу р + 1 ) -( Т , р + 1 ) -( Т ум р + 1 ) - (6) где Тu1 – эквивалентная постоянная времени системы.
T u1
Т
u
к • к • к • к .
у ум оу дт
Требуемое значение Тu в разработанной САУ обеспечивается выбором соответствующего значения коэффициента kу усиления усилителя 234.
Значения постоянных времени, входящих в выражение 4.6 приняты по результатам теоретических и экспериментальных исследований: Тоу = 6 с, Тм = 0,1 с, Тум = 0,05 с.
Исходное значение Тu1 примем равным 1с.
Для построения логарифмических частотных характеристик исходной системы определены значения частоты:
® си1 = = 1 рад/с;
Тu1
lg®cu1 = 0 Дек и частот сопряжения апериодических звеньев:
® с0 =
Тоу
= 0,166 рад/с;
® с1 = = 10 рад/с;
Тм
® с2 = 1- = 20 рад/с;
ум
1д®с0 = - 0,78 дек;
1д®с1 = 1 дек;
1д®с2 = 1,3 дек.
L(ω),
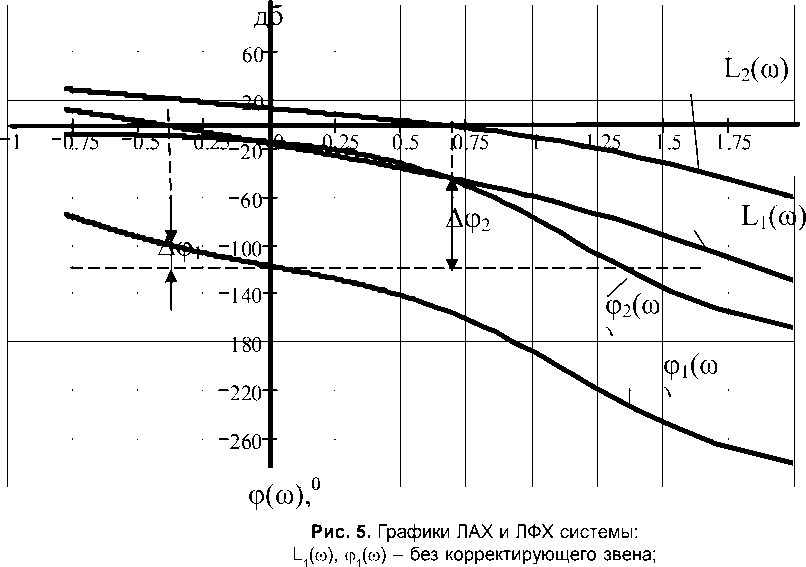
L 2 ( w ), ф 2( ю ) - с корректирующим звеном.
ln(ω), дб
Логарифмическая амплитудная характеристика (ЛАХ) и логарифмическая фазовая характеристика (ЛФХ) вычисляется по расчетным формулам:
-
- для ЛАХ:
L ( ш ) = 20lgk - 20lg д/( 1 + Т . н ) -
- 20lgV ( 1 + Т . ш ) - 20lgд/ ( 1 + 'Кт ) -
-
— 20lgT ui ®
-
- для ЛФХ:
-
Ф 1 ( ш ) = - arctgToy • ш - arctgTM • ш -
-
- arctgT yM • ш - T2 1 . (8)
Расчет характеристик производился с использованием ЭВМ.
Графики логарифмической амплитудной и логарифмической фазовой характеристик, построенные по результатам расчета на ЭВМ, представлены на рис. 5.
Анализ характеристик показывает, что данная система автоматического регулирования параметров диффузора устойчива. Однако запас по фазе Dц1 составляет менее 20%, что считается недостаточным при изменении входных параметров в широком диапазоне изменения высотно-скоростых характеристик летательного аппарата. Кроме того, система имеет малую полосу пропускания, что свидетельствует о ее невысоком быстродействии. Для повышения устойчивости и быстродействия системы необходимо провести коррекцию САУ.
В современных САУ для достижения максимального быстродействия системы с учетом ограничения на полосу пропускания используют стандартные настройки. В данном случае используем настройку на модульный оптимум. При такой настройке передаточная функция будет иметь вид:
W1 (р )= 2Тцр • < Тир + 1 ) , (9) где Тm– “малая “ некомпенсированная постоянная времени.
При настройке на модульный оптимум постоянную интегрирующего преобразования Тu2 выбирают в два раза больше “малой “ некомпенсированной постоянной времени Тm. Некомпенсированную постоянную времени следует выдирать равной Tm = 1/wс1, тогда:
Тu2 = 2Tm = 0,2 c.
В качестве корректирующего звена, вве-
(R1(V,H,p, p ...)
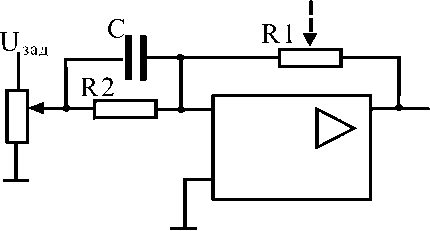
Рис. 6. Принципиальная схема корректирующего устройства
четным формулам:
- для ЛАХ:
L 2 ( ® ) = 20lgk - 20lg 7 ( 1 + T m 2®2 ) -- 20lg 7 ( 1 + Т ум 2®2 ) —
— 20lgT u2 ®
- для ЛФХ:
денного в систему, используется пропорционально- дифференцирующее звено (рис. 6).
Передаточная функция корректирующе го звена имеет вид:
WKOP (P) = ккор -(ТкорР + 1), (10)
где kкор – коэффициент передачи;
^ 2 ( rn ) = - arctgT M • ® - - arctgTy M • ® - ^2 2
k
кор
R 2
R 1 ,
ЛАХ L1(w), построенная при новом значении постоянной интегрирующего преобразования Тu2 приведена на рис. 5.
Анализ ЛФХ L1(w), приведенный на рис. 5, показывает, что запас по фазе равен 70%, что говорит о высоком быстродействии системы и возможности её эффективного использования в
процессе эксплуатации.
Произведем оценку показателей качества
Ткор – постоянная времени;
Т кор = C 1 • R 1 .
Постоянная времени корректирующего устройства принимается равной постоянной времени объекта управления: Ткор = Тоу.
Структурная схема САЧ с корректирующим звеном представлена на рис. 7.
Передаточная функция системы с учетом корректирующего звена имеет вид:
переходного процесса, достигаемого в скорре-тированной САУ, с помощью метода, базирующегося на обратном преобразовании Лапласа.
Передаточная функция замкнутой системы относительно задающего воздействия
Uзад описывается выражением:
W, (p)=
W kop ( P ) ' W yM ( P ) ' W ,n ( P ) ' W oy W ----------1 + W ( p ) •(12)
Wc ( P ) = W KOP ( P ) • W ( P ) =
= 1
" T u2 P . ( T m P + 1 ) - ( TyMP + 1 ) .
После преобразований с учетом передаточных функций отдельных звеньев выражение (12) примет вид:
Логарифмическая амплитудная характеристика (ЛАХ) и логарифмическая фазовая характеристика (ЛФХ) вычисляется по рас-
W3 ( P ) к дт T u 2 P ' ( T m P + 1 ) - ( гу м Р + 1 ) + 1 • (13)
Обозначим полином знаменателя в выражении 4.13 как D(p) и запишем его в стандартной форме:
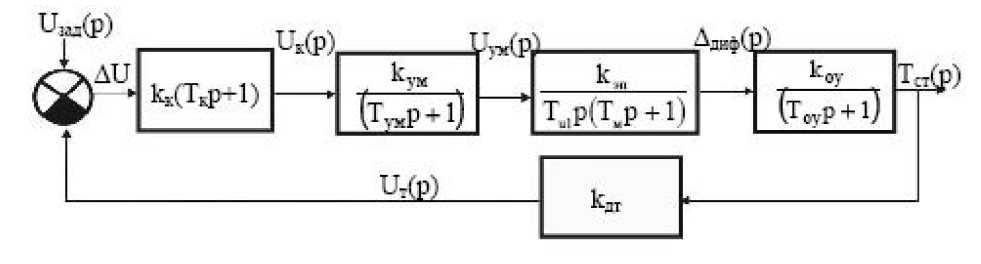
Рис. 7. Структурная схема САУ с корректирующим устройством
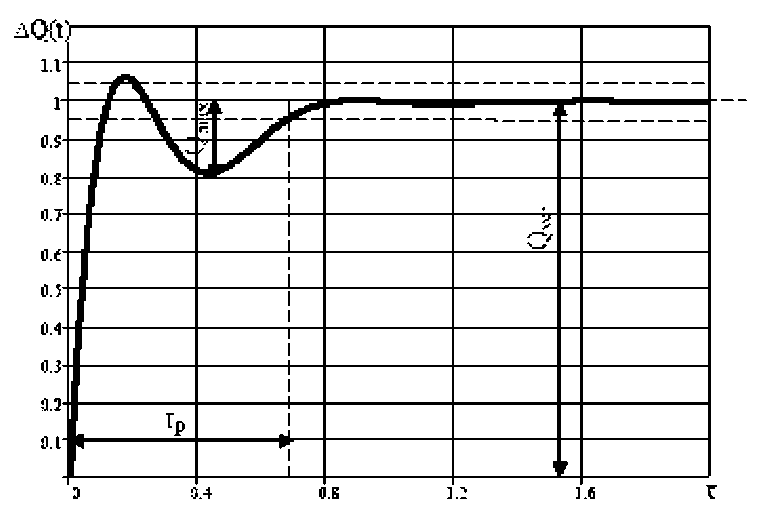
Рис. 8. Переходная характеристика САУ с корректирующим звеном
D(p) = a0 • p3 + a1 • p2 + a2 • p + a3;(14)
Полином содержит пару комплексных сопряженных корней с отрицательной вещественной частью: P 12 =- a i ± jP i ; и отРицательный вещественный корень: p3 — - a3.
Это позволяет выражение 4.13 привести к виду:
D ( p ) = ( t2P2 + 2^p + 1 ) - ( T 1 P + 1 ) , (15)
Лапласа находится оригинал, соответствующий изображение функции 15. В результате получает аналитическое выражение, описывающее переходный процесс.
AQ ( t ) = ^ . [ 1 - C • e - Yt • sin ( Xt - Q ) - C , ^ ], (18) дт
X• VT2 .(1 -2П1) + T12 ’ где T XFTpF; ^=-a1T;
C. =
T =
α 3 .
T 12 ;
(1 - 2YY1 )• T2 + T12;
Q = arctg
В результате подстановки полученных значений в выражение 13 передаточная функция системы примет вид:
λT1
1 - YT1
- arctg
λ
; γ
W3 ( p ) k gm ( T2p2 + 2 ^ pT + 1 ) . ( T 1 p + 1 ) . (16)
Умножим правую часть выражения на изображение скачка задающего сигнала А Ц/р, получим изображение выходной переменной для переходного процесса по управляющему воздействию:
Y = ^X->-Y ;
TT
Для общности расчета величина DUзад/kдт принята равной 1.
Расчет переходной характеристики регу-
ΔU 1
AQ ( P ) = зад . (17)
к дт p .( T p + 2 ^ pt + 1MT 1 p + 1 )
По таблицам обратных преобразований
лятора производилась с использованием ЭВМ. Переходная характеристика представлен на рис. 8.
Время регулирования для 5% зоны допустимых отклонений составляет:
tp = 0,68 c, перерегулирование:
ΔQ
о = • 100% = 18%.
ΔQ уст
Таким образом, в скорректированной системе обеспечивается достаточно высокое качество процесса регулирования, следовательно, данная система автоматического регулирования параметров диффузора может использоваться в широком диапазоне изменения высотно-скоростных характеристик летательного аппарата.
Список литературы Система термостатирования авиационного оборудования на основе самовакуумирующейся вихревой трубы с автоматическим регулированием параметров диффузора
- Алексеенко В.П., Бирюк В.В., Леонович Г.И., Лукачев С.В. Вихревые системы термостатирования//Самарский научный центр РАН. 2005
- Меркулов А.П. Вихревой эффект и его применение в технике. Самара, 1997.
- Пиралишвили Ш.А., Поляев В.М. Вихревой эффект. Эксперимент, теория, технические решения. М. УНПЦ"Энергия", 2000.
- Бирюк В.В. Применение вихревого эффекта разделения газов в конверсионных разработках. Материалы Всероссийской НПК. Самара: СГАУ, 1994.
- Бирюк В.В. Вихревая регенеративная установка//Некоторые вопросы исследования вихревого эффекта и его промышленное применеие. Труды 1-й ВНТК. Куйбышев: КуАИ, 1974.
- Серебряков Р.А., Бирюк В.В. Вихревой эффект энергетического разделения газов в системах охлаждения и кондиционирования//Вестник МАИ. 1994. №10.
