Система векторного управления автономным электроприводом

Автор: Муртазин Т. Э., Шевченко А. А., Титов В. Г.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Электротехника. Транспорт. Технология продовольственных продуктов
Статья в выпуске: 4 т.26, 2023 года.
Бесплатный доступ
Изучение и разработка автономных систем электропривода являются актуальными, поскольку такие системы широко распространены, особенно в отраслях морского и речного флота. Предложена имитационная модель автономного частотно-регулируемого синхронного электропривода с векторным управлением и контуром активной мощности электродвигателя. Приведены результаты моделирования. Совершенствование системы управления направлено на увеличение экономичности, эффективности и надежности автономных электроприводов. Реализация контура активной мощности позволяет эффективно ограничивать потребляемую из генератора мощность, защищая от ее бросков, приводящих к останову дизель-генераторной установки. Регулирование активной мощности на валу более целесообразно для гребных электродвигателей по сравнению с регулированием скорости вращения вала. Создание единой системы управления автономным электроприводом позволяет учитывать взаимное влияние параметров электродвигателя и дизель-генераторной установки, в том числе для более эффективного регулирования напряжения и частоты установки с целью поддержания качества производимой электроэнергии на допустимом уровне. Объединение в единую систему позволит в дальнейшем интегрировать нейронные сети в качестве адаптивных нейросетевых регуляторов и систем-ассистентов. Современное программное обеспечение имитационного моделирования позволяет на этапе проектирования оценивать качество переходных процессов токов, скорости и момента электродвигателя, а также качество энергетических параметров системы электроснабжения. Полученные результаты дают возможность сформировать требования к синхронным машинам, к полупроводниковым элементам силовой части и преобразователям. Результаты моделирования подтверждают правильность настройки контуров регулирования и позволяют говорить о пригодности разработанной модели для инженерных расчетов.
Векторное управление, имитационное моделирование, синхронный электропривод, система автономного электроснабжения, частотное регулирование, vector control, simulation modeling, synchronous electric drive, autonomous power supply system, frequency control
Короткий адрес: https://sciup.org/142238965
IDR: 142238965 | УДК: 621.3.078 | DOI: 10.21443/1560-9278-2023-26-4-449-456
Текст статьи Система векторного управления автономным электроприводом
Муртазин Т. Э. и др. Система векторного управления автономным электроприводом. Вестник МГТУ. 2023. Т. 26, № 4. С. 449–456. DOI:
Murtazin, T. E. et al. 2023. Vector control system for autonomous electric drive. Vestnik of MSTU, 26(4), pp. 449–456. (In Russ.) DOI:
Автономные системы электроприводов находят применение там, где невозможно организовать электроснабжение от основной сети общего назначения, а именно: удаленные сельскохозяйственные предприятия, суда различных отраслей морского и речного флотов, удаленные насосные станции и др. Ввиду ряда преимуществ, таких как экономичность и быстрый ввод в эксплуатацию, наибольшее распространение на сегодняшний день получили установки типа дизель-генератор – двигатель переменного тока ( Алешков и др., 2009; Григорьев и др., 2014 ). Вопросы снижения потребления топлива дизельным двигателем, а также повышения эффективности и надежности электропривода не перестают быть актуальными. При организации электроснабжения потребителей от дизель-генератора, помимо главного электропривода, особенно остро встают вопросы о поддержании надлежащего качества электроэнергии и бесперебойности эксплуатации ( Соколовский, 2006; Тихомиров и др., 2010; Михеев, 2016; Терехов и др., 2005 ).
В статье рассматриваются вопросы имитационного математического моделирования единой системы управления автономным частотно-регулируемым синхронным электроприводом с контуром активной мощности и стабилизацией напряжения генератора.
Материалы и методы
ГОСТ 32144-20131 устанавливает общие требования к предельно-допустимым длительным отклонениям величины и частоты питающего напряжения: ±2 % от номинального значения для частоты и ±10 % от номинального значения для амплитуды. Вместе с тем кратковременный скачок частоты допускается в пределах ±10 % от номинального значения.
Также необходимо учитывать, что превышение потребляемой из генератора мощности свыше 105–110 % от номинального уровня может привести к перегрузке агрегата, снижению срока эксплуатации из-за длительной работы на предельных режимах, существенному расходу топлива. При этом из-за большого превышения может произойти останов дизельного двигателя. Таким образом, система управления должна поддерживать скорость вращения дизельного двигателя и напряжение на обмотке возбуждения на номинальном значении для поддержания частоты и амплитуды выходного напряжения соответственно. Для ограничения и регулирования потребляемой электроприводом мощности предлагается использование векторного управления синхронным электродвигателем с контуром мощности. Возможности векторного управления позволяют вычислять момент без применения сложных систем датчиков ( Фролов и др., 2018; Калачев, 2013 ). Для этого необходимо знать лишь потокосцепление ротора, которое остается постоянным для синхронных двигателей с постоянными магнитами на роторе, и значение проекции тока статора на ось q , которое определяется путем координатных преобразований сигналов с датчиков тока статора. Иными словами, при помощи датчиков тока и положения можно вычислить активную мощность на валу и сигнал обратной связи на регулятор мощности.
Составление имитационной модели и моделирование будет производиться в ПО Matlab Simulink ( Дьяконов, 2008; 2012 ). Параметры синхронного генератора и синхронного двигателя с постоянными магнитами сведены в таблице. Мощность дизельного двигателя равна 7 000 кВт.
Таблица. Параметры электрических машин
Table. Parameters of electric machines
|
Синхронный генератор |
Синхронный двигатель |
||
|
Параметр |
Значение |
Параметр |
Значение |
|
Номинальная мощность, S , ВА |
6 500 000 |
Номинальная мощность, S , ВА |
5 150 000 |
|
Номинальное линейное напряжение, U n , В |
6 300 |
Номинальное линейное напряжение, U n , В |
6 300 |
|
Номинальная частота напряжения, f , Гц |
50 |
Номинальная частота питающего напряжения, f , Гц |
50 |
|
Число пар полюсов, p |
2 |
Тип возбуждения |
постоянные магниты |
|
Номинальная скорость, n , об/мин |
1 500 |
Число пар полюсов, p |
5 |
|
Тип ротора |
явнополюсный |
Форма обратной ЭДС |
синусоидальная |
|
Активное сопротивление фазы статора R s , Ом |
0,0164 |
Тип ротора |
неявнополюсный |
1 ГОСТ 32144-2013. Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего назначения. M., 2014.
|
Индуктивное сопротивление X d , о.е. |
1,856 |
Активное сопротивление фазы статора Rs , Ом |
0,093 |
|
Индуктивное сопротивление X d ', о.е. |
0,242 |
Индуктивность фазы статора Ls , Гн |
0,002 |
|
Индуктивное сопротивление X d '', о.е. |
0,168 |
Момент инерции ротора, J , кг·м2 |
3 781 |
|
Индуктивное сопротивление X q , о.е. |
1,375 |
||
|
Индуктивное сопротивление X q '', о.е. |
0,195 |
||
|
Индуктивное сопротивление X l , о.е. |
0,13 |
На основе представленных параметров и выше обозначенных особенностей системы управления разработана математическая имитационная модель (рис. 1).
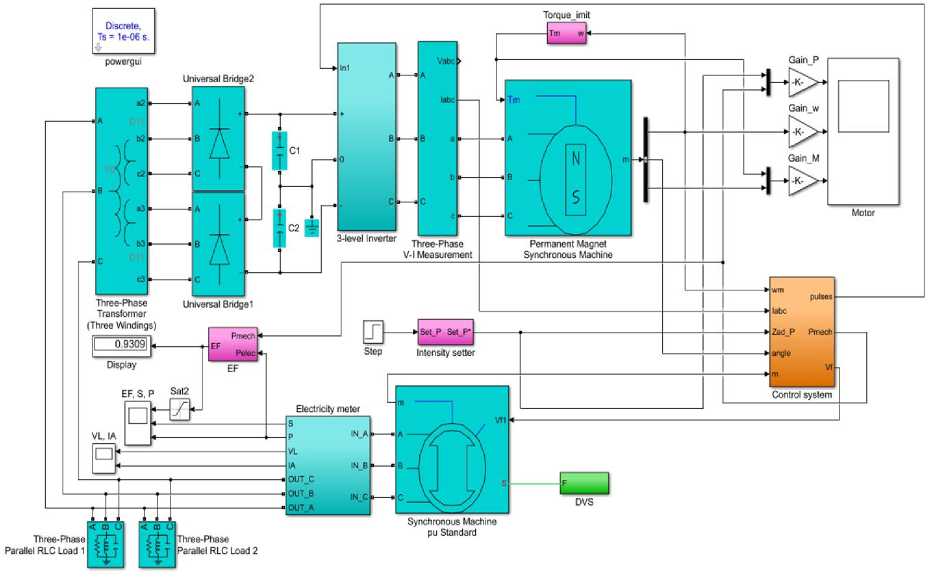
Рис. 1. Модель автономной системы синхронного электропривода Fig. 1. Model of an autonomous synchronous electric drive system
Блок 3-level Inverter, построенный на базе IGBT транзисторов, получает питание от синхронного генератора Synchronous Machine pu Standard через выпрямители Universal Bridge, которые подключены к обмоткам понижающего трансформатора с расщепленной обмоткой. Затем через блок измерений Three-Phase V-I Measurement напряжение поступает на двигатель. Блок Electricity meter рассчитывает потребляемую из генератора полную и активную мощность, а также действующие значения потребляемого напряжения и тока.
С помощью элемента Bus selector и осциллографа Motor будем наблюдать за сигналами двигателя. Блок Torque simulation имитирует на валу двигателя центробежную нагрузку. Блок EF рассчитывает КПД электропривода и выводит значение на элемент Display. Механическая мощность на вход синхронного генератора приходит с блока DVS, в котором реализована система стабилизации скорости двигателя с ПИ-регулятором (рис. 2).
На рис. 3 представлена внутренняя структура блока Control system.
Блок Excitation System совершает регулирование и стабилизацию напряжения синхронного генератора путем воздействия на напряжение обмотки возбуждения.
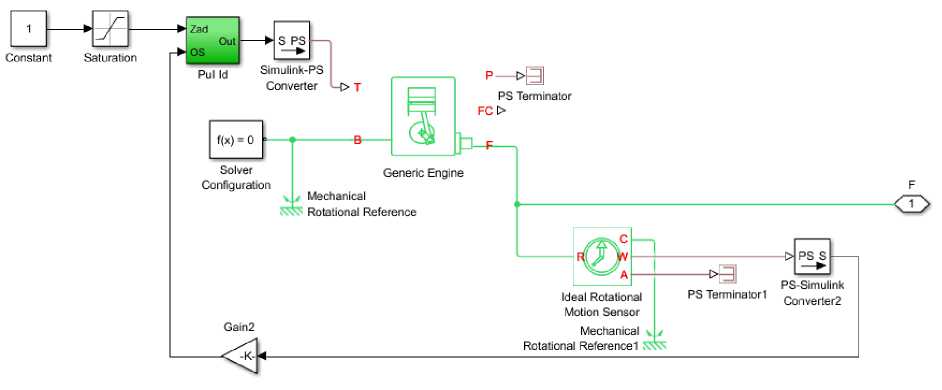
Рис. 2. Структура системы стабилизации скорости дизельного двигателя Fig. 2. Structure of the diesel engine speed stabilization system
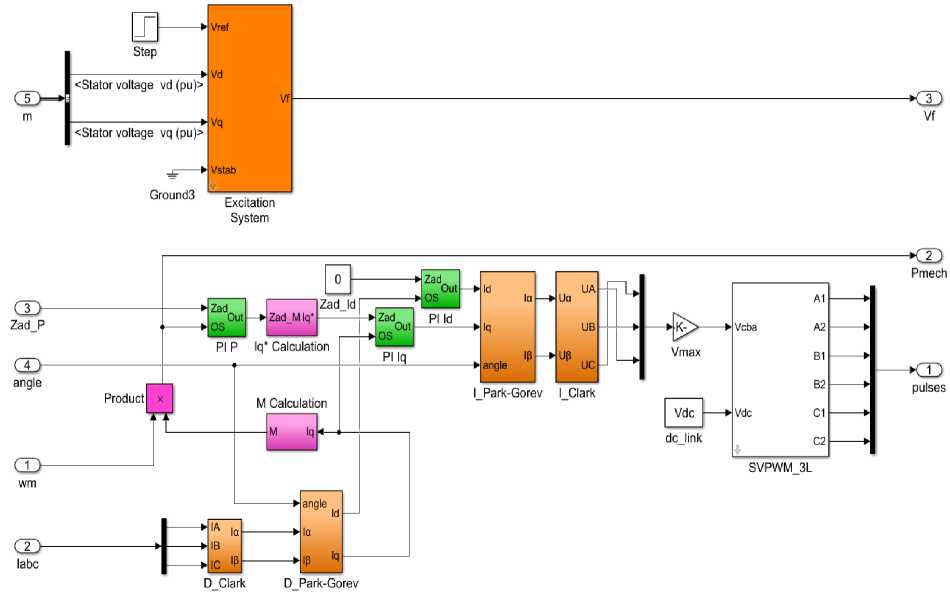
Рис. 3. Структура системы управления Fig. 3. Structure of the control system
Блоки D_Clark, D_Park-Gorev, I_Park-Gorev и I_Clark осуществляют координатные преобразования. Блок Iq* Calculation производит вычисление задания на ток по оси q . Блоки Filter Id и Filter Iq предназначены для фильтрации сигналов обратных связей по току оси d и q соответственно от высокочастотных искажений. Блоки PI Id и PI Iq являются ПИ-регуляторами токов Id и Iq соответственно. Блок РI Р – ПИ-регулятор активной мощности. Блок M Calculation вычисляет момент на валу электродвигателя. Элемент Product вычисляет механическую мощность на валу путем перемножения скорости вращения вала двигателя на электромагнитный момент.
Система управления формирует сигналы напряжения UA, UB и UC. Для реализации данных векторов использован блок ШИМ SVPWM_3L, который на основе этих сигналов подает импульсы частотой 2 кГц на затворы транзисторов инвертора.
Система управления и регулирования построена по подчиненному принципу и имеет два внутренних параллельных контура тока и один внешний контур активной мощности. Если математическое выражение коэффициентов является практически невозможным для такой сложной системы, то можно использовать методы подбора.
При помощи метода Циглера – Никольса2 определяем коэффициенты регуляторов токов и мощности. Номинальные параметры: механическая мощность на валу двигателя – 4 650 000 Вт, скорость вращения – 62,83 рад/с, момент двигателя – 74 000 Нм, напряжение – 6 300 В, ток двигателя – 470 А, полная мощность двигателя – 5 150 000 ВА.
Результаты и обсуждение
Результатом моделирования являются временные диаграммы переходных процессов системы при пуске электродвигателя на центробежную нагрузку с заданием 100 % мощности (рис. 4–6).
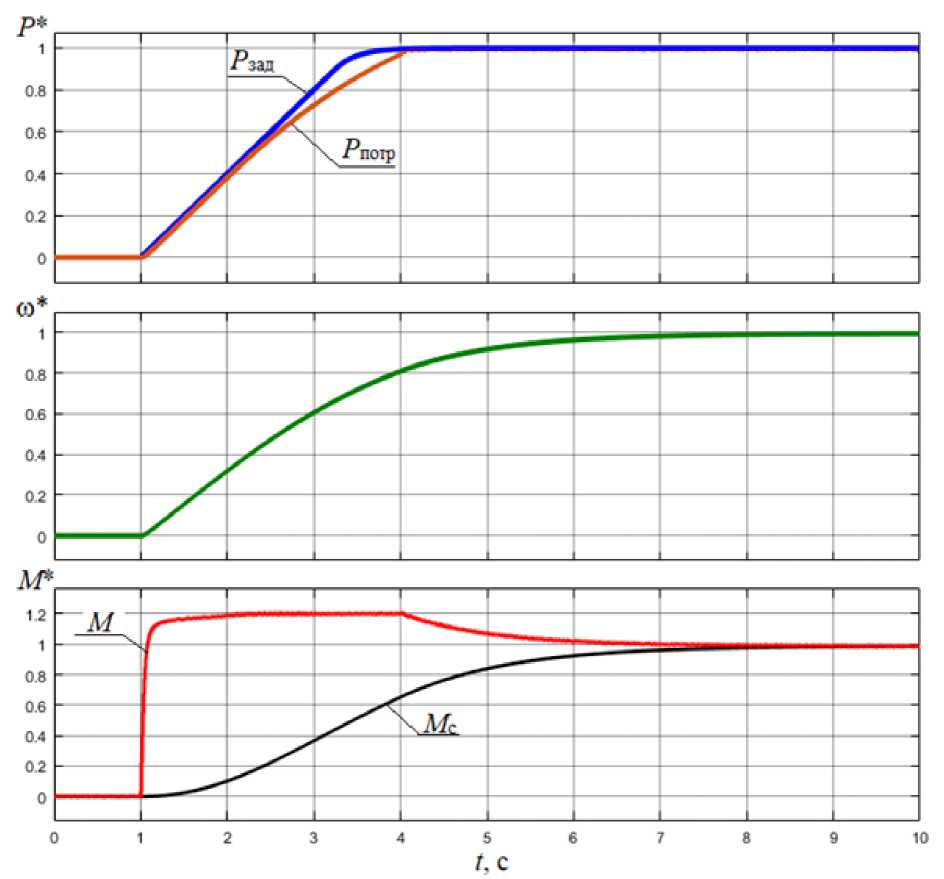
Рис. 4. Переходные процессы синхронного электродвигателя при пуске
Fig. 4. Transients of a synchronous electric motor at start-up
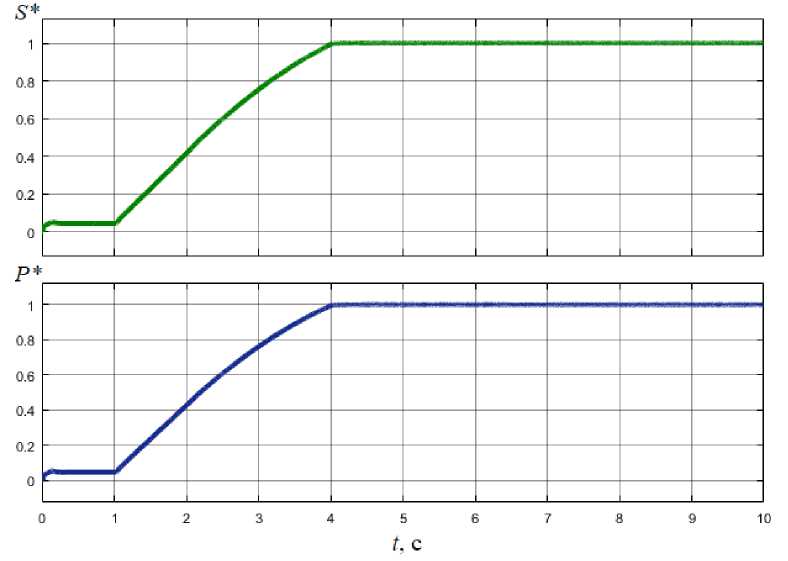
Рис. 5. Переходные процессы энергетических параметров при пуске двигателя Fig. 5. Transients of energy parameters during motor start-up
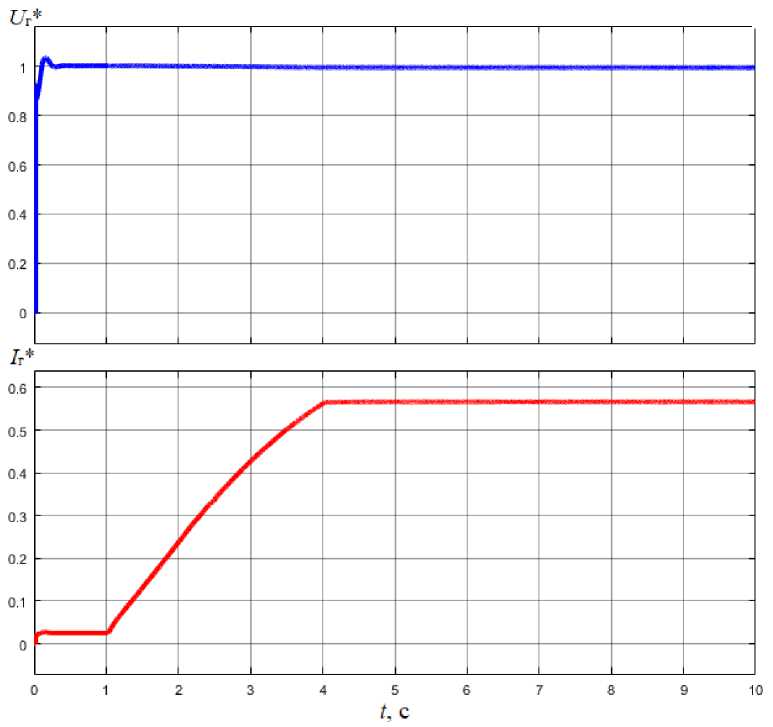
Рис. 6. Переходные процессы синхронного генератора при пуске двигателя
Fig. 6. Transients of the synchronous generator during motor start-up
Из рисунков видно, что активная мощность на валу двигателя с практически отсутствующей динамической ошибкой плавно выходит на установившееся значение без скачков и перерегулирования. Начальный наброс момента электродвигателя практически не повлиял на работу генератора и качество производимой электроэнергии. Потребляемая из генератора мощность также без скачков вышла на установившееся значение, не превышая ограничения в 105 %. По показаниям дисплея видно, что КПД электропривода в установившемся режиме составляет 93,09 %.
Заключение
Анализ результатов моделирования показал, что предложенный вариант автономной системы частотно-регулируемого синхронного электропривода с векторным управлением отвечает заявленным требованиям к энергетическим, механическим и электрическим параметрам. Использование контура активной мощности позволило исключить скачки потребляемой мощности в пусковых режимах, тем самым обеспечив бесперебойность работы и повысив живучесть дизель-генераторной установки.
В дальнейшем планируется интегрировать в предложенную единую систему управления нейронные сети в качестве адаптивных нейросетевых регуляторов и систем-ассистентов.
