Система управления погрузочными устройствами для перемещения грузов

Автор: Бабоченко Наталья Владимировна
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Информатизация и автоматизация
Статья в выпуске: 2 (11), 2016 года.
Бесплатный доступ
Предложено использование электрогидравлической системы управления погрузочными устройствами для перемещения грузов, включающей коллекторный двигатель с тиристорной схемой регулирования, гидравлические и электрические коммуникации, выносной электрический пульт управления. Усовершенствована тиристорная схема регулирования коллекторного двигателя и рассмотрен принцип действия автоматизированной электрогидравлической системы управления погрузочными устройствами на примере устройства с шарнирно-стержневой стрелой.
Система управления, погрузочное устройство, тиристорная схема регулирования, шарнирно-стержневая стрела, электрогидравлическая система управления
Короткий адрес: https://sciup.org/14770143
IDR: 14770143 | УДК: 621.869:681.5
Management system handling equipment to move cargo
Proposed use of electro-loading device management system for the movement of goods, including commutator motor with thyristor control circuit, hydraulic and electrical communications, remote electric control panel. We consider, an improved thyristor commutator motor control circuit and operation of automated handling equipment electrohydraulic control system of the device with the example of joint-core boom.
Текст научной статьи Система управления погрузочными устройствами для перемещения грузов
Введение. Погрузочные устройства, используемые в настоящее время для перемещения грузов, требуют регулирования скорости перемещения грузозахватного органа. В погрузочных устройствах с электроприводом обычно применяют асинхронные электродвигатели повышенного скольжения (серии АС и АОС), с повышенным пусковым моментом (АП и АОП) и двигатели с фазным ротором (АК и АОК). Однако подобные двигатели обеспечивают в основном “растянутый” пуск, воспринимают перегрузки при разгоне и торможении системы. Для регулирования скорости перемещения грузозахватного органа возможно использование коллекторных электродвигателей постоянного тока. Однако необходимость в постоянном токе существенно ограничивает область применения погрузочных устройств с электроприводом. Возможна работа коллекторного электродвигателя с последовательным возбуждением и на переменном токе. Но серийные коллекторные электродвигатели переменного тока имеют серийные недостатки: искрение на коллекторах, повышение тока на обмотке и её перегрев, снижение к.п.д.
Основная часть. Изучив используемые системы управления погрузочными устройствами для перемещения грузов [ 1,2 ] , получили электрогидравлическую систему управления, которую предлагаем использовать для управления погрузочными устройствами, перемещающими крупногабаритные грузы.
Погрузочное устройство для перемещения крупногабаритных грузов, представленное на рисунке 1, содержит шарнирно-стержневую коренную секцию 1, смонтированную на опорно-поворотном устройстве 2, и рукоять 3 с грузозахватным органом. Объектами управления являются гидроцилиндры 4 и 5 пространственного приводного механизма (для подъёма и поворота стрелы) и параллельные гидроцилиндры 6 вертикального поворота рукояти. Конструктивно задумано формирование целенаправленного замкнутого силового потока, проходящего, в частности, через специальный шарнир 7 и замыкаемый на основании посредством опорно-поворотного устройства 2 и шарниров 8 с двумя степенями свободы. Запорно-распределительные устройства выполнены в виде электроуправляемых двухпозиционных кранов 9-12, которые сгруппированы в функциональные блоки 13 и 14. В каждом блоке размещены два крана с гидравлическими и электрическими коммуникациями; общее число блоков равно шести. Таким образом, для каждого гидроцилиндра предусмотрено два блока и четыре электроуправляемых крана. Блоки, и краны унифицированы между собой.
Принцип управления погрузочным устройством покажем на примере работы одного из гидроцилиндров 4 приводного механизма. С помощью выносного электрического пульта управления 15 – нажатием одной кнопки – подаётся электрический сигнал на электрические элементы двух электроуправляемых двухпозиционных кранов (в данном случае кранов 9 и 12, крестообразно электрически связанных между собой линий 16). Краны 9 и 12 находятся в разных функциональных блоках 13 и 14, т. е. задействуются оба блока. Элементы включения каждой пары электроуправляемых кранов сблокированы с цепью управления электродвигателем 17 – через тиристорный регулятор частоты вращения 18 и обмотку возбуждения 19. Вследствие этого включение любой кнопки на пульте управления является сигналом для запуска двигателя. Последний приводит во вращение гидронасос 20, который забирает рабочую жидкость из бака и нагнетает её в канал 21 (на рис. 1 нагнетание и слив обозначены Н и С). Откуда жидкость по гидролинии 22 поступает в открытый кран 9 блока 13 и далее по гидролинии 23 нагнетается в штоковую полость гидроцилиндра 4, вызывая перемещение штока с поршнем. Из поршневой полости этого цилиндра, по гидролинии 24 жидкость, минуя закрытый кран 10, поступает в гидролинию 25, в открытый кран 12 блока 14 и посредством гидролинии 26 сбрасывается в сливной канал 27, откуда – в бак. Для перемещения поршня со штоком в противоположную сторону включают другую кнопку управления и задействуют сдублированную электролинией 28 другую пару электроуправляемых кранов 11 и 10. Цепь управления электродвигателем снабжена также переменным сопротивлением 30, которое встроено в выносной электрический пульт 15 и функционирует во взаимодействии с тиристорным регулятором частоты вращения 18.
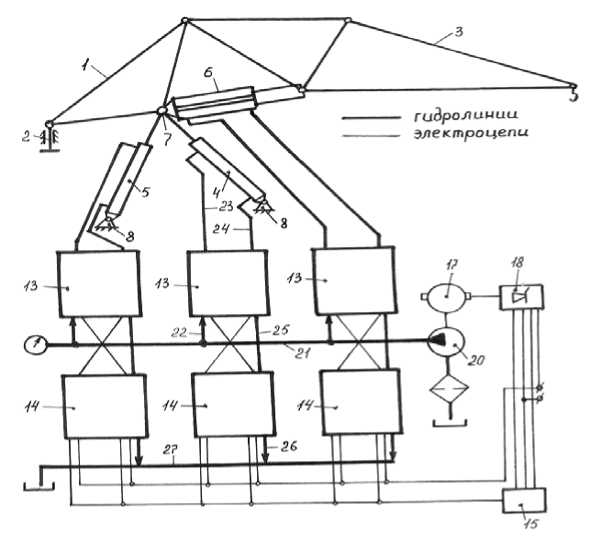
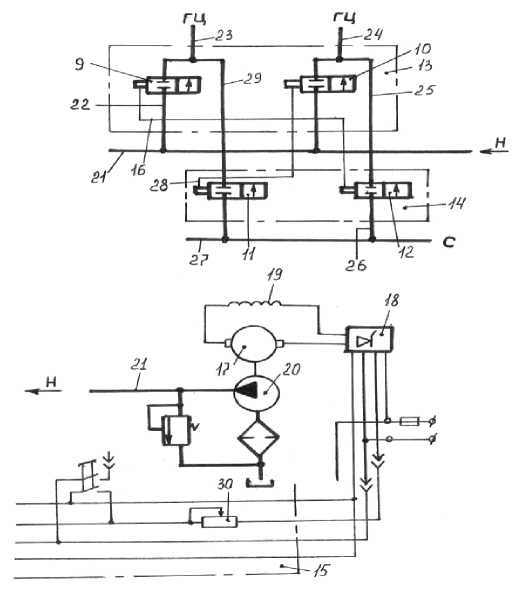
Рисунок 1 - Блок-схема управления погрузочными устройствами
Как известно, тиристор имеет два состояния: он открыт или закрыт – работает в режиме ключа, вследствие чего у него потребление мощности мизерное. Тиристор открывается и закрывается лавинообразно (мгновенно). Ток двигателя регулируется отпиранием и запиранием тиристора 100 раз в секунду (каждой полуволны), при этом происходит уменьшение тока до минимального значения со временем. Форма тока при тиристорном регулировании отличается от синусоиды, что делает невозможным применение других машин переменного или постоянного тока.
Коллекторный электродвигатель переменного тока с тиристорной схемой регулирования номинальной мощности 0,45 кВт, напряжением 250 В и номинальной частоты вращения 1450 мин –1 был применён в крупномасштабных моделях погрузочных устройств, с шарнирно-стержневой стрелой [3 - 5]. При чем, тиристорная схема сочетается с электрогидравлической системой управления и сблокирована с нею – включение двигателя и соответствующих электрокранов происходит одновременно. Это означает, что двигатель практически не работает на холостом ходу и допускает запуск под нагрузкой. Управление погрузочным устройством с выносного электрического пульта – это ещё одно преимущество системы. Тиристоры потребляют мизерную энергию, долговечны и миниатюрны. Вся система регулирования малогабаритна и компактна. Схема характеризуется также существенным снижением силы тока в обмотках якоря, что предотвращает искрение и перегрев двигателя, снижает электропотребление. Двигатель работает в экономичном режиме почти постоянной мощности.
Заключение. Благодаря использованию оригинальной схемы тиристорного регулирования двигателя достигается стабильная эффективная работа системы, в том числе автоматизированное регулирование скорости подъема груза, также возможен запуск двигателя под нагрузкой. Использование тиристорного регулирования коллекторного двигателя способствует энергосбережению и улучшению эксплуатационно-технологических показателей погрузочных устройств, используемых для перемещения грузов.
Список литературы Система управления погрузочными устройствами для перемещения грузов
- Кривельская, Н.В. Перспективная электрогидравлическая система управления грузоподъемным средством /В.И. Пындак, Кривельская Н.В.//Успехи современного естествознания.-2005. -№9. -С.82-83.
- Патент РФ на изобретение №2231494. Устройство для управления гидравлическим манипулятором/Пындак В.И., Кривельская Н.В. -Опубл. 2004. -11 с.
- Бабоченко Н.В., Усовершенствованное шарнирно-стержневое грузоподъемное средство с электрогидравлической системой управления //Известия нижневолжского агроуниверситетского комплекса.-2015. -№1(37). -С.115 -119.
- Патент РФ на изобретение №2178382 РФ. Стрела грузоподьёмного средства/Пындак В.И., Кривельская Н.В. -Опубл. 2002. -8 с.
- Патент РФ на полезную модель №145959. Стрела грузоподьёмного средства/Бабоченко Н.В. -Опубл. 2014 г. -8 с.
