Система управления наведением гидроразрушителя мобильного робототехнического комплекса

Бесплатный доступ
В статье описывается система управления специальным оружием (гидроразрушителем) мобильного робототехнического комплекса. На основе выявленных недостатков данной системы предлагается модернизированная система управления наведением специального оружия для обезвреживания боевых целей и обеспечения безопасности личного состава подразделений, выполняющих взрывотехнические работы.
Короткий адрес: https://sciup.org/14966973
IDR: 14966973
Текст научной статьи Система управления наведением гидроразрушителя мобильного робототехнического комплекса
Д ля обнаружения взрывных устройств во многих странах созданы специальные мобильные робототехнические комплексы, которые обеспечивают эффективное и безопасное для личного состава подразделений выполнение необходимых взрывотехнических работ [1, 2]. В нашей стране и ряде других стран хорошо зарекомендовали себя такие робототехнические комплексы, как «Варан», «Вездеход – ТМ5», «Богомол» и др.
Данные мобильные робототехнические комплексы (МРК) представляют собой набор механизмов, устройств и приспособлений, предназначенных для выполнения следующих оперативно-тактических задач:
-
♦ проведения визуальной разведки, поиска и первичного диагностирования подозрительных на наличие взрывного устройства (ВУ) предметов с помощью телевизионных камер и специального навесного оборудования;
-
♦ обезвреживания ВУ с помощью специального оружия (гидроразрушителя), загрузки ВУ в специальные контейнеры для эвакуации, а также выполнения технологических операций по обеспечению доступа к ВУ [3].
Основным элементом МРК является мобильный робот (фото 1, 2). Он представляет собой транспортное средство (ТС), в корпусе которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи и система энергообеспечения – отсек аккумуляторный. На корпусе транспортного средства монтируется манипулятор и сменное технологическое оборудование, подключаемое к мобильному роботу (МР) на панелях управления и распределительной коробке. Мобильный робот оснащен телевизионной системой, системой освещения и каналом акустической связи. Все его исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
МР управляется в командном режиме с поста дистанционного управления.
Основными средствами борьбы с взрывными устройствами, используемыми в таких мобильных робототехнических комплексах, являются ствольные разрушители [4].
Ствольный гидродинамический разрушитель действует по принципу создания мощной гидравлической струи, имеющей скорость до 220 - 300 м/с и способной разрушать взрывоопасные предметы в относительно непрочных корпусах [5].
Структурная схема системы управления представлена на рис. 1.
Система управления МРК делится на три части:
-
♦ система управления движением;
-
♦ система управления манипулятором;
-
♦ система управления обзорно-телевизионной установкой.
Система управления движением осуществляет управление гусеничными движителями.
Система управления манипулятором предназначена для

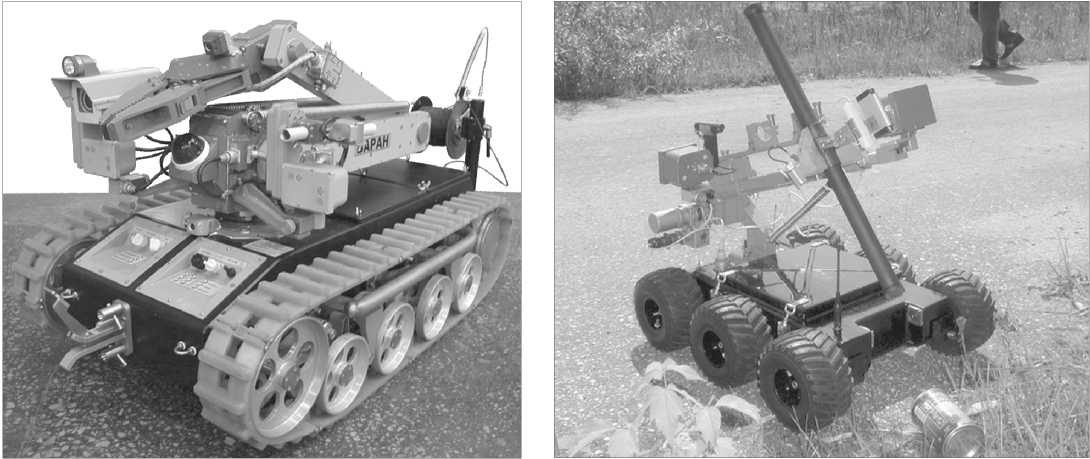
Фото 1. Мобильный робот «Варан»
Фото 2. Гидроразрушитель, установленный на МРК «Вездеход ТМ-5»

Рис. 1. Структурная схема системы управления МРК
осуществления перемещения объекта (либо специального оружия – гидроразрушителя) в пространстве. Данная система управления не обладает достаточной точностью наведения гидроразрушителя, необходимой для надежного обезвреживания взрывоопасных предметов.
Система дистанционного управления (СДУ) предназначена для дистанционного управления исполнительными механизмами и устройствами. Управление осуществляется по радиоканалу на удалении до 1000 м или по кабелю на удалении до 200 м.
По конструктивному признаку СДУ делится на две части: ♦ пультовая часть;
-
♦ бортовая часть.
Пультовая часть СДУ, расположенная в пульте управления (ПУ) поста дистанционного управления (ПДУ), предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления.
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР, предназначена для приема сигналов управления, поступающих в зависимости от режима работы по радиолинии или кабелю, их обработки, усиления и распределения по соответствующим исполнительным устройствам и механизмам.
Для работы в условиях, сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех), СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР.
Модуль ДУ и ДК (рис. 2) формирует дискретные команды и пропорциональные сигналы управления на модуль управления манипулятором и модуль управления ТС, которые непосредственно управляют приводами. Информация с телекамер, а также с датчиков телеметрии поступает в модуль ДУ и ДК, где формируется видеосигнал и сигнал телеметрии, поступающие на видео и аудио входы ТВ-передатчика. С ТВ-приемника на пульте управления видеосигнал отображается на ТВ-мониторе, а аудиосигнал поступает на модуль телеметрии,
Бортовая часть системы
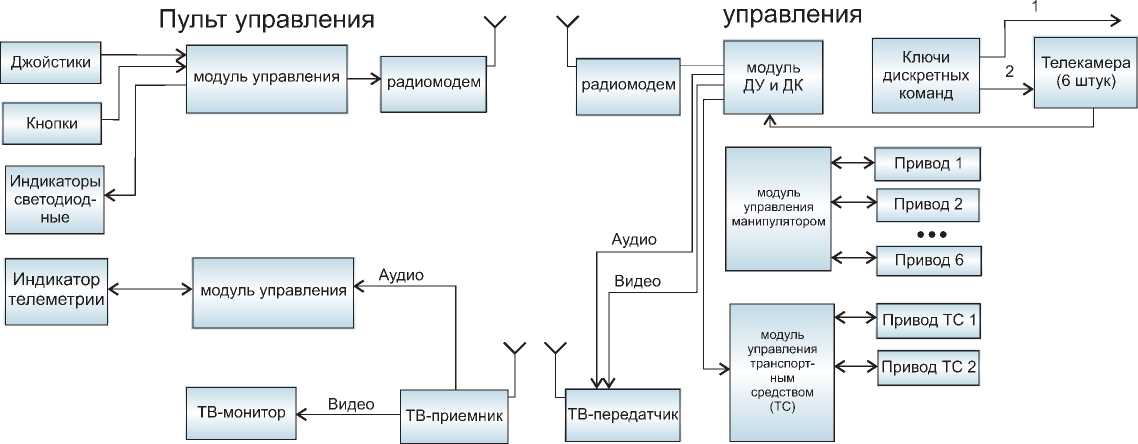
Рис. 2. Структурная схема каналов управления: 1 – управление сигналами; 2 – управление телекамерами
где декодируется и отображается на индикаторе.
В связи с имеющимися недостатками системы управления специального оружия (гидроразрушителя) в данной статье предлагается модернизировать систему управления наведением гидроразрушителя. Усовершенствованная система управления представлена на рис. 3, 4.
Управление приводами наведения гидроразрушителя осуществляется оператором с пульта дистанционного управления. Сигнал пропорционального управления с джойстика поступает в АЦП, где преобразуется в цифровой код. В контроллере формируется информационная кодограмма, которая передается по каналу управления: по кабелю или по радио. В зависимости от того, какой из режимов работы МРК выбран, цифровой сигнал управления поступает на радиопе- редатчик канала дистанционного управления или в кабельный канал связи.
На контроллер бортовой части системы управления поступают цифровые сигналы управления от радиоприемника или кабельного канала связи. В контроллере кодограмма разделяется на сигналы управления, которые распределяются в соответствии с адресом на объекты управления. С выхода контроллера сигнал поступает на блок управления приводом горизонтального или вертикального наведения. Блок управления приводом формирует ШИМ-сигнал управления исполнительным двигателем.
Для обеспечения качественной обратной связи и организации управления приводами используется магнитно-резистивный инкрементный датчик (энкодер) MR, тип М-228179.


Этот датчик работает на магнитно-резистивном эффекте: сопротивление зависит от направления векторов магнитного поля и тока. Если они перпендикулярны друг другу, то сопротивление малое, если нет – сопротивление большое. По выходным сигналам с энкоде-ра, то есть, какой сигнал появился раньше, судят о направлении вращения.
Блок управления ПВН (рис. 4) и механизм вертикального наведения, состоящий из двигателя, редукторов (планетарного и червячного) и энкодера, образуют привод вертикального наведения, а блок управления ПГН и механизм горизонтального наведения образуют привод горизонтального наведения. Видеоизображение, представляющее собой электрический видеосигнал, с ТВ-камеры наведения передается по ТВ-каналу (кабелю или радио), отображаясь на жидкокристаллическом мониторе пульта управления.
В заключение необходимо отметить, что предложенная система управления позволит осуществлять наведение специального оружия на боевую цель с точностью до 0,1°, что является достаточным для ее обезвреживания с высокой степенью вероятности при ограниченном запасе боеприпасов на борту мобильного робота.
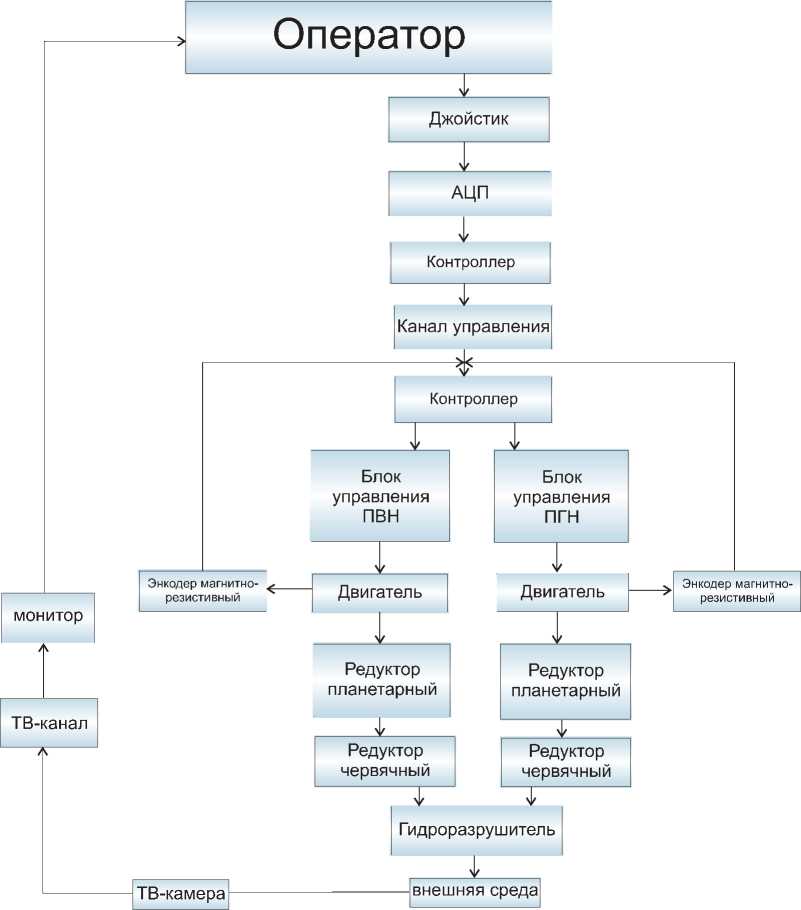
Рис. 4. Функциональная схема системы управления вертикальным и горизонтальным наведением гидроразрушителя
Список литературы Система управления наведением гидроразрушителя мобильного робототехнического комплекса
- Батанов А.Ф., Грицынин С.Н., Муркин С.В. Мобильные роботизированные взрывотехнические комплексы/Специальная техника, 1999. -№ 4. -С. 21 -30.
- Юревич Е. И. Основы робототехники/2-е изд., перераб. и доп. -СПб.: БХВ-Петербург, 2005. -416 с.
- Мобильный робототехнический комплекс «Варан»/Каталог. -ОАО «Специальное конструкторское бюро приборостроения и автоматики», 2005.
- Полин А.В., Васейко Ю.М., Голубков И.Н. Дистанционно-управляемый мобильный комплекс для работы с взрывоопасными предметами/Экстремальная робототехника: Сб. трудов VIII Международной научно-технической конференции. -СПб, 1997 -С. 179 -181.
- Батанов А.Ф., Грицынин С.Н., Муркин С.В. Робототехнические комплексы для обеспечения специальных операций/Специальная техника, 1999. -№ 6. -С. 10 -17.
- Пелёвина Е.Н. Гидроразрушители мобильных роботов -эффективное средство для борьбы с взрывными устройствами в антитеррористических операциях/Спецтехника и связь, 2008. -№ 1 -С. 18 -21.
