Система управления и процессы двухобъемного пневмоамортизатора

Автор: Хамитов Рустам Нуриманович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 (27), 2010 года.
Бесплатный доступ
Построена и исследована модель, описывающая рабочие процессы в двухобъемном пневмоамортизаторе и динамику амортизируемого объекта. Она позволяет провести анализ и выявить основные закономерности и особенности в работе как самих пневмоамортизаторов, так и управляемых клапанных устройств при различных режимах работы пневмоамортизатора.
Режим работы пневмоамортизатора, кратковременная коммутация объемов, демпфирование колебаний
Короткий адрес: https://sciup.org/148176113
IDR: 148176113 | УДК: 62.567.5
Control system and processes of two-volume рneumoshock-absorber
The model describing working processes in the two-volume pneumoshock-absorber and dynamics of the damped object is constructed and investigated. The model allows to carry out the analysis and to reveal the basic laws and features in work, both pneumoshock-absorbers, and operated valves at various operating modes of the pneumoshock-absorber
Текст обзорной статьи Система управления и процессы двухобъемного пневмоамортизатора
Управляемые пневматические виброзащитные устройства могут наиболее полно удовлетворять требованиям систем амортизации (СА) различных амортизируемых объектов (АО), так как обеспечивают регулирование упруго-демпфирующей характеристики (УДХ) и хорошую виброзащиту [1]. В них в качестве рабочего тела используется лишь одна фаза - газ, благодаря чему нет необходимости выполнения отдельных демпфирующих устройств.
В работе предложено и исследовано устройство для демпфирования колебаний объектов - двухобъемный пневмоамортизатор (ПА), в котором демпфирование колебаний объекта осуществляется за счет перетекания массы газа из одного объема ПА в другой и обратно (рис. 1) [2]. Выбор режима работы ПА осуществляется системой управления клапаном ПА (рис. 2) [3]. В зависимости от конструкции клапанных устройств и их настройки ПА могут работать в различных режимах и иметь широкий диапазон упруго-демпфирующих характеристик. В связи с этим возникает необходимость выбора оптимальных режимов работы ПА с коммутацией объемов и описание их рабочих процессов через термодинамические параметры газа в объемах. При этом необходимо получить общие системы дифференциальных уравнений, включающие и уравнения динамики АО, решение которых позволило бы провести соответствующий анализ и выявить основные закономерности и особенности в работе, как самих ПА, так и клапанных устройств.
Рис. 1. Двухобъемный пневмоамортизатор
При работе ПА в его объемах периодически находится неодинаковое количество газа. Рабочий объем, как пра- вило, изменяется во времени и вместе с тем изменяется состояние газа (давление, масса газа в объемах, температура), что приводит к изменению внутренней энергии. Так, например, при сжатии ПА затрачивается подведенная работа dL, в результате чего увеличивается внутренняя энергия dU, что вызывает повышение температуры. При повышении температуры некоторое количество тепла dQ вследствие непрерывного теплообмена передается к стенкам ПА и в окружающую среду, находящихся при более низкой температуре. Это явление незначительно влияет на колебательный процесс АО. На колебательный процесс АО также оказывают влияние силы трения в местах сопрягаемых деталей ПА (резинокордной оболочки и направляющих арматур), силы трения, возникающие вследствие деформации силового корда (каркаса) и в целом оболочки, силы трения в направляющих роликах, шарнирных элементах и т. д. Суммарная сила трения определяется, как правило, опытным путем, то есть при снятии рабочих характеристик ПА без какого-либо демпфирующего устройства и уточняется при свободных колебаниях АО. Экспериментальными исследованиями [4] было установлено, что суммарная сила трения в РКО приближенно равна 0,01 Мд (логарифмический декремент затухания 5 = 0,75).
Однако демпфирующая способность ПА за счет теплоотдачи через стенки в окружающую среду и диссипации энергии в РКО недостаточна для интенсивного демпфирования колебаний АО, и здесь требуется постановка специальных гасителей колебаний, обеспечивающих поглощение энергии 50-70 % и более.
При составлении уравнений процессов в ПА примем следующие допущения:
-
- рабочий газ в ПА подчиняется законам идеальных газов;
-
- вследствие кратковременности воздействия внешний теплообмен не учитывается и рабочий процесс в ПА считается адиабатическим;
-
- процессы выравнивания давления в объемах ПА при коммутации объемов происходят мгновенно;
-
- движение АО осуществляется в вертикальном направлении;
-
- эффективная площадь ( S ) ПА при движении АО не меняется;
-
- утечки газа из ПА отсутствуют.
Для определения термогазодинамических параметров в объемах ПА выделим следующие режимы работы ПА:
-
– первый режим: происходит процесс выравнивания давления в объемах ПА, при этом давление газа в дополнительном объеме Рq больше, чем давление газа в рабочем объеме Рр : Рq > Рр , скорость вертикального перемещения z & 0 = 0, клапан открыт, происходит истечение газа из дополнительного объема в рабочий объем Vq ^ Vp ;
-
– второй режим: ПА в режиме сжатия, клапан закрыт z & 0< 0; Рр > Рq ;
-
– третий режим: происходит процесс выравнивания давления в объемах ПА, при этом z & 0= 0, Рр > Рq , клапан открыт, происходит истечение газа из рабочего объема в дополнительный объем Vp ^ Vq ;
-
– четвертый режим: ПА в режиме отбоя, клапан закрыт z & 0> 0, Рр < Рq .
Построим математическую модель динамики ПА при свободных колебаниях АО, при этом рассмотрим каждый режим работы ПА в отдельности.
При первом режиме в начале хода сжатия осуществляется процесс выравнивания давления в объемах ПА. Истечение газа происходит из дополнительного объема в рабочий объем.
Уравнение первого закона термодинамики данного режима для рабочего объема будет иметь вид dUp + dLp = dQдm, (1) где dLр – элементарная работа, совершаемая над газом при сжатии ПА
к РqVq dQ - - = К^ХX *" '' (4)
Из уравнения состояния газа определим dTp :
d T = P p dV p + V p dP p - RT p d- p ^ q "
p Rmp , где dPp – изменение давления газа в рабочем объеме при сжатии ПА.
Подставив значения Сv и dTp в уравнение (3) и преобразовав его, получим dUp= T~PPpdVp + VpdPp )■ (5)
k - 1
Таким образом, используя полученные выражения (2), (4) и (5), уравнение (1) примет вид
-
dP p =— kP p S э z + kP q V q d- q ^ P ( 6)
-
dt V p 0 + S э z 0 V p - q dt ’
где S э – эффективная площадь ПА; P р 0 , V р 0 – давление газа в рабочем объеме ПА и его объем при статическом положении АО; z 0, z &0, & z &0 – относительные перемещения, скорость и ускорение АО.
Уравнение первого закона термодинамики данного режима для дополнительного объема будет иметь вид
dUq + dLq = - dQ д m .
По аналогии
dLр = Pp dVp ;
dVp – изменение рабочего объема при сжатии ПА; dUр – изменение внутренней энергии в объемах ПА
dU = —( PqdVq + VqdPq ); dL = P dV, q k — ix q q q qq q q
dUp= CvTpdmp + CvmpdTр ; (3) Cv – удельная теплоемкость воздуха при постоянном объеме; Tp , dTр – температура и изменение температуры воздуха в рабочем объеме; mp , dmp – масса воздуха и ее изменение в рабочем объеме ПА в текущий момент времени; dQ D m – элементарное количество тепла, вынесенное текущим газом c массой dmq ^ p из дополнительного объема в рабочий объем
где dVq = 0, так как Vq = const, следовательно q q k РV dU„ =----V„dP ; dL = 0; dQn = —— q q dm ,„.
q k —1 q q q D m k - 1 mq q ^ p
Таким образом, окончательное уравнение для дополнительного объема примет вид
dP q =- kP q d- q ^ р dtmq dt
.
dQ D - = C p T q dm q . p
PV т = q q ; C = R ' C q Rm ; p k -1’ V
C p k ,
Из теории истечения газов [5; 6] расход газа через проходное сечение клапана при коммутации объемов выглядит следующим образом:
P
– при докритическом режиме, когда q > 0,528:
P p
где Cр – удельная теплоемкость воздуха при постоянном давлении; R – газовая постоянная; K – показатель адиаба-
ты; mq , dmq – масса воздуха и ее изменение в дополнительном объеме ПА в текущий момент времени; Tq – температура воздуха в дополнительном объеме.
Тогда
d- p ^ q K
=V F P™ dt
2 k P q m q k - 1 V q
k -1 '
) k
p -1
P
- при критическом режиме, когда — < 0,528: P p
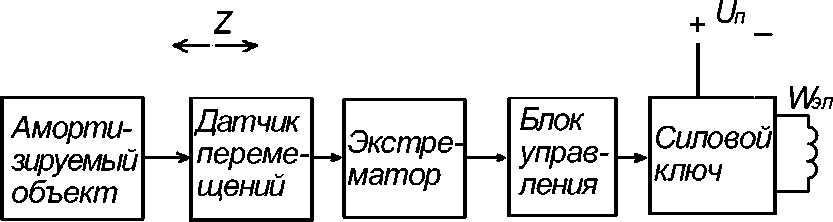
Рис. 2. Система управления импульсным клапаном
2 k P q m q ( 2 ) k - 1
7 1 ТЛ I 7 1 I , k — 1 Vq X k +1 / где Fn — площадь проходных сечений клапана; Ц - коэф-
dm p ^ q — масса газа, перенесенная из рабочего объема в дополнительный объем, рассчитывается следующим образом:
фициент расхода газа через клапан
или
dmq^p — fF 2k Ppmp dt k-1 Vp
d m P ^ q к
= Ц F кл dt
|
k -1 |
1 |
||
|
2 k P q m q |
(pA k р |
- 1 |
|
|
k - 1 V |
p J |
||
|
q |
X q v |
J |
2 k P p m p Г 2 ) k -1 ---—— ---
7 1 т r 7 1
k - 1 V p X k + 1 )
P при — > 0,528;
Pq dmp ^ q
Тогда, с учетом уравнений (6)–(8) система дифференциальных уравнений, описывающая первый режим работы ПА, будет иметь вид
dt
P при p^- < 0,528
V p
= Ц F кл
2 k P q m q Г 2 ) k -1
;
dz
= V p 0 + S э Z 0 + V q ; z 0 = ^ t^;
dP p dt
kPS Z о +
kP q V q dm q ^ p .
V p 0 + S э z 0 V P m q
dt
;
Mz = ( P p - P a ) S э - Mg - R x ( sign z 0 ) - z n ( t ) . (11) При четвертом режиме ПА находится в режиме от-
dP q dt
kP q dm qMp .
mq dt
;
dm q ^ P p
ЦЛк dt
2 k P p m p k — 1 V p
k -1 '
k
- 1
X p
P при — > 0,528;
P q
боя, клапан закрыт z & 0> 0, Рр < Рq :
dPp kPpSэz0
---- —--; z 0 —;
dt VP 0 + Sэ z 0
Mz — ( P p - P a ) S э - М ■ g - R ^ ( sign z 0 ) - z п ( t ) . (12)
При дальнейшей работе ПА все термогазодинамические процессы в объемах ПА повторяются.
Исследования динамики ПА проводились для следующих исходных данных ПА и АО:
dm q ^ P p
"FK dt
P при — < 0,528;
P p
2 k P p m p Г 2 ) k -1
– масса АО равна М = 75 000 кг;
– средний диаметр резинокордной оболочки d ср = 0,575 м;
– эффективная площадь ПА S эф
л- d - р 2
= 0,26 м 2 ;
dz
V p — V p 0 + S э Z 0 + V q ; Z 0 = -dt X
Mz — ( Pp - P ) S э - M ■ g - R x ( sig nZ0 )- zп ( t ) . (9) zn , z & n , & z & n – абсолютные перемещения, скорость и ускорение основания ПА; М – масса амортизированного объекта; g - ускорение силы тяжести; R x - сила трения, зависящая от скорости движения АО.
При втором режиме работы ПА клапан закрыт.
Система дифференциальных уравнений, описывающая второй режим работы ПА, имеет вид dPp kPpSэz0
----=; z. = dt Vp 0 + Sэ z 0
MZ = ( P p - Р а ) S э - Mg - R x ( sig nZ 0 ) - z п ( t ) , (10) где P a – атмосферное давление.
При третьем режиме происходит процесс выравнивания давления в объемах ПА, при этом z &0 = 0, Рр > Рq , клапан открыт, истечение газа происходит из Vp ^ Vq .
Система дифференциальных уравнений, описывающая режим работы ПА, имеет вид dPp — _ kPpSэz + kPp dmp^q dt Vp 0 + Sэ z 0 mp dt ;
dP q = kP p V p dm р _ q dt mрVq dt ;
– температура в начале хода сжатия Т = 308 о К;
– давление в рабочем объеме в статическом положе-
„ M - 10
нии Ppo —------= 2,888 ■ 10 6 Па;
S эф
– суммарный объем ПА в статическом положении V o = 0,63 м 3 ;
– дополнительный объем ПА в статическом положе-V нии V — — = 0,315 м3;
qo 2
– рабочий объем ПА в статическом положении V po — V o - V q 0 = 0,315 м 3 ;
– суммарная масса газа в рабочем и дополнительном объе-
PD o ■ Vo мах ПА в статическом положении m — —p----=2,058 кг;
сум R ■ T - 10
-
– в исходном положении ПА поднят на высоту Z o = 0,365 м;
-
– рабочий объем ПА в исходном положении V p — V po + Z ■ S э ф = 0,41 м 3 ;
-
– давление в рабочем объеме в исходном положении
P ■ V
P — po o = 2,511 ■ 10 6 Па;
P V P + V q
-
– давление в дополнительном объеме в исходном положении Р д = Р р = 2,511 ■ 10 6 Па;
-
– масса газа в рабочем объеме в исходном положе- m ■ V„
нии m„ —--------= 1,164 кг;
P V p + V q
-
– масса газа в дополнительном объеме в исходном положении mq = m сум – m р = 0,895 кг;
-
– начальная скорость u o( Z o)= 0 м/с;
-
– прочие параметры R = 287 Дж/(кг ⋅ о К); µ = 0,7; k = 1,41.
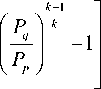
Расчет динамики проводился, начиная с исходного положения АО (рис. 3, уровень «1»), свободные колебания АО затухали около статического положения АО (рис. 3, уровень «О»), По результатам расчета динамики ПА с электроклапаном построены графики свободных колебаний различных параметров АО (рис. 4-6). На графиках
Vq параметр Р* = —- - отношение объемов ПА при стати-
Р° ческом положении АО (Р* = 1+3).
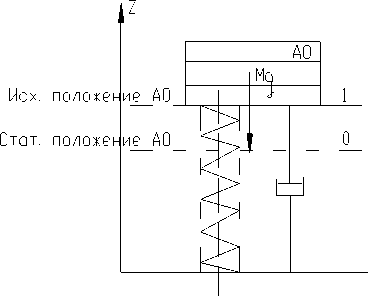
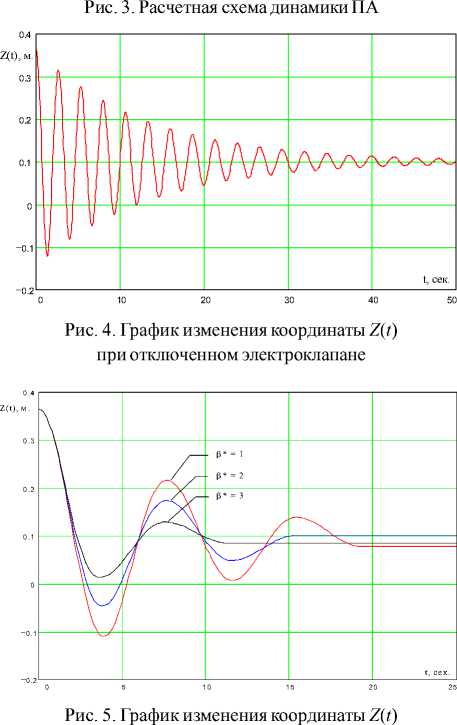
Проведенные теоретич показали, что ПА обеспеч вание свободных колебаний. Кривые свободных колебаний позволили также установить, что при демпфировании при включении электроклапана при работе ПА время затухания колебаний АО снизилось (с 40 с при отключенном электроклапане до 10…15 с при включенном электроклапане при различных значениях параметра β*), наибольшее демпфирование ПА имеет за первый период коже демпфирование колебаний возрастает с значения параметра β*.
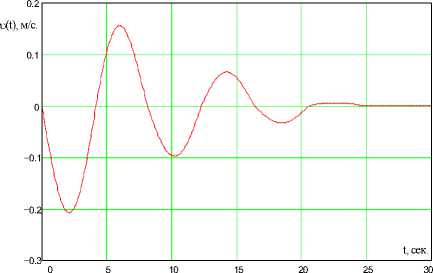
афик изменения скорости u ( t ) (при β * = 1) и различных значениях параметра β *
татам теоретических исследований строит-рис. 7). Поглощенная энергия колебаний АО отражается площадью петли гистерезиса на т выбираемого алгоритма работы системы лапана можно получать петлю гистерезиса с ее различным расположением относительно статической характеристики ПА (рис. 7, а (кривая а–b) или рис. 7, б (кривая а–с)).
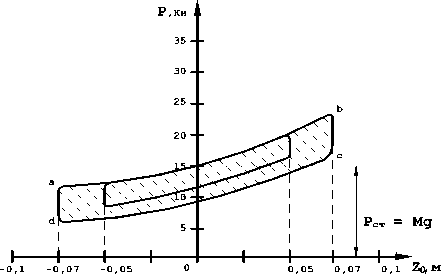
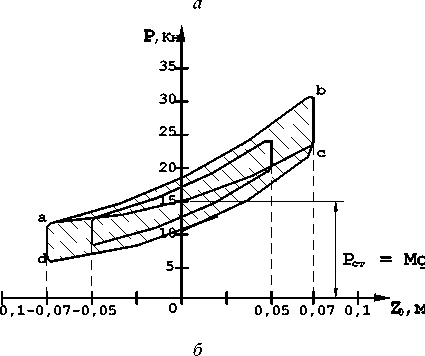
Рис. 7. Упругодемпфирующая характеристика ПА
Таким образом, предложенный управляемый двухобъемный ПА с электроклапаном в перегородке обеспечивает резкое улучшение демпфирующих свойств колебательной системы, регулирование упругодемпфирующих характеристик и одновременно хорошую виброударозащи-ту различных объектов, в том числе крупногабаритных объектов, транспортных средств, технологического оборудования. Полученная модель, описывающая рабочие процессы ПА и динамику АО, позволяет провести анализ и выявить основные закономерности работы ПА.
