Система управления роботом-манипулятором с использованием нейросетевых алгоритмов ограничения рабочей области схвата

Автор: Войнов Игорь Вячеславович, Казанцев Александр Михайлович, Морозов Борис Александрович, Носиков Максим Владимирович
Рубрика: Управление в технических системах
Статья в выпуске: 4 т.17, 2017 года.
Бесплатный доступ
Описаны состав и структура системы управления промышленным робототехническим комплексом, предназначенным для работы в герметичных камерах в условиях сильных радиационных излучений. В связи с превышением рабочей зоны манипулятора робототехнического комплекса над рабочим пространством герметичной камеры и необходимостью останова или уменьшения скорости движения при достижении зон ограничения предложено использование искусственной нейронной сети на основе персептрона с сигмоидальной функцией активации, формирующего на выходе сигнал в диапазоне [0; 1], используемый как коэффициент передачи сигналов от внешних контуров управления и органов ручного управления манипулятором к внутренним контурам системы управления. Приведен вариант структуры системы управления, представлен способ формирования обучающих выборок нейронной сети и результаты математического моделирования работы системы управления.
Робот-манипулятор, искусственная нейронная сеть, персептрон, обучающая выборка, система управления
Короткий адрес: https://sciup.org/147155224
IDR: 147155224 | УДК: 007.51:007.52:681.51 | DOI: 10.14529/ctcr170404
Control system of the robot-manipulator with use of neural network algorithms of restriction of work area of the gripper
This article covers control system architecture of industrial robot (manipulator), designed to work in heavy nuclear fields. To increase safety of manipulator control and moving an additional level of monitoring gripper position has been added to control system. This level includes artificial neural network, based on perceptron with output signal in range [0;1], which is used as a coefficient of transferring manual controls from joysticks to internal loops of control system. Outlined the way of preparing teaching data set for neural network and results of control system math modeling.
Текст научной статьи Система управления роботом-манипулятором с использованием нейросетевых алгоритмов ограничения рабочей области схвата
В 2015 году филиалом Южно-Уральского государственного университета в г. Миассе по техническому заданию одного из ведущих предприятий атомной промышленности был спроектирован и изготовлен робототехнический комплекс МР-48. Его основное назначение – исключение ручных операций и введение автоматизированных и автоматических режимов работы при выполнении технологических операций с материалами в условиях сильных радиационных полей. Манипулятор робототехнического комплекса МР-48 конструктивно представляет собой шестизвенный манипулятор с вращательными степенями свободы в каждом сочленении. Кинематическая схема манипулятора, а также системы координат, связанные с каждым из звеньев, заданные в соответствии с правилами Денавита – Хартенберга [1], представлены на рис. 1, 2.
Рис. 1. Кинематическая cхема манипулятора МР-48
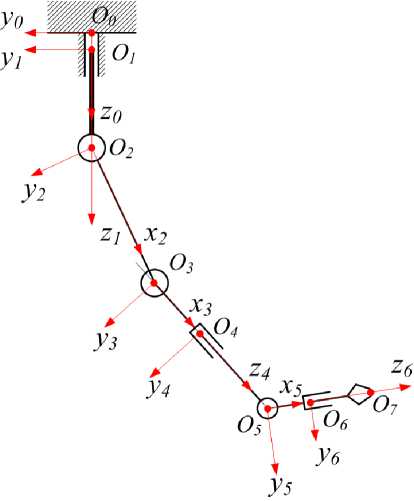
Рис. 2. Оси систем координат, связанные со звеньями
Управление в технических системах
Параметры кинематики манипулятора в представлении Денавита – Хартенберга приведены в таблице.
Параметры системы координат звеньев манипулятора
|
i |
Сдвиг θ i , ° |
α i , ° |
a i , м |
d i , м |
Диапазон, ° |
|
1 |
0 |
90 |
0 |
0,14 |
+176…–251 |
|
2 |
90 |
0 |
0,39 |
0 |
±109 |
|
3 |
90 |
90 |
0,02 |
0 |
±95 |
|
4 |
180 |
90 |
0 |
0,32 |
±194 |
|
5 |
180 |
90 |
0,02 |
0 |
±109 |
|
6 |
0 |
0 |
0 |
0,35 |
±360 |
В состав аппаратуры роботизированного комплекса МР-48 входит, помимо манипулятора, пульт оператора с ЭВМ и органами управления, источники питания, усилительно-преобразующие модули, соединительные кабели. Структурная схема робототехнического комплекса представлена на рис. 3. Внешний вид манипулятора МР-48 и его пульта управления представлен на рис. 4, 5.
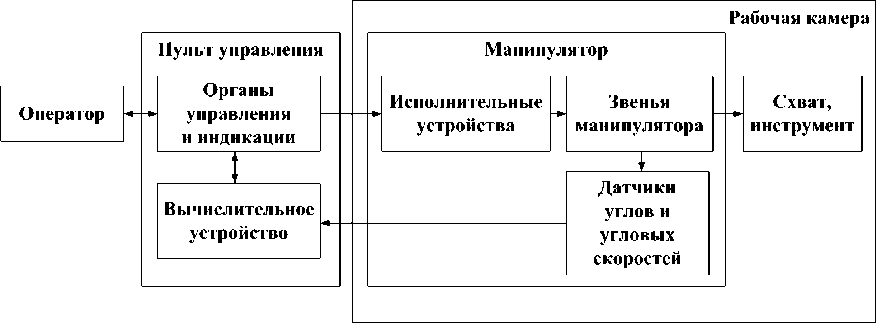
Рис. 3. Структурная схема робототехнического комплекса МР-48

Рис. 4. Внешний вид манипулятора МР-48

Рис. 5. Внешний вид пульта управления
Описание системы управления
Ядром системы управления (СУ) является ЭВМ пульта оператора, сопряженная с органами управления, датчиками и исполнительными устройствами посредством модулей ввода-вывода, также являющимися аппаратно-программными компонентами системы управления.
Входными и промежуточными сигналами системы управления манипулятора являются:
-
1. Воздействия оператора на органы управления M i ;
-
2. Мгновенные углы поворота (ориентации) звеньев q i ;
-
3. Мгновенные угловые скорости поворота звеньев ω i ;
-
4. Требуемые значения углов и угловых скоростей q i уст , ω i уст , формируемые в контурах системы управления.
Выходными сигналами системы управления являются токи I i ( i = 1…6, т. е. для каждого исполнительного электродвигателя в составе звена), формируемые в каждый момент времени таким образом, чтобы манипулятор осуществлял требуемый характер движения.
В целом система управления является дискретной, с периодом формирования управляющих воздействий 20 мс. В силу специфики объекта управления (манипулятора) и режимов его работы СУ реализована в виде нескольких вложенных контуров управления, реализованных на аппаратном, аппаратно-программном либо программном уровнях.
Функциональная схема системы управления представлена на рис. 6.

Рис. 6. Функциональная схема системы управления манипулятора
На функциональной схеме обозначены:
-
КК 1 – корректирующий контур (регулятор) стабилизации скорости вращения звеньев манипулятора;
-
УМ – усилитель мощности, преобразующий широтно-модулированые сигналы управления в выходной ток исполнительных органов манипулятора;
-
КК 2 – корректирующий контур (регулятор) положения звеньев манипулятора;
-
qi – мгновенные углы ориентации звеньев манипулятора;
-
ω i – мгновенные угловые скорости поворота звеньев манипулятора;
-
I i – токи в исполнительных электродвигателях манипулятора;
Следует отметить, что управление манипулятором осуществляется в одном из трех основных режимов:
-
1. Режим ручного управления, при котором оператор с помощью отклонения двух многоосевых джойстиков от нейтрального положения задает уставки скоростей поворота звеньев манипулятора ω i уст рр , контролируя конфигурацию манипулятора визуально либо по показаниям датчиков углов на пульте управления;
-
2. Режим управления в заданной системе координат, при котором оператор с помощью отклонения двух многоосевых джойстиков задает линейную скорость и направление движения точки схвата манипулятора ( О 7 , рис. 2).
-
3. Режим формирования и последующего автоматического воспроизведения траектории движения манипулятора. В режиме воспроизведения траектории система управления автоматически формирует новые векторы углов ориентации звеньев в зависимости от времени q i уст = f ( t ) .
Типовым местом установки манипулятора при его эксплуатации является потолок герметичной защищенной рабочей камеры с вертикальным исходным положением МР-48, при этом, в за-
Управление в технических системах
висимости от типа рабочей камеры и ее линейных размеров, возможно частичное превышение рабочего пространства манипулятора над рабочей зоной камеры.
В ходе испытаний и опытной эксплуатации манипулятора, проводимых в течении 2016 года на предприятии заказчика, были выявлены случаи касания и ударов схвата манипулятора о стенки и внутренние элементы камеры, что может привести к возможным механическим повреждениям внутрикамерного оборудования и собственно манипулятора. В связи с этим был предложен вариант усовершенствования системы управления путем ввода дополнительного контура контроля нахождения схвата манипулятора в безопасной рабочей области (рис. 7).

Рис. 7. Функциональная схема системы управления с контуром контроля рабочей области
Блок контроля рабочей области на основе информации о параметрах движения манипулятора с использованием классических методов решения прямой кинематической задачи вычисляет линейные координаты схвата манипулятора и далее сравнивает их с подпространством допустимых либо недопустимых координат (в простейшем варианте – из заранее сформированных массивов допустимых положений), формируя при этом необходимый набор выходных сигналов, используемых для коррекции или полной блокировки движения манипулятора.
В общем случае безопасная рабочая область (БРО) может иметь достаточно сложную конфигурацию и соответственно сложное геометрическое описание. Для составления такого описания зачастую требуются большие временные затраты высококвалифицированного персонала.
Одним из возможных путей решения задачи является применение искусственных нейронных сетей (ИНС) для задания БРО и контроля за выходом схвата манипулятора из нее. Как известно, ИНС обладает хорошими классификационными характеристиками, что можно использовать для выделения БРО из общего объема камеры [2]. Данный способ не требует предварительного геометрического описания БРО, так как оно автоматически формируется в процессе обучения (как на этапе начального обучения ИНС, так и в ходе эксплуатации при переобучении). Кроме того, нейросетевой алгоритм обладает высокой численной эффективностью, что немаловажно с учетом его встраивания в контур системы управления.
С целью проверки возможности использования ИНС для контроля выхода за границы БРО проведено компьютерное моделирование системы управления. С учетом того, что имеющееся управляющее программное обеспечение (ПО) разработано в системе NI LabView, для моделирования также использовалась данная среда. Дополнительно использованы программные пакеты расширения среды разработки NI Robotics (моделирование кинематики и динамики движения манипуляторов) и NI Super Simple Neural Networks (работа с ИНС).
В общем виде модель функционирования ИНС описывается выражением
Y = F^w^) = F(5) = F(WXT), (1)
где W = (w1, w2,..., wn ) - вектор весовых коэффициентов;
X = (x1, x2,..., xn) - вектор входных сигналов;
-
5 = Е ” =1 W j X j - взвешенная сумма;
-
F - оператор нелинейного преобразования или функция активации.
Сигмоидальная ИНС (персептрон) с одним скрытым слоем имеет структуру, представленную на рис. 8.
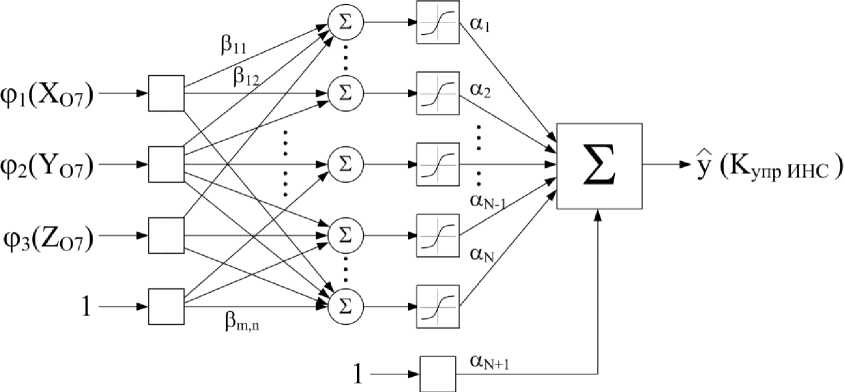
Рис. 8. Структура сигмоидальной ИНС с одним скрытым слоем
Выходное значение ИНС такого типа рассчитывается по формуле
-
У (ф, р, а) = S^ i а ; tanhQ^ i P i./ Ф у ) + а „+ь (2)
где N – количество нейронов в скрытом слое;
-
n – количество входных данных (входной слой);
ϕ = [φ 1 , …, φ n , 1]T – входной слой (исходные данные);
-
β – матрица весовых коэффициентов;
-
α – вектор весовых коэффициентов выходного слоя;
tanh – гиперболический тангенс.
В общем случае в персептроне может быть несколько скрытых слоев, тогда выход предыдущего слоя k
-
Vp^tanh^+X-Vy) (3)
рассматривается как вход скрытого слоя k + 1.
Входной слой ИНС формируется из текущих координат X , Y , Z схвата в базовой системе координат (точка O 7 на рис. 2). На выходном слое формируется значение K упр ИНС в диапазоне [0; 1], где 0 – выход за границы БРО, 1 – нахождение в пределах БРО. На данном этапе разделение областей производится по пороговому значению 0,5. При фиксации выхода за границы БРО коэффициент передачи положений органов управления резко снижается до некоторого минимального значения и оператору подается звуковой сигнал. Таким образом, ИНС выполняет роль контролера, но полностью не блокирует действия оператора, которому по-прежнему остается доступным весь объем камеры.
В процессе моделирования имитируется движение манипулятора по обучающей траектории, которая по возможности равномерно заполняет БРО. По ходу движения по обучающей траектории с тактом работы системы управления производится накопление массива данных о координатах X , Y , Z схвата (рис. 9).
Для формирования обучающего и проверочного набора данных полная рабочая область манипулятора покрывается сетью допустимых точек (в соответствии с его кинематической схемой и возможными углами поворота по осям) по методу Монте-Карло. Точкам, входящим в зону ε – трубки вокруг обучающей траектории, приписывается выходное значение 1 ( ε подбирается с таким расчетом, чтобы полностью «заполнить» БРО). К обучающему набору присоединяются также все точки обучающей траектории с выходным сигналом 1. Всем оставшимся точкам обучающего и проверочного набора приписывается выходное значение 0. Подмножество обучающего набора с выходом, равным 1 для объёма набора 10 000 точек и ε = 0,05, представлено на рис. 10.
Управление в технических системах
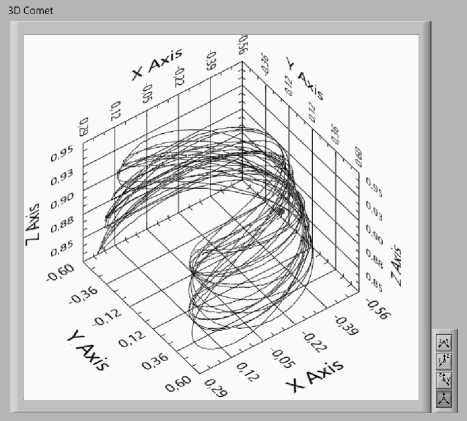
Рис. 9. Обучающая траектория
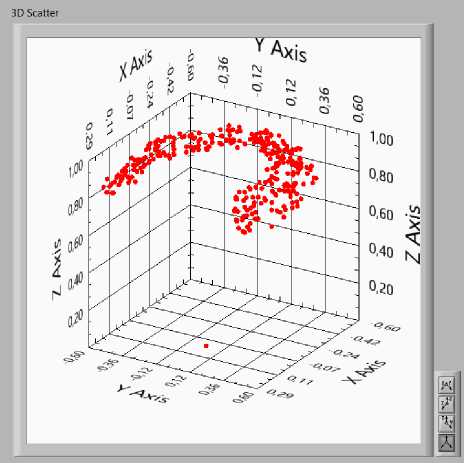
Рис. 10. Обучающий набор
Стандартным этапом работы с ИНС является этап обучения, в ходе которого ИНС настраивает матрицы весовых коэффициентов и другие внутренние переменные в соответствии с обучающим набором данных (известными векторами входных и выходных сигналов). Полный проход ИНС по всем векторам входных сигналов называется эпохой обучения. Цель обучения ИНС – последующее адекватное формирование выходного сигнала при эксплуатации ИНС с минимальным его отклонением от требуемого значения при любых возможных векторах входных сигналов. В пакете NI Super Simple Neural Networks настройка процесса обучения и этапы обучения представлены в виде диалогового окна в удобном для пользователя виде (рис. 11).
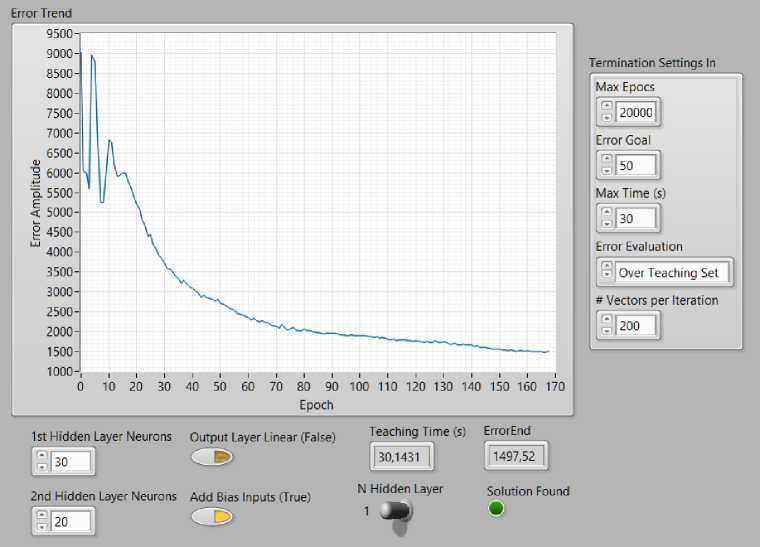
Рис. 11. Процесс обучения ИНС в пакете NI Super Simple Neural Networks
Обучение ИНС проводится путем минимизации среднеквадратической ошибки выхода методом градиентного спуска (алгоритм Левенберга – Марквардта)[3].
На рис. 12 приведено визуальное представление проверочного набора данных, на котором выполнялась верификация работы ИНС.
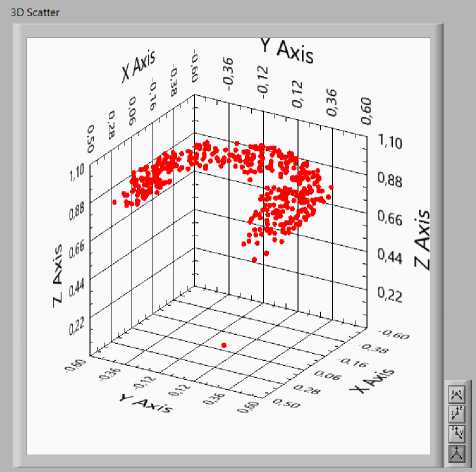
Рис. 12. Проверочный набор для верификации ИНС
Выводы
Проведенное моделирование СУ с контуром контроля положения схвата манипулятора подтверждает принципиальную пригодность использования ИНС для детектирования БРО достаточно сложной формы, для чего можно использовать однослойный либо двухслойный персептрон с 20–30 нейронами.
Аналогичным образом может быть реализована многоконтурная ИНС для контроля за положением промежуточных точек манипулятора (например, точек O 3 , O 5 ) с логическим объединением выходов независимых контуров контроля.
В целом по результатам математического моделирования принято решение о внедрении ИНС в рабочий образец робототехнического комплекса МР-48.
Список литературы Система управления роботом-манипулятором с использованием нейросетевых алгоритмов ограничения рабочей области схвата
- Юревич, Е.И. Основы робототехники/Е.И. Юревич -СПб.: БХВ-Петербург, 2005. -416 с.
- Назаров, А.В. Нейросетевые алгоритмы прогнозированиия и оптимизации систем/А.В. Назаров, А.И. Лоскутов. -СПб.: Наука и техника, 2003. -384 с.
- Application of Neural Networks and Other Learning Technologies in Process Engineering/I.M. Mujtaba, M.A. Hussain (eds.). -Imperial College Press, 2001. -405 p.
