Система управления опорно-поворотным устройством на базе асинхронного электропривода с частотным регулированием

Автор: И.А. Данилушкин, С.А. Колпащиков, Е.В. Мельников
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
В статье рассматривается система автоматического управления позиционированием опорноповоротного устройства антенны, построенная на базе асинхронного электропривода с частотным преобразователем, реализующим векторное управление моментом. Система выполнена в виде двухконтурной структуры подчиненного регулирования. Внутренний контур управления по скорости вращения электропривода реализуется преобразователем частоты, внешний контур позиционирования реализуется программным обеспечением программируемого логического контроллера с обратной связью по углу поворота антенны. Предложен подход к формализации единой математической модели замкнутого контура управления, учитывающей динамические характеристики электропривода, редуктора и нагрузки, а также дискретный характер формирования управляющих воздействий для внутреннего контура, обусловленный передачей уставок по промышленному протоколу Modbus RTU. Показано, что задержки и период обновления управляющих сигналов оказывают существенное влияние на динамику системы и должны учитываться при синтезе регуляторов. Для азимутальной и угломестной осей разработаны специализированные модели, учитывающие изменение приведенного момента инерции при изменении пространственного положения антенны, а также воздействие возмущающих моментов, обусловленных ветровой нагрузкой и несбалансированным моментом силы тяжести. С использованием среды MATLAB/Simulink проведен вычислительный эксперимент, направленный на анализ работы системы в предельных режимах, включая разгон с максимальными угловыми ускорениями и одновременное действие возмущений. Выполнен расчет настроек ПИ-регуляторов внешнего контура позиционирования с учетом требований к точности, отсутствию колебаний и технической реализуемости системы. Результаты моделирования показали, что предложенная структура системы управления обеспечивает заданную точность позиционирования ±0,03° во всех рассмотренных режимах работы без выхода электропривода на ограничения по моменту и скорости. Отмечена необходимость уточнения параметров регуляторов на этапе пусконаладочных работ с учетом реальных динамических характеристик силового каскада.
Опорно-поворотное устройство, позиционирование антенны, двухконтурная система управления, система подчиненного регулирования, математическое моделирование, асинхронный электропривод, преобразователь частоты, программируемый логический контроллер
Короткий адрес: https://sciup.org/148333483
IDR: 148333483 | УДК: 681.513.3:621.313.333 | DOI: 10.37313/1990-5378-2026-28-2-43-52
Control System for a Slewing Drive Based on an Asynchronous Electric Drive with Frequency Control
This paper considers an automatic control system for antenna positioning using a slewing drive based on an asynchronous electric drive with a frequency converter implementing vector torque control. The control system is designed as a two-loop cascade control structure. The inner speed control loop of the electric drive is implemented by the frequency converter, while the outer positioning loop is implemented by the software of a programmable logic controller with feedback on the antenna rotation angle. An approach to the formalization of a unified mathematical model of the closed-loop control system is proposed. The model takes into account the dynamic characteristics of the electric drive, gearbox, and load, as well as the discrete nature of control signal generation for the inner loop caused by the transmission of setpoints via the industrial Modbus RTU protocol. It is shown that communication delays and the control signal update period have a significant effect on system dynamics and must be considered during control system design. Specialized models for the azimuth and elevation axes are developed, taking into account variations in the equivalent moment of inertia due to changes in the spatial orientation of the antenna, as well as the influence of disturbance torques caused by wind load and unbalanced gravitational torque. A computational experiment using the MATLAB/Simulink environment is carried out to analyze system behavior under extreme operating conditions, including acceleration with maximum angular acceleration and simultaneous action of disturbances. The parameters of PI controllers for the outer positioning loop are calculated with consideration of accuracy requirements, absence of oscillations, and technical feasibility of the system. Simulation results demonstrate that the proposed control system structure ensures the specified positioning accuracy of ±0.03° in all considered operating modes without reaching the torque and speed limits of the electric drive. The need for refinement of controller parameters during commissioning is noted, taking into account the actual dynamic characteristics of the power stage.
Текст научной статьи Система управления опорно-поворотным устройством на базе асинхронного электропривода с частотным регулированием
Опорно-поворотные устройства (ОПУ) широко применяются в системах слежения, позиционирования и наведения, используемых в радиолокационных станциях, оптико-электронных системах и антеннах спутниковой связи. Одной из ключевых задач при создании таких систем является обеспечение высокой точности и скорости позиционирования при ограниченных ресурсах исполнительных механизмов. Требования к системам управления ОПУ определяются необходимостью надежного отслеживания подвижных целей, а также компенсации внешних возмущений и механических ограничений конструкции. Подходы к проектированию систем управления ОПУ включают использование как классических методов автоматического регулирования, так и более сложных структур, учитывающих нелинейности, ограничения и взаимное влияние параметров азимута и угла места. Для обоснования выбора архитектуры системы управления и параметров регуляторов требуется проведение численного моделирования, учитывающего ограничения, обусловленные особенностями аппаратной реализации.
В [1] приведена классификация управляемых ОПУ, рассматриваются требования, предъявляемые к системам управления ОПУ. Много исследований посвящено системам на базе двигателей постоянного тока (ДПТ) [2–7], также исследуются системы позиционирования, построенные с применением других типов электропривода: синхронного двигателя с постоянными магнитами [8], вентильного двигателя [9], двухфазного гибридного шагового двигателя [10]. Применение различных типов электропривода говорит о продолжающемся поиске эффективного аппаратного решения, с учетом развития технологий. Одним из перспективных направлений совершенствования систем позиционирования является применение асинхронного электродвигателя с векторным управлением. Такое решение обладает рядом преимуществ: высокая надежность, простота конструкции и отсутствие щеток, возможность управления скоростью в широком диапазоне.
Требования к точности позиционирования ОПУ зависит от задач, для решения которых предназначена антенна. В [11] исследуется эффективность применения ПИД-закона регулирования для решения задач позиционирования подвижной спутниковой антенны. В [3,6,10] авторы строят систему позиционирования на базе наблюдателя полного порядка и представления объекта управления в пространстве состояний. Авторы [6] исследуют представление системы в дискретном пространстве состояний. В [4] авторы сравнивают несколько способов построения систем позиционирования ОПУ: использование скользящего режима, применение ПИД-регулятора и ПИД-регулятора дробного порядка, управление на основе прогнозирующей модели (MPC-контроллер). Расчет оптимальных параметров для каждого из типов регуляторов осуществляется с помощью метода роя частиц. Применение MPC-контроллера рассматривается и в работе [2]. В [7] авторы исследуют применение нелинейного ПИД-регулятора, ограничивая диапазон изменения интегральной составляющей функцией арктангенса от интеграла ошибки. Оптимальные параметры нелинейного ПИД-регулятора авторы ищут с помощью метода роя частиц. В [5] исследуется применение ПИД-регулятора с адаптивным алгоритмом подстройки. В [9] рассматривается синтез системы управления с переменной структурой на базе системы подчиненного регулирования, обеспечивающей апериодический переходный процесс. Система содержит оптимальный и модальный регуляторы, что обеспечивает высокое быстродействие при отработке заданного перемещения и устойчивость при действии возмущения по моменту сопротивления. В [12] синтезируется дискретный регулятор на базе системы подчиненного регулирования, изначально синтезированной с применением ПИД-закона регулирования. Таким образом применение ПИД-закона регулирования в большинстве решаемых задач позиционирования ОПУ обеспечивает требуемые характеристики системы.
В данной статье исследуется возможность построения системы позиционирования ОПУ на базе асинхронного двигателя с преобразователем частоты, реализующим векторное управление с обратной связью по скорости вращения вала двигателя. При этом ключевыми задачами являются формализация единой математической модели замкнутого контура управления, учет специфики возмущений и нелинейностей при позиционировании по азимуту и углу места, а также экспериментальная проверка рабочих характеристик системы в условиях, близких к реальным нагрузкам.
Целью работы является моделирование и исследование системы автоматического управления ОПУ, предназначенной для обеспечения заданной точности позиционирования антенны при отслеживании программного задатчика. На основе результатов моделирования оценивается возможность реализации системы с требуемыми динамическими и точностными характеристиками в условиях, соответствующих реальным режимам эксплуатации.
2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ АНТЕННЫ
Рассматриваемое ОПУ реализуется как двухосная система позиционирования антенны. Требования к диапазонам регулирования и точности позиционирования приведены в табл. 1. В табл. 2 приведены физические характеристики оборудования.
Позиционирование по каждой из осей осуществляется независимо, с помощью электропривода (рис. 1), реализованного на базе асинхронного двигателя (М) с регулируемым преобразователем частоты ВЕСПЕР с обратной связью по скорости асинхронного электродвигателя и векторным управлением моментом [13]. В качестве датчика обратной связи по скорости (Д2) выступает инкрементальный энкодер. Перемещение антенны производится с помощью системы редукторов (Р). Положение антенны по каждой из осей измеряется с помощью датчика углового положения (Д1). Датчики угловых положений антенны подключены к ПЛК, на котором реализуется система автоматического управления позиционированием антенны. ПЛК формирует задания (уставки) по скорости вращения электропривода каждой из осей и передаёт их по протоколу Modbus-RTU.
Принято решение о реализации систем автоматического управления позиционированием антенны по каждой из осей в виде двухконтурной системы подчиненного регулирования [14]. Внутренний контур обеспечивает поддержание заданной скорости вращения электродвигателя и
Таблица 1. Требования к системам автоматического управления ОПУ
|
Характеристика |
Азимутальная ось |
Ось угла места |
|
Диапазон позиционирования |
от -270° до +270° |
от -90° до +90° |
|
Погрешность позиционирования |
±0,03° |
±0,03° |
|
Максимальная угловая скорость |
9 °/c |
6 °/c |
|
Максимальное угловое ускорение |
3 °/c2 |
2 °/c2 |
Таблица 2. Параметры моделирования систем автоматического управления ОПУ
|
Характеристика |
Азимутальная ось |
Ось угла места |
|
Передаточное число редуктора |
457,6 |
1341 |
|
Максимальный момент на валу двигателя |
30 Н - м |
30 Н - м |
|
Скорость вращения двигателя |
1390 об/мин |
1390 об/мин |
|
Момент инерции на выходном валу редуктора |
4281 кг - м2 |
5018 кг - м2 |
|
Коэффициент вязкого трения на выходном валу редуктора |
1021 Н - м - с |
8768 Н - м - с |
|
Расчетный момент ветровой нагрузки (45°, ветер 25 м/с) |
5270 Н - м |
5270Н - м |
|
Несбалансированный момент силы тяжести |
– |
1750Н - м |
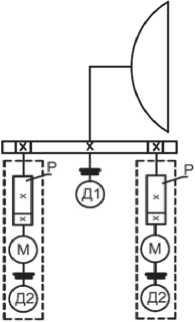
a)
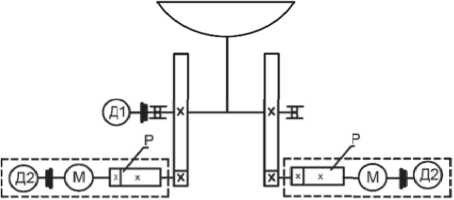
б)
Рис. 1. Кинематическая схема осей вращения: а – азимутальная, б – угломестная;
М – электропривод, Р – редуктор, Д1 – датчик углового положения антенны, Д2 – датчик скорости привода
реализуется встроенным регулятором преобразователя частоты. Внешний контур выполняет позиционирование антенны на заданный угол с помощью регулятора, реализуемого на ПЛК.
Разделение функции регулирования между двумя устройствами (ПЛК, ПЧ) и жесткие требования к точности позиционирования антенны требуют учитывать при выборе регуляторов и их настроечных параметров временные задержки, возникающие в реальной системе и связанные с:
– формированием измерительного сигнала на выходе датчика;
– временем выполнения алгоритма в управляющем контроллере;
– временем передачи данных по промышленной сети.
В рассматриваемой системе, быстродействие датчиков очень велико по сравнению с двумя другими факторами, поэтому задержки преобразования информации в них можно не учитывать. Цикл типового управляющего контроллера в настоящее время не превышает 1 мс и тоже может быть проигнорирован при синтезе систем управления.
Самым существенным звеном, определяющим дискретный характер поведения системы управления, выступает процесс передачи данных по промышленной сети. В качестве прото- кола промышленной сети, в системе выступает Modbus RTU [15] с максимальной скоростью передачи данных 19200 бит/с. Одна транзакция по протоколу Modbus RTU, позволяющая передать значение скорости вращения электропривода для преобразователя частоты ВЕСПЕР занимает 26 байтов:
– запрос (14,5 байтов): признак начала пакета – 3,5 байта; адрес устройства – 1 байт; код функции (10h) – 1 байт; адрес регистра – 2 байта; количество регистров – 2 байта; количество байт данных – 1 байт; данные – 2 байта; контрольная сумма CRC – 2 байта;
– ответ (11,5 байтов): признак начала пакета – 3,5 байта; адрес устройства – 1 байт; код функции (10h) – 1 байт; адрес регистра – 2 байта; количество регистров – 2 байта; контрольная сумма CRC – 2 байта.
Каждый байт в RTU-режиме представляется 11 битами (3 бита служебной информации и 8 битов данных). Поэтому длительность одной транзакции составляет: 26·11/19200 = 0,014896 с » 15 мс. Таким образом, для оценки поведения реальной системы, необходимо учесть дискретизацию по времени.
Процедура расчета систем управления по каждой из осей должна учитывать особенности объектов управления. Антенна не сбалансирована по оси угла места, поэтому при изменении угла места воздействие силы тяжести на антенну создает дополнительный момент на валу привода, который зависит от значения угла места. Изменение положения антенны по углу места также влияет на изменение момента инерции при вращении опорно-поворотного устройства вокруг азимутальной оси.
3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ
Момент M(t) на валу электродвигателя описывается дифференциальным уравнением [16]
M ( t ) = J (0 ( t ) + B ro ( t ) , (1)
где J – момент инерции вокруг соответствующей оси, приведенный к валу двигателя, кг×м2; B – коэффициент вязкого трения, приведенный к валу двигателя, Н*м*с/рад; ro (t) - угловая скорость вращения электродвигателя, рад/с.
Из (1) может быть получена передаточная функция для скорости двигателя в пространстве изображений по Лапласу:
W . ( Р ) =
i2
JR p + BR
Вращающий момент подается на ОПУ через редуктор, с передаточным числом i. Момент инерции ОПУ на выходном валу редуктора JR и коэффициент вязкого трения ОПУ на выходном валу редуктора BR связаны с соответствующими величинами на валу двигателя выражениями:
J = JR/i 2 , (3)
B = BR/i 2 .
Подставив (3), (4) в (2) получили передаточную функцию двигателя с учетом параметров нагрузки:
Wde ( P) =
i2
JR p + BR
Скорость вращения выходного вала редуктора связана со скоростью вращения электропривода соотношением
ro R = го/ i.
Угол поворота антенны (выходного вала редуктора) по каждой из осей определяется как интеграл скорости ее перемещения:
t 1 t
Jr – момент инерции на выходном валу редуктора;
Br – коэффициент вязкого трения на выходном валу редуктора;
ir – передаточное число редуктора;
Mmax – максимальное значение момента на валу двигателя (параметр блока Saturation).
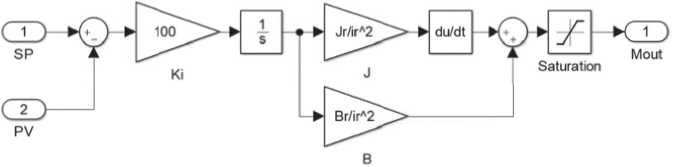
Рис. 2. Simulink-модель преобразователя частоты
Simulink-модель системы управления поворотом вокруг оси, с учетом (5), (7) представлена на рис. 3. Она представляет собой систему подчиненного регулирования, внутренний контур с обратной связью по угловой скорости, реализуется с помощью модели преобразователя частоты (блок FC). Внешний контур с обратной связью по углу поворота вала редуктора реализуется с помощью блока ПИД-регулятора (PID) с ограничением на максимальное значение выходной величины – уставки по скорости. Ограничение на скорость обмена данными по протоколу Modbus RTU реализуется с помощью блока экстраполятора нулевого порядка ЭП0, который каждые 15 мс фиксирует на своем выходе текущее значение входа. Это соответствует реальной ситуации, когда новое значение уставки с выхода ПИД-регулятора передается преобразователю частоты один раз в 15 мс.

Рис. 3. Базовая Simulink-модель системы управления поворотом вокруг оси
Высокое быстродействие внутреннего контура по сравнению с внешним позволяет при расчете настроек регулятора внешнего контура, учитывать внутренний контур как апериодическое звено первого порядка с постоянной времени в десятые доли секунды.
Представленная на рис. 3 Simulink-модель является универсальной моделью, которая используется как базовая для систем управления позиционированием по азимуту и по углу места. Однако для анализа систем базовая модель требует модификации с учетом их функциональных особенностей.
4. СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПО АЗИМУТУ
Модель позиционирования по азимуту должна учитывать изменение момента инерции ОПУ из-за изменения положения антенны по углу места. Зависимость момента инерции на выходном валу редуктора по азимутальной оси Jaz от величины угла места фel будет описываться выражением az el az 2 el
J R ( ф R ) = J R 0 ’ ( 1 + sin ф R ) , (8)
где JR0 - момент инерции при ф el = 0 . Зависимость (8) должна быть учтена в модели (рис. 3) передаточной функцией апериодического звена (5) с переменным параметром постоянной времени. Такое апериодическое звено может быть реализовано на базе интегрирующего звена B R Д JRp ) , охваченного отрицательной обратной связью:
2 2
W ooc ( p ) = — BR
B R
J R p
+
J R p
£ Br
B r J r P + Br
• 2
i
J R p + BR
= Wde ( p )•
При таком представлении появляется возможность изменять постоянную времени в процессе моделирования (рис. 4).
Возмущение моментом ветровой нагрузки Mвозм учитывается как прибавка к моменту на валу двигателя, с учетом передаточного числа редуктора (рис. 4):
M t^ = M ^м h .
R
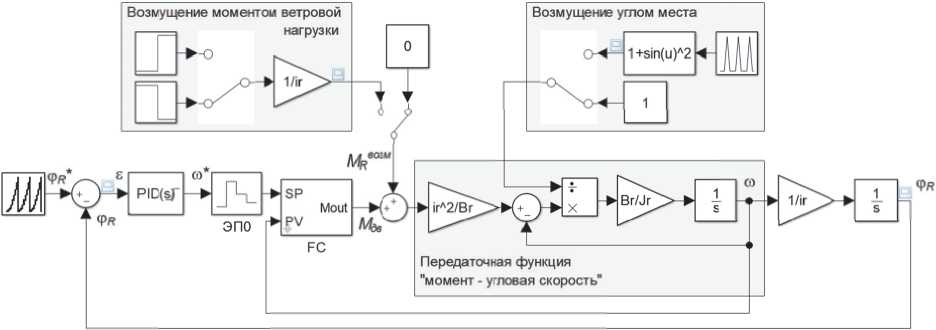
Рис. 4. Simulink-модель системы позиционирования по азимуту
Расчет настроек ПИ-регулятора осуществлялся исходя из требований к переходному процессу при отработке возмущения моментом ветровой нагрузки с последующей проверкой поведения системы при изменении уставки. Требования к переходному процессу по возмущению: отсутствие статической ошибки; максимальное отклонение должно лежать в пределах заданной погрешности позиционирования; отсутствие колебаний. Соответствие первому критерию обеспечено структурой регулятора. Последние два критерия находятся в противоречии друг с другом, поэтому, при расчете оптимальных настроек в качестве целевой функции выступает требование к отсутствию колебаний, а требование по максимальному отклонению является ограничением задачи оптимизации. На рис. 5.а представлен график отработки возмущения моментом ветровой нагрузки. Рассчитанные оптимальные настройки ПИ-регулятора с передаточной функцией
Ww ( p } = K ( 1 + 1/p ) (11)
обеспечивают незначительное перерегулирование при значениях K=18000, I=8.
Исследование системы управления предполагает проверку нахождения контролируемого параметра в допустимых пределах отклонения при предельных изменениях значений управляющих и возмущающих воздействий. К таким относятся: воздействие ветровой нагрузки с максимальным значением момента (рис. 5.а); разгон с максимальным угловым ускорением (рис. 5.б); возмущение изменением момента инерции.
На рис. 5.б представлен профиль изменения уставки скорости с максимальным угловым ускорением до максимальной угловой скорости и движение с максимальной угловой скоростью. Ошибка управления при движении с максимальным угловым ускорением не превышает 0,01°. При движении с постоянной скоростью ошибка управления равна нулю.
Изменение момента инерции при изменении угла места достигает максимальной величины при положении в 45° и перемещении с максимальной угловой скоростью. Вычислительные эксперименты с моделью (рис. 4) показали, что это возмущение слишком незначительно и реакция системы практически не заметна: ошибка управления составляет десятитысячные доли градуса и соизмерима с погрешностью моделирования.
На рис. 5.в представлен график, соответствующий наихудшей ситуации: во время движения с предельным ускорением, на антенну действует ветровая нагрузка с максимальным моментом, направленная против направления движения. Анализ показал, что в наихудшей ситуации ошибка управления не превышает предельно установленной величины 0,03°.
5. СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПО УГЛУ МЕСТА
Из-за наличия несбалансированного момента силы тяжести (табл. 1) модель позиционирования по углу места должна учитывать его влияние при изменении положения антенны по углу места (рис. 6)
M G ( ϕ eRl ) = M G max ⋅ sin ϕ eRl , (12)
где M G max – максимальное значение несбалансированного момента при ϕ e R l =± 90 °.
Возмущение моментом ветровой нагрузки Mвозм учитывается аналогично модели поворота вокруг азимутальной оси (рис. 4).
a)
б )
в )
Рис. 5. Реакция системы позиционирования по азимутальной оси на изменение уставки и возмущающее воздействие
Требования к переходному процессу и задача поиска оптимальных настроек регулятора со структурой (11) решалась для системы позиционирования по углу места аналогично решению для системы позиционирования по азимуту. Основное отличие заключается в том, что для системы позиционирования по углу места момент силы тяжести привносит дополнительное возмущение и перемещение антенны в крайних положениях (±90°) носит более показательный характер для оценки точности системы позиционирования.
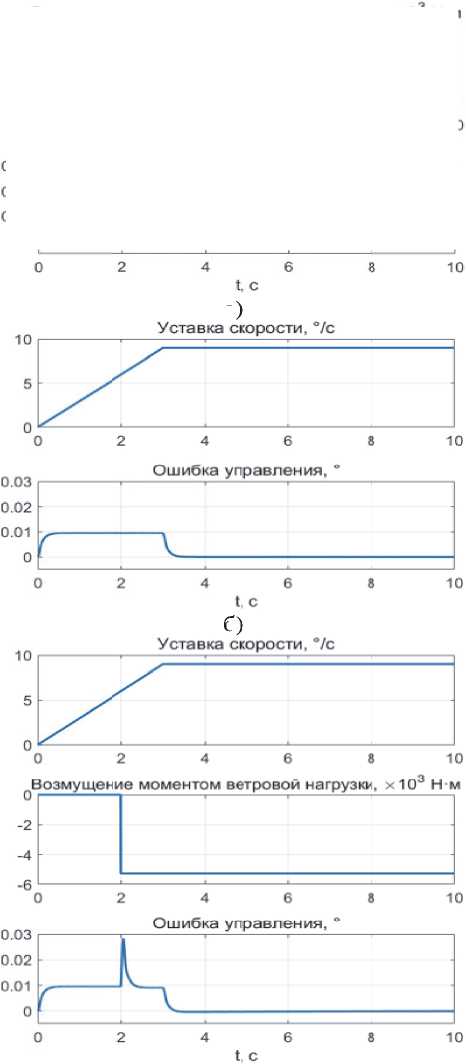
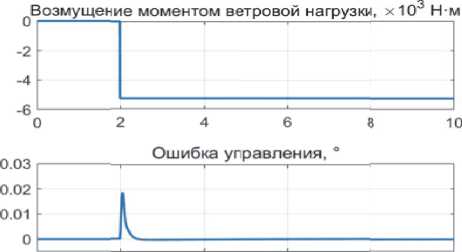
На рис. 7 представлены результаты исследования Simulink-модели системы позиционирования по углу места. Движение начинается из положения –90°. На рис. 7.а представлен график отработки возмущения моментом ветровой нагрузки. В данном оптимальные настройки ПИ-регулятора (K=60000, I=8) обеспечивают поддержание заданной точности путем незначительного перерегулирования при отработке возмущения.
На рис. 7.б представлен профиль изменения уставки скорости с максимальным угловым ускорением до максимальной угловой скорости и движение с максимальной угловой скоростью. Ошибка управления при движении с максимальным угловым ускорением не превышает 0,006°. При движении с постоянной скоростью ошибка управления равна нулю.
На рис. 7.в представлена наихудшая ситуация: во время движения с предельным ускорением, на антенну действует ветровая нагрузка с максимальным моментом, направленная против направления движения. Ошибка управления не превышает предельно установленной величины 0,03°.
6. ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ И ЗАКЛЮЧЕНИЕ
Полученные результаты моделирования показывают, что системы автоматического управления позиционированием антенны позволяют обеспечить требуемую точность позиционирования ±0,03° во всех режимах функционирования ОПУ.
При моделировании дополнительно проводился контроль выхода модели преобразовате- ля частоты на ограничение по максимальному моменту и выход электродвигателя на ограничение по максимальной скорости вращения. Такой контроль продиктован проверкой технической реализуемости системы управления. В результате вычислительных экспериментов установлено, что выходов на ограничения нет, при выбранной технической реализации система позиционирования обеспечивает заданные требования.
В статье рассмотрен подход к построению и исследованию системы управления позиционированием антенны, основанный на использовании единой динамической модели замкнутого контура, учитывающей реальные ограничения аппаратной реализации, включая дискретный характер передачи управляющих воздействий по промышленной сети. Использование данной модели по- зволяет на этапе проектирования оценивать точность позиционирования и поведение системы в предельных режимах работы без упрощения структуры управления.
Необходимо отметить, что реальные динамические характеристики электроприводов и ограничения по быстродействию преобразователя частоты ВЕСПЕР могут потребовать коррекции настроек
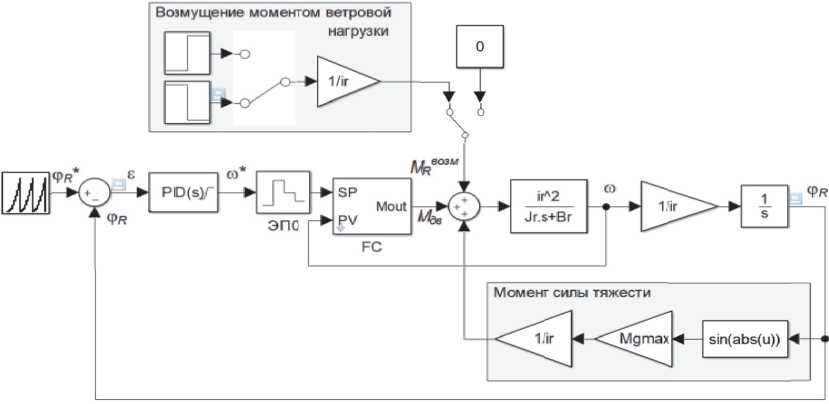
Рис. 6. Simulink-модель системы позиционирования по углу места
регуляторов на этапе пусконаладочных работ. Для гарантированного исключения автоколебаний антенной системы потребуется провести комплексное исследование динамических свойств силового каскада: преобразователя частоты в связке с асинхронным двигателем и энкодером, реализующим обратную связь по скорости вращения.
