Системы согласованного вращения асинхронных двигателей

Автор: Гаврилова Светлана Владимировна, Доманов Андрей Викторович, Доманов Виктор Иванович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 2-4 т.17, 2015 года.
Бесплатный доступ
В работе рассматривается схема двух электроприводов, согласованных параметрически по скорости вращения. В качестве исполнительных предлагается использовать двухскоростные асинхронные двигатели. Для согласованной работы электроприводов используются свободные группы обмоток двигателей. Определены передаточные функции основных звеньев системы, синтезирована структура согласованного вращения. Составлена модель и получены графики переходных процессов исследуемой системы.
Параметрическое управление, двухскоростной асинхронный двигатель, согласованное вращение, передаточная функция, переходный процесс
Короткий адрес: https://sciup.org/148203652
IDR: 148203652 | УДК: 621.316.728
Systems of asynchronous engines coordinated rotation
In work the scheme of two electric drives coordinated parametrically on rotation speed is considered. As executive it is offered to use 2-speed asynchronous engines. For the coordinated work of electric drives free groups of engines windings are used. Transfer functions of system main links are defined, the structure of the coordinated rotation is synthesized. The model is made and schedules of transition processes of the studied system are received.
Текст научной статьи Системы согласованного вращения асинхронных двигателей
диапазон регулирования и высокая точность. Для этого необходимо использовать регулируемые преобразователи и датчики координат, в частности датчики скорости. В то же время существует большая группа электроприводов, в которой не требуется широкого диапазона регулирования и высокой точности. В этом случае целесообразнее использовать параметрические СЭП, они более просты и не требуют использования преобразователей и дополнительных датчиков. В [5] была предложена схема параметрического управления двухскоростного асинхронного двигателя с короткозамкнутым ротором (ДСАД). Для этого обмотки статора ДСАД разделялись на две независимые и равноценные группы, каждая из которых соединяется в звезду. Первая группа обмоток подключается к сети. При этом ЭДС на второй (свободной) группе обмоток пропорциональна скорости вращения. ДСАД в таком включении можно использовать для создания СЭП, согласованных по скорости. Схема включения обмоток электрических машин, входящих в эту систему, приведена на рис. 1.
При совпадении скоростей вращения двигателей (n1=n2) ЭДС на свободных обмотках так же будут равны (E1=E2). В этом случае токи по линиям связи между обмотками ω1.2 и ω2.2 не протекают. Если n1 ≠n2, то и E1≠E2 и по линиям связи начинают протекать уравнительные токи. Для двигателя с большей скоростью вращения ротора эти токи будут создавать тормозящий момент, а для другого – двигательный. Таким образом, создаваемые моменты будут действовать как согласующие. Такая схема имеет высокую надежность, низкую стоимость, проста в наладке и обслуживании. Отличительной особенностью работы рассматриваемой схемы является независимость согласующего момента от скорости, так как он зависит только от абсолютной разности скоростей вращения.
вании напряжения АД присутствуют слабозатухающие колебания момента и скорости. В этом случае передаточную функцию АД можно приближенно представить в виде [7]:
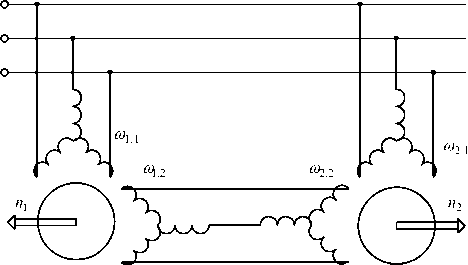
Рис. 1. Схема включения обмоток машин системы
W АД ( Р ) =
A M д ( p ) A U 1 ( p )
K
( T p + 1)( T 2 p 2 + 2 / 1 T o p + 1)
,
где Т 1 – постоянная времени, характеризующая апериодическую составляющую момента; Т 0 – постоянная времени затухания периодической составляющей, γ 1 – коэффициент демпфирования.
На структурной схеме (рис. 2)
W АД ( p ) = W ( p) = W 2 ( p ) = W 3 ( Г ) = W 4 ( Г)
Рассмотрим динамику работы такой СЭП. Переходные процессы согласования скоростей вызваны различием ЭДС на свободных обмотках двигателей. Это позволяет сделать вывод, что работа схемы аналогична системе управления АД изменением напряжения на статоре [1,3,6]. На основании этого составим структурную схему системы согласованного по скорости вращения АД (рис. 2).
Передаточная функция, связывающая момент и скорость с учетом вентиляторной нагрузки имеет вид
W m ( p ) =
K M
T m p + 1
Соответственно на структурной схеме
W m ( p ) = W5(p ) = W 6( p )
.
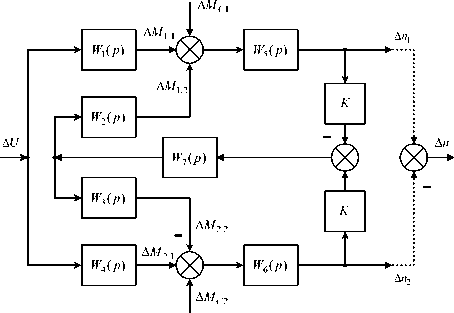
Рис. 2. Структурная схема системы согласованного по скорости вращения АД
На свободных обмотках ДСАД наводятся ЭДС Е 1 и Е 2 , пропорциональные скоростям n 1 и n 2 , на схеме это звенья с коэффициентами K . Разность ЭДС приводит к появлению уравнительного тока, протекающего через свободные обмотки двигателей. При этом внутренние падения напряжения на обмотках и их постоянные времени учитываются звеном
W 7( p ) =
K 7
T 7 p + 1
Анализ такой системы из-за сложности описания АД затруднен. При пуске и регулиро-
Считаем, что система работает в установившемся режиме n 1 = n 2 и E 1.2 = E 2.2 . Кроме этого принимаем, что ТМх = ТМг . При этом схема становится полностью симметричной по отношению к выходным координатам Δ n 1 и Δ n 2 . Определим передаточную функцию:
W „ 1 ( p ) =
A n 1 ( p )/
/ A M c 1( p )
w 1 + W 2 ( p ) W 5( p )W 7( p ) • K
51 p) 1 + 2 • W 2 ( p ) W 5 ( p )W 7( p ) • K
На основании структурной схемы (рис. 2) была составлена модель системы согласованного вращения. На рис. 3 приведены результаты моделирования. За первую секунду происходит разгон двух двигателей, при этом n1=n. В момент t= 1 сек возрастает момент на первом двигателе и скорость n1 снижается. Одновременно с этим происходит снижение n2. На этом же графике приведено значение ΔU.
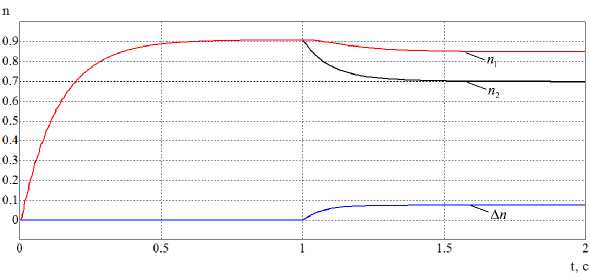
Рис. 3. Переходные процессы пуска и наброса нагрузки на первый двигатель
Для сравнения было проведено моделирование этой же схемы без компенсирующих связей (рис. 4). Видно, что скорость n 2 не изменяется, а снижение n 1 более существенно. В то же время анализ уравнения (1) и полученных переходных процессов показывает, что рассматриваемая система – статическая. Поэтому для более полной компенсации Δ n = n 1 – n 2 необходимо увеличить коэффициент в контуре компенсации.
Следующим шагом осуществляем пуск двухдвигательной системы с условием, что моменты инерции различаются в два раза. Из осциллограмм (рис. 5) можно сделать вывод, что есть различия для режима пуска, а наброс нагрузки отрабатывается так же, как и в первом случае.
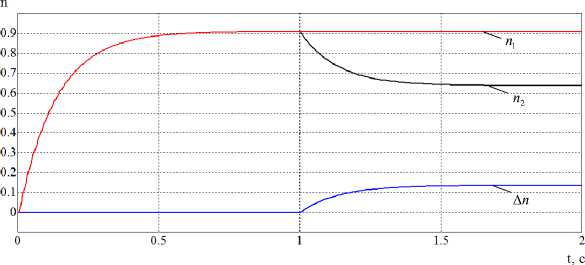
Рис. 4. Переходные процессы пуска и наброса нагрузки на первый двигатель при обрыве цепи синхрониз ации
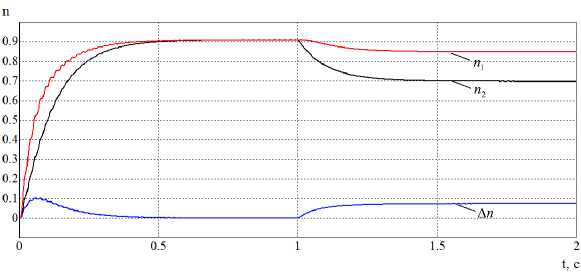
Рис. 5. Переходные процессы пуска и наброса нагрузки для электроприводов с разными значениями момента нагрузки
В подобных электроприводах необходимо решить две задачи:
-
- создать систему с минимальными статическими ошибками Δ n 1 и Δ n 2 при действии моментов нагрузки Δ M C 1 и Δ M C 2 ;
-
- выполнить настройку таким образом, чтобы Δn = Δ n 1 – Δn 2 была минимальной.
Выполнение первой задачи косвенно решает и вторую – чем меньше статические ошибки электроприводов системы, тем меньше разность этих ошибок. Для снижения статических ошибок увеличивают контурный коэффициент системы и применяют дополнительные корректирующие связи. Это говорит о том, что только параметрическими методами эту задачу решить нельзя. В то же время, если приоритетной является вторая задача без условия минимизации ошибок отдельных электроприводов, возможно решение на основе параметрических систем регулирования. Для этого найдем передаточную функцию
W . n ( P ) =
A n ( p ) A M 1 ( p )
Она может быть вычислена по выражению
W a n ( P ) = W n 1 ( P ) - W n 2 < P )
,
A n 2 ( p )
где W nx (p ) определена ранее (1), W n 2( p ) = ^ ^ - передаточная функция изменения скорости второго электропривода при изменении момента на первом имеет вид
W n 2 ( P ) =
W ( p Ж( p ) W 7( p ) KW ( P )
1 + KW 1 ( p Ж( p ) W 7( p )
В соответствии с выражением (2) получаем
W a „ (P ) = W n 1 ( P ) - W „ 1 ( P ) K
W i ( p )W ;( p )W , (p ) 1 + KW 1 ( p )W ;( p )W , ( p )
= W ( p )----------1---------
1^ 1 + KW ( p )W ; ( p )W , ( p )
W 5 ( P )
1 + 2W 1 ( p )W ;( p )W7( p ) K ( 3)
Анализ для статического режима выражения (3) показывает, что Δ n будет минимальным при условиях
Kx, К-;, K ^ max
K 5 ^ min
При прочих равных условиях K 5 принимает минимальное значение при низких номинальных скоростях двигателя, т.е. в тихоходных машинах.
Выводы:
-
1. Для согласованного по скорости управления можно эффективно использовать ДСАД.
-
2. На основе ДСАД можно создать простые параметрические системы согласованного вращения.
-
3. Наиболее подходящими для подобных систем являются машины с большим числом пар полюсов (тихоходные).
Список литературы Системы согласованного вращения асинхронных двигателей
- Волков, Н.И. Электромашинные устройства автоматики/Н.И. Волков, В.П. Миловзоров. -М.: Высш. шк., 1986. 335 с.
- Доманов, В.И. Параметрическая автоматизация двухскоростного асинхронного двигателя/В.И. Доманов, А.В. Доманов, С.В. Гаврилова//Промышленные АСУ и контроллеры. 2015. №3. С. 3-7.
- Елисеев, В.А. Системы непрерывного управления электроприводов переменного тока. -М.: Мос. энерг. ин-т, 1985. 96 с.
- Ключев, В.И. Теория электропривода. -М.: Энергоатомиздат, 2001. 704 с.
- Морговский, Н.Я. Взаимосвязанные системы электропривода/Н.Я. Морговский, М.Б. Рубашкин, Я.Г. Гольдин. -М.: Энергия, 1972. 204 с.
- Унгру, Ф. Системы согласованного вращения асинхронных электродвигателей/Ф. Унгру, Г. Иордан. -Л.: Энергия, 1971. 182 с.
- Фролов, К.В. Машиностроение. Энциклопедия. Электроприводы/К.В. Фролов и др. -М.: Машиностроение, 2012. Т.IV-2. 520 с.
