Системы с переменной структурой для синхронных реактивных электроприводов с независимым управлением по каналу возбуждения

Автор: Григорьев Максим Анатольевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
В статье дается математическое описание системы электропривода, обращается внимание на то, что синхронный реактивный электропривод с независимым управлением по каналу возбуждения может быть представлен многоканальной системой, в которой структура каждого канала аналогична структуре электропривода постоянного тока. Показано, что контур регулирования электромагнитного момента в синхронных реактивных электроприводах с независимым управлением по каналу возбуждения в области малых скоростей вращения может быть аппроксимирован звеном чистого запаздывания. Настройка электропривода в зоне малых скоростей выполняется регулятором с переменной структурой, параметры которого переключаются в функции знаков сигнала ошибки и ее производной. Такой подход позволил расширить полосу равномерного пропускания частот контура регулирования скорости.
Синхронный реактивных электропривод с независимым управлением по каналу возбуждения, метод конечных элементов, частотные характеристики, структуры управления
Короткий адрес: https://sciup.org/147158247
IDR: 147158247 | УДК: 62-83:621.313.3
Control system of the electric drive with field regulated reluctance machine
This article gives a mathematical description of the electric drive system, gives a notice that field regulated reluctance machine can be assumed as a muiti-channei system in which each channel structure is similar to the structure of the direct current electric drive. It is shown that electromagnetic torque control loop in the field regulated reluctance motor drives at low rotation speeds can be approximated by a pure delay element. The electric drive setup in the area of low speeds is made by a variable structure controller. Its parameters are switched with the function of the error signal signs and its derivative. This approach allowed us to expand the frequency bandwidth of the speed loop.
Текст научной статьи Системы с переменной структурой для синхронных реактивных электроприводов с независимым управлением по каналу возбуждения
Введение. В настоящее время наибольший прогресс наблюдается в современных регулируемых электроприводах переменного тока с новыми типами электрических машин. Одним из примеров служит синхронный реактивный электропривод с независимым управлением по каналу возбуждения (СРМНВ) [1-10]. В многофазном СРМНВ каждая фаза m -фазной обмотки имеет m магнитных связей, поэтому при математическом описании системы требуется учет распределенного характера магнитной системы.
Математическая модель . На рис. 1 дана обобщенная структурная схема электропривода. Здесь в модуле «Модель магнитной системы
СРМНВ» выполняется расчет электромагнитного момента на основании уравнений Максвелла, записанных для элементов магнитной системы. На вход модуля подается в общем случае i токов по количеству фаз в электрической машине.
Статорные обмотки СРМНВ c активными сопротивлениями r 1… r i и индуктивностями L 1… Li питались от соответствующих независимых регулируемых источников ЭДС (ВП1…ВП i ), охваченных отрицательными обратными связями по току. В модели источники ЭДС принимались идеальными непрерывными звеньями с полосой равномерного пропускания частот, равной бесконечности. Правомерность такой замены обосновывается в
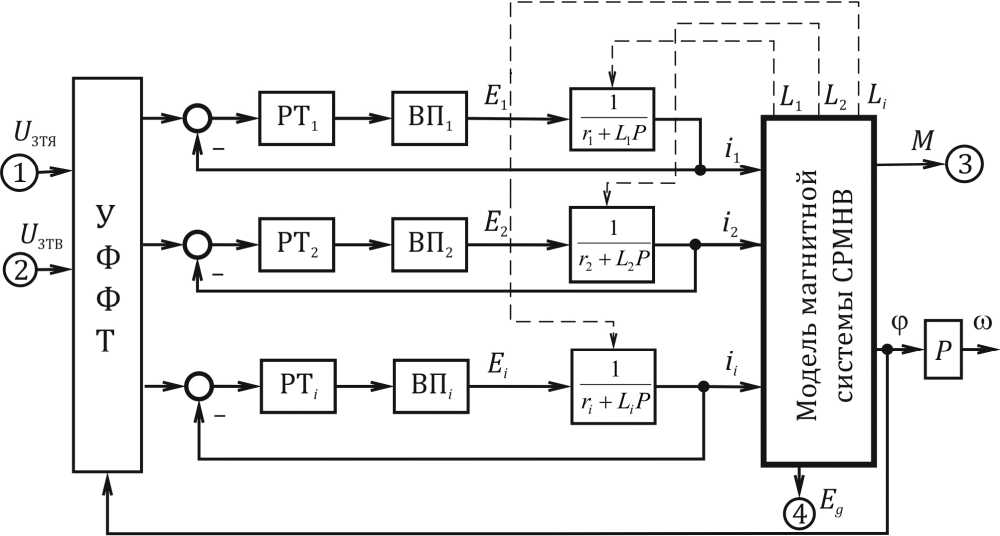
Рис. 1. Обобщенная структурная схема электропривода с СРМНВ
* Работа выполнялась в рамках реализации Соглашения № 16.120.11.6780-МК от 01 февраля 2012 г. (Грант Президента РФ).
[10]. Контуры регулирования фазных токов настраивались соответствующими регуляторами тока РТ1…РT i . Частоты среза контуров регулирования фазных токов были установлены на 1000 рад/с, что обусловлено реальными возможностями современной преобразовательной техники. Задание тока якорных обмоток U ЗТЯ подаётся из узла 1 через узел формирования фазных токов (УФФТ) (рис. 1). Задание на ток возбуждения U ЗТВ подаётся из узла 2 на входе УФФТ. Узел формирования фазных токов переключает сигналы с узлов 1 и 2 на управляющие входы соответствующих контуров регулирования тока по сигналам датчика положения ротора ^, который выходит из блока «Модель магнитной системы СРМНВ». Cигнал i зад1 (рис. 2) на выходе узла формирования фазных токов изменяется в функции угла поворота и имеет прямоугольную форму [4]. Остальные сигналы по форме совпадают с сигналом i зад1 , но сдвинуты друг относительно друга на 180/ m электрических градусов, где m – количество фаз электрической машины. Контуры регулирования фазных токов, УФФТ были реализованы в программе Ansys Sim-plorer .
На рис. 2, а дана схема снятия частотной характеристики. Исследования выполнялись на математической модели. В первом случае контуры фазных токов принимались безынерционными. Внешний контур скорости позволял стабилизировать скорость электропривода. Во втором случае контуры фазных токов принимались реальными с частотой среза 1000 рад/с (см. рис. 1).
На рис. 2, б даны результаты исследований. Анализ частотной характеристики электропривода с реальными источниками тока показал, что влиянием межфазных магнитных связей на работу отдельного контура регулирования тока можно пренебречь, а настройку каждого контура можно вести так же, как и в электроприводе постоянного тока. В этом случае электропривод с СРМНВ может рассматриваться как многоканальная схема с числом каналов, равным количеству фаз. Анализ контура регулирования момента показал, что даже при питании электропривода от идеальных источников тока наблюдается «завал» частотной характеристики на частоте, близкой к 1000 рад/с.
В [11–13] установлено, что при работе электропривода в функции положения ротора СРМНВ работает на семействе угловых характеристик. По аналогии с тиристорными преобразователями постоянного тока, идеальный электропривод с СРМНВ имеющий конечное число фаз, может быть аппроксимирован звеном чистого запаздывания. Постоянная времени чистого запаздывания будет зависеть от числа фаз, количества полюсов машины и частоты питания. Несущая частота f ' определяется по выражению:
f' = / • f, 2pm где z – число пазов в электрической машине; p – количество полюсов ротора, f – частота питания фазных обмоток статора СРМНВ.
Частотные характеристики контура регулирования электромагнитного момента по каналу «вход – сигнал задания на момент, выход – электромагнитный момент» двигателя зависят от числа фаз. В двухфазном электроприводе с СРМНВ по аналогии с однофазным двухполупериодным диодным выпрямителем статическая моментная характеристика представляет собой пульсирующий момент, который сначала увеличивается от нуля до максимума, затем снижается до нуля.
Классические методы теории автоматического управления не позволяют преодолеть постоянную времени чистого запаздывания.
Синтез структур управления. Классические подходы к синтезу системы управления электро-
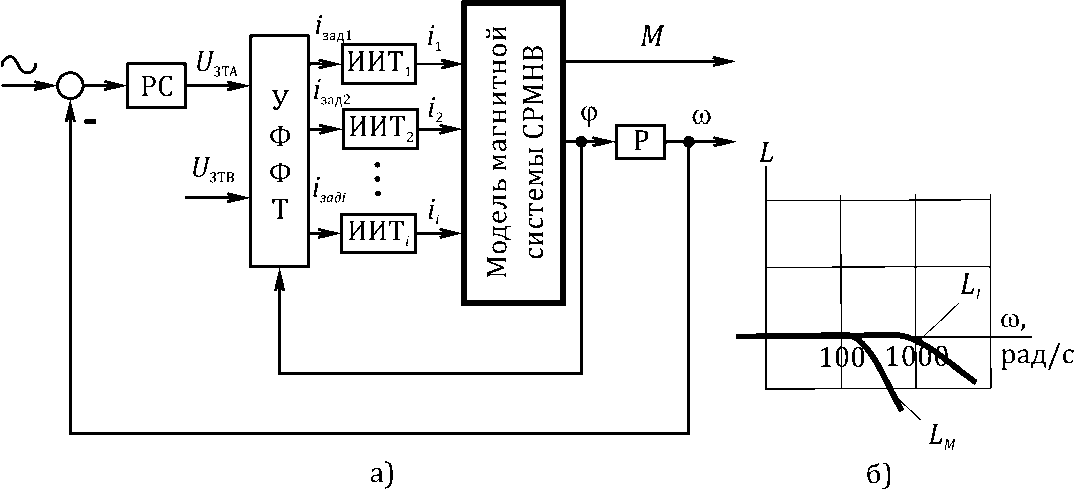
Рис. 2. Структурная схема электропривода с СРМНВ, питающейся от идеальных источников тока (а), амплитудные частотные характеристики контуров регулирования тока L i и момента L M
а)
б)
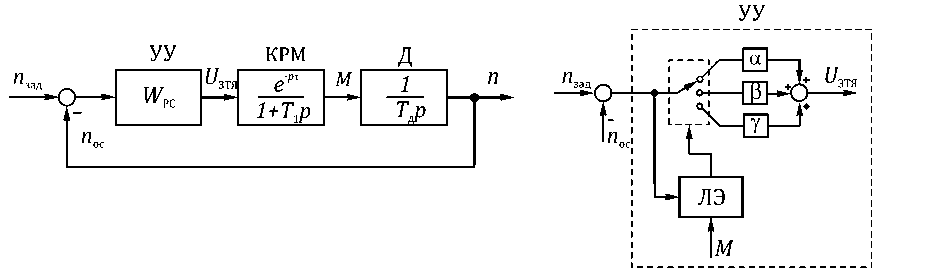
Рис. 3. Структурная схема системы (а), регулятор скорости с переменной структурой (б)
привода, содержащей звенья чистого запаздывания, ограничивают контурный коэффициент регулятора, так как при больших значениях коэффициента передачи снижается «запас устойчивости» или система становится неустойчивой.
Существуют подходы, позволяющие ввести в структуру функциональные элементы, которые во время протекания процесса управления изменяют знак обратной связи и скачкообразно изменяют коэффициенты воздействия. Структуры, в которых параметры корректирующих связей меняются в функции линейной комбинации сигнала ошибки и ее производной ошибки, получили названия систем с переменными параметрами [14].
В системах с переменной структурой выделяют следующие режимы работы: устойчивое вырожденное движение, режим переключений и скользящий режим.
Вырожденное движение в системе получается, если один из корней характеристического уравнения имеет хотя бы один отрицательный корень и устройство управления (регулятор) переводит систему на фазовую траекторию, соответствующую прямой устойчивых траекторий движения [14].
Для режимов переключения и скользящего характерно n -е количество переключений при движении системы по фазовой траектории, при этом для режима переключения n – конечное, а для скользящего режима n – стремится к бесконечности.
Как известно, в системах, содержащих звенья чистого запаздывания, не удается расширить полосу равномерного пропускания за пределы постоянной чистого запаздывания. В системах с переменной структурой полностью компенсировать влияние звена чистого запаздывания не удается, но можно расширить диапазон равномерного пропускания частот.
На рис. 3, а дана упрощенная структура управления электроприводом с СРМНВ: КРМ – контур регулирования момента – был аппроксимирован последовательным соединением звена чистого запаздывания с постоянной времени τ и апериодического звена с постоянной времени T 1; звеном Д, учитывается механическая инерция двигателя;
УУ – последовательное корректирующее устройство с переключающейся структурой W РС . На рис. 3, б дана структура регулятора, коэффициент передачи которого зависит от линейной комбинации сигнала ошибки и ее производной (в нашем случае, от величины электромагнитного момента).
Регулятор УУ имеет переменную структуру: принимает значение α>0, когда произведение сигнала ошибки и ее производной ( М ) больше нуля; принимает значение β<0, когда произведение сигнала ошибки и ее производной отрицательное и γ– на заключительном этапе переходного процесса.
На рис. 4 показана картина переходного процесса скорости v ( n ) в электроприводе, вызванного приложением момента сопротивления. На первом участке 0< t <1,8 – регулятор скорости имеет коэффициент α, на участке 1,8< t <3 структура регулятора переключается и передаточная функция принимает значение β; на последнем участке при t>3 регулятор скорости имеет коэффициент передачи γ. Несмотря на колебательный характер переходной функции, система остается устойчивой [15–17].
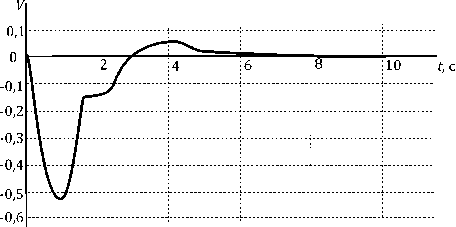
Рис. 4. Переходный процесс скорости v ( n )
Заключение. Установлено, что синхронные электроприводы, в которых оптимальной является прямоугольная диаграмма токов, могут быть аппроксимированы в контуре регулирования момента звеном чистого запаздывания.
Применение регуляторов с переменной структурой позволяет расширить полосу равномерного пропускания частот в контуре регулирования скорости примерно в 2 раза.
Список литературы Системы с переменной структурой для синхронных реактивных электроприводов с независимым управлением по каналу возбуждения
- Vagati, A. Advanced Motor Technologies: Synchronous Motors and Drives/A. Vagati//IEEE Transactions on applications. -1997. -P. 223-227.
- Law, J. Magnetic Circuit Modeling of the Field Regulated Reluctance Machine, Part I: Model Development/J. Law, T. Busch, T. Lipo//IEEE Transaction on Energy Conversion. -1996. -№ 1. -Vol. 11. -P. 49-55.
- Lipo, T. Advanced Motor Technologies: Converter Fed Machines/T. Lipo//IEEE Transactions on Applications. -1997. -№ 7. -P. 204-222.
- Усынин, Ю.С. Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электричество. -№ 3. -2007. -С. 21-26.
- Усынин, Ю. С. Вентильный электропривод с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электротехника. -2013. -№ 3.-С. 37-43.
- Пат. 2422972 Российская Федерация, МПК H 02 К 19/10, H 02 К 19/24, H 02 К 29/03. Синхронная реактивная машина/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин, А.Н. Шишков, А.Е. Бычков, А.В. Валов. -№ 2009146987/07(066958) заявл. 17.12.2009; опубл. 27.06.2011, Бюл. № 18.
- Пат. 2408972 Российская Федерация, МПК H 02 Р 27/04, H 02 Р 25/08, H 02 Р 19/10. Электропривод с синхронной реактивной машиной и способ управления им/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, и др. -№ 2009148381/07(071468) заявл. 24.12.2009; опубл. 10.01.2011, Бюл. №1.
- Григорьев, М.А. Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев//Вестник ЮУрГУ. Серия «Энергетика». -2009. -Вып. 12. -№ 34(167). -С. 51-55.
- Параметрическая оптимизация частотно-регулируемых электроприводов/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37(296). -С. 30-33.
- Усынин, Ю.С. Частотные характеристики канала регулирования момента в синхронных электроприводах/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электричество. -2012. -№ 4. -С. 54-59.
- The Losses in Control Electric Drives of Transport Mechanisms at Different Controlled Laws/Yu.S. Usinin, M.A. Grigorjev, A.N. Shishkov et al.//SAE 2011 World Congress and Exhibition; Detroit, MI;12 April 2011through12 April 2011; Code85351 DOI: 10.42 71/2011-01-0039.
- Электроприводы с синхронной реактивной машиной независимого возбуждения для станов холодной прокатки труб/Ю. С. Усынин, С.П. Лохов, М.А. Григорьев, Е.В. Белоусов//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 17. -№ 16(275). -C. 107-110.
- Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37(296). -C. 38-41.
- Емельянов, С.В. Системы автоматического управления с переменной структурой: учебник/С.В. Емельянов. -М.: Наука, 1967. -336 с.
- Дудкин, М.М. Однофазные обратимые преобразователи напряжения для улучшения качества электрической энергии в сетях ограниченной мощности/М.М. Дудкин//Практическая силовая электроника. -2012. -№ 2 (46). -C. 19-27.
- Дудкин, М.М. Динамические спектральные характеристики развертывающих преобразователей с широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Практическая силовая электроника. -2012. -№ 4 (48). -С. 49-55.
- Адаптивная интервало-кодовая двоичнодесятичная интегрирующая синхронизация систем управления силовыми вентильными преобразователями/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, Р.М. Рахматулин//Электротехника. -2013. -№ 3. -С. 8-15.
