Скалярное управление асинхронным короткозамкнутым двигателем по активной составляющей тока статора

Автор: Емельянов Александр Петрович, Чуркин Борис Анатольевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 3 т.14, 2014 года.
Бесплатный доступ
Представлен метод регулирования частоты вращения асинхронного короткозамкнутого электродвигателя, базирующегося на скалярных законах управления с обратными связями. Система обратных связей состоит из двух независимых каналов: канала регулирования частоты и канала регулирования напряжения, основанного на регулировании активной составляющей тока статора. Представленная система управления асинхронным электродвигателем позволяет получить наибольшее быстродействие при скалярном способе управления, сравнимое с классической векторной системой.
Асинхронный двигатель, скалярное управление, частотно-регулируемый электропривод, динамические характеристики, математическое моделирование
Короткий адрес: https://sciup.org/147158278
IDR: 147158278 | УДК: 62-83:621.313.333
Scalar control of squirrel-cage induction motor with stator active current
The paper presents regulation technique for squirrel-cage induction motor speed; the technique is based on scalar feedback control principles. Feedback system consists of two independent paths: frequency regulation path and voltage regulation path based on stator active current regulation. Presented induction motor control system allows of achieving maximum operation speed at scalar control comparable to traditional vector system.
Текст научной статьи Скалярное управление асинхронным короткозамкнутым двигателем по активной составляющей тока статора
Современный частотно-регулируемый электропривод широкого применения состоит из асинхронного короткозамкнутого электродвигателя и статического преобразователя частоты (СПЧ) со звеном постоянного тока. Преобразователь частоты из постоянного напряжения звена постоянного тока формирует напряжение, переменное по частоте и амплитуде. Изменение частоты напряжения и его амплитуды приводит к изменению частоты вращения магнитного поля статора и, как следствие, к изменению скорости вращения вала электродвигателя. В настоящее время известны следующие законы частотного управления асинхронным короткозамкнутым двигателем:
-
• скалярное управление;
-
• векторное управление (FOC);
-
• прямое управление моментом (DTC).
Обычно современные преобразователи частоты дают возможность реализовать несколько законов управления электродвигателем, для этого в них заложено программное переключение известных законов.
Несмотря на успехи в области создания высокодинамичных электроприводов на основе векторного управления (FOC) и DTC, скалярные системы управления не утратили своего значения благодаря простоте реализации и настройки [1, 2]. Скалярные системы управления не требуют определения точных параметров схемы замещения асинхронного двигателя. Схема скалярного управления основана, как правило, на согласованном регулировании частоты и напряжения статора. В качестве входного независимого сигнала принимается задание по частоте. Для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения [3].
В скалярной системе управления оптимальным считается закон регулирования, при котором во всем диапазоне регулирования скорости под- держивается постоянство перегрузочной способности двигателя. При таком регулировании перегрузочная способность, номинальные коэффициент мощности и КПД электродвигателя во всем диапазоне регулирования частоты вращения практически не изменяются. Недостатком данного способа регулирования считается отсутствие возможности точной регулировки частоты вращения вала, так как она зависит от нагрузки. Кроме того, при нагрузках, много меньших, чем номинальные, скалярные системы не позволяют работать электроприводу в наиболее благоприятном режиме, так как напряжение фиксируется на заданном уровне.
Для реализации векторной системы управления или системы управления с DTC необходим либо датчик скорости, встраиваемый в двигатель, либо наблюдатель координат на основе математической модели электродвигателя с использованием точных параметров схемы замещения. Для скалярных систем управления с целью расширения диапазона регулирования тоже применяют датчик скорости.
Ряд фирм выпускают асинхронные электродвигатели специально для работы от преобразователя частоты, в которые встраивают датчик скорости вала двигателя на этапе заводского изготовления. Эти встраиваемые в корпус двигателя датчики частоты вращения (инкрементальные энкодеры) имеют разрешение не менее 1024 метки на оборот. Типовая структурная схема скалярной системы управления [2] частотного регулирования с датчиком скорости представлена на рис. 1.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда, или, по крайней мере, значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для улучшения энергетических показателей целесообразно регу-
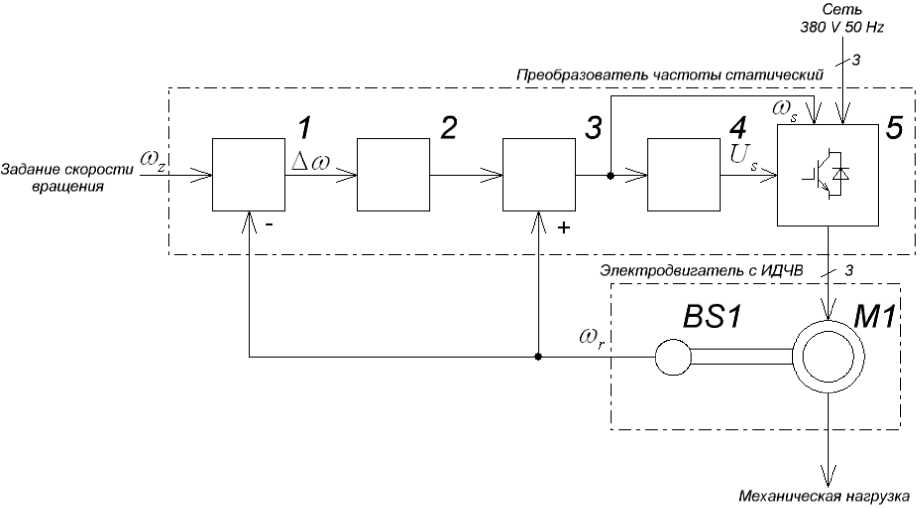
Рис. 1. Схема структурная скалярной системы управления с датчиком скорости : 1 - блок сравнения; 2 – блок регулятора; 3 – блок сумматора; 4 – блок функционального преобразователя; 5 – ШИМ-инвертор на полностью управляемых вентилях; BS1 – инкрементный датчик частоты вращения (ИДЧВ) и угла поворота;
М1 - асинхронный электродвигатель
лировать подводимое к двигателю напряжение в функции нагрузки. Скалярное управление асинхронным двигателем с датчиком скорости, как следует из рис. 1, довольно просто реализуется, но при достаточно низких частотах может произойти значительное снижение момента на валу двигателя. Основным недостатком такого управления является отсутствие возможности регулировать момент на валу двигателя в функции нагрузки. Кроме того, известные системы скалярного управления асинхронным двигателем характеризуются тем, что в них затруднительно осуществить независимое регулирование скорости и момента.
Ряд механизмов работает в условиях резкопеременных нагрузок. Для таких приводов зачастую выдвигаются дополнительные требования, такие как точная отработка скорости с компенсацией скольжения, поддержание заданной величины момента при малых частотах вплоть до нескольких Гц. Кроме того, с целью экономии электроэнергии необходимо регулировать амплитуду напряжения на статоре электродвигателя при малых нагрузках.
Описание
Для осуществления независимого регулирования момента и скорости в скалярной системе управления надо иметь два канала управления – частотой и амплитудой напряжения.
Канал регулирования частоты включает в себя внешний задатчик интенсивности, датчик скорости и регулятор скорости. Выходом регулятора скорости является задание по моменту двигателя. В асинхронном двигателе увеличение электромаг- нитного момента сопровождается увеличением скольжения. На линейном участке механической характеристики момент пропорционален скольжению, поэтому для компенсации скольжения необходимо к заданной частоте прибавить вычисленную частоту скольжения.
Канал регулирования амплитуды напряжения опирается на измерение активной составляющей тока статора. Как видно из схемы замещения фазы статора двигателя (рис. 2), момент двигателя в основном создается активной составляющей тока статора. Регулируя активную составляющую тока статора, мы можем повысить перегрузочную способность электродвигателя во всем диапазоне рабочих частот электропривода.
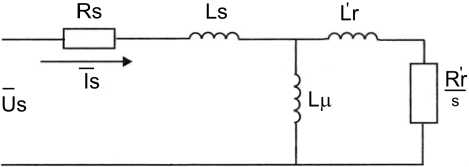
Рис. 2. Схема замещения фазы статора асинхронного электродвигателя
Известно, что каждой нагрузке соответствует определенное напряжение, при котором КПД может оставаться на номинальном уровне. Для управления с минимальными потерями при любой частоте статора необходимо изменять напряжение в соответствии с моментом нагрузки так, чтобы скольжение имело критическое значение [3]. Известна формула для момента двигателя [4]:
M э
mpU s 2 Rr s
‘ \2
Подставив (6) в (5) и, пренебрегая малым зна-
to s
где to s - круговая частота; р - число пар полюсов;
R s , R'r , x s , x'r - параметры схемы замещения; s -
чением Rs , получим:
I nl (toeLK )2 +(tovLK )2 I акт s к
Us = 2toLJK ’ или
Us = KI акт tos ,(8)
скольжение.
Из условия равенства мощностей следует:
M э to r = 3 U s I s cos ф• n , (2)
где M э – электромагнитный момент двигателя;
to r - скорость вала двигателя; U s , I s - напряжение и ток фазы статора; cos ф , п - коэффициент
где K – коэффициент пропорциональности.
Выражение (8) служит основой для организации эффективного управления напряжением в скалярной системе управления. Активный ток вычисляется на основании информации об угловом положении вектора напряжения и измеренных фаз-
мощности и КПД. Активная часть тока определя-
ется как
1 акт I sm cos ф ; I sm I s ^/2 .
Подставив (2) и (3) в (1), получим:
2 R г Б mpUs — to r sl
s
3US 1 акт п .
to s
Учитывая, что P to r « 1, выражение (4) можно to s
ных токах статора.
Вычисление активной составляющей тока статора осуществляется по формуле:
1 акт = I s a cos Y + I s ₽ sin Y , (9)
где y - угловое положение обобщающего вектора напряжения, формируемого системой управления; I s a , I s p - проекции обобщающего вектора тока статора в неподвижной системе координат.
Схема канала управления напряжением на основании (8) и (9) представлена на рис. 3.
переписать:
I акт п
U s
2 RL
s
.
Известно выражение для критического сколь-
жения [3]:
s к = , Rr
J Rs 2 + ( to, LK ) 2
s s к
Результаты исследований
Рассмотренная выше скалярная система управления исследовалась на математической модели в среде MATLAB/Simulink. В схеме модели использовался асинхронный электродвигатель 4A250S4У3 c параметрами, представленными в таблице.
Полная схема модели для исследования предложенной скалярной системы представлена на рис. 4.
На модели исследовались режимы пуска с номинальным моментом, наброс и сброс нагрузки. На рис. 5 представлены графики переходных процессов в электроприводе в режиме пуска с номинальным моментом до частоты 40 Гц. На графиках сверху вниз представлены: ток одной фазы статора,
где L к = Ls + L‘ .
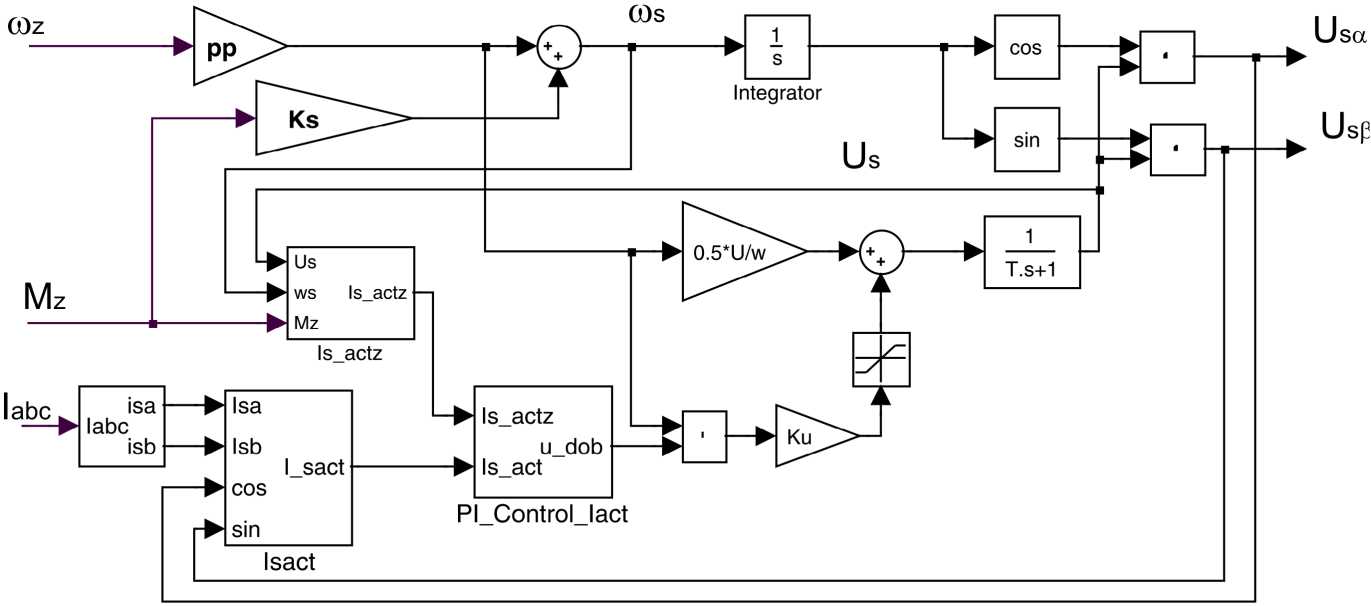
Рис. 3. Канал управления напряжением
Параметры асинхронного электродвигателя 4A250S4У3
|
Номер параметра |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
Наименование |
P n , |
КПД, |
cos φ |
R s , |
R r , |
L s , |
L r , |
L m , |
p |
sn , |
s к, |
J d , |
J Σ , |
|
параметра |
кВт |
% |
Ом |
Ом |
Гн |
Гн |
Гн |
% |
% |
кг·м2 |
кг·м2 |
||
|
Значение параметра |
75 |
93 |
0,9 |
0,0395 |
0,0217 |
0,023 |
0,0231 |
0,0226 |
2 |
1,2 |
9,5 |
1 |
10 |
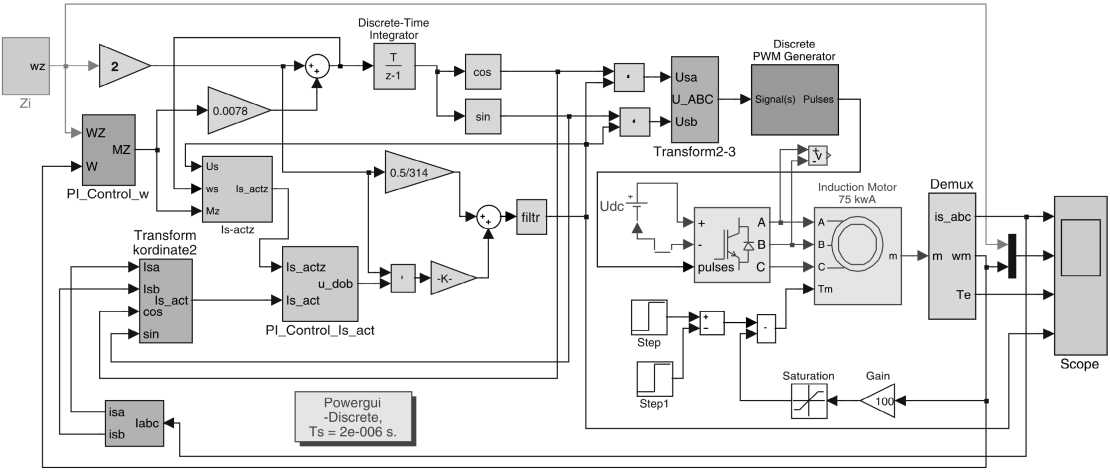
Рис. 4. Схема модели скалярной системы управления с управлением
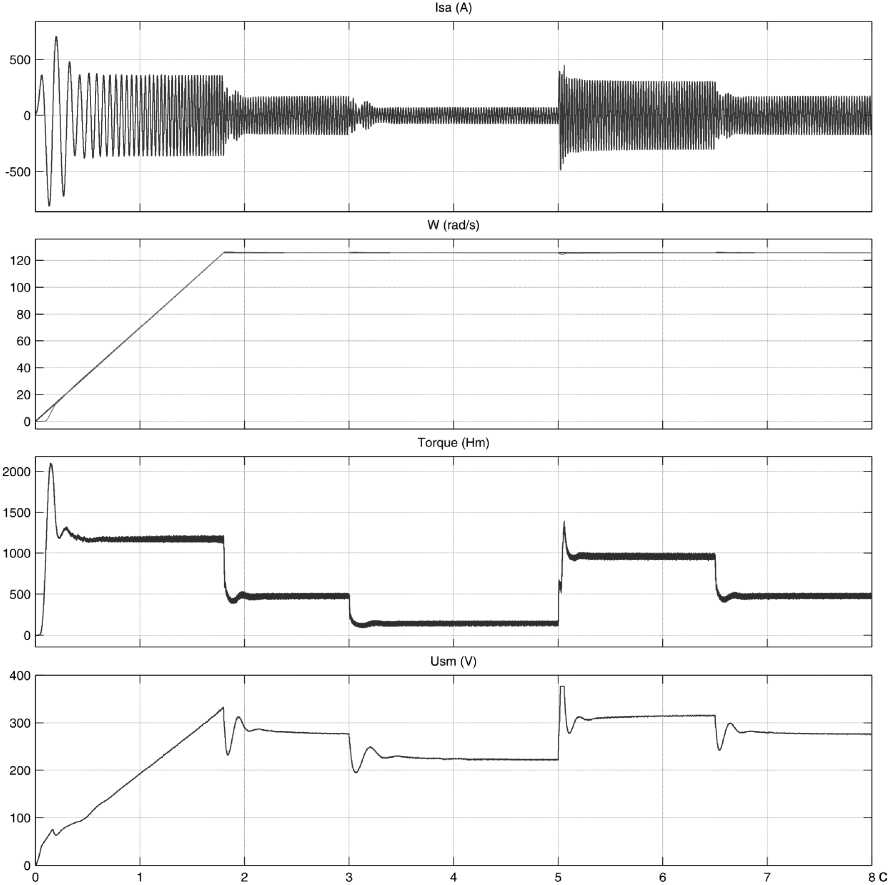
Рис. 5. Пуск электропривода до частоты 40 Гц
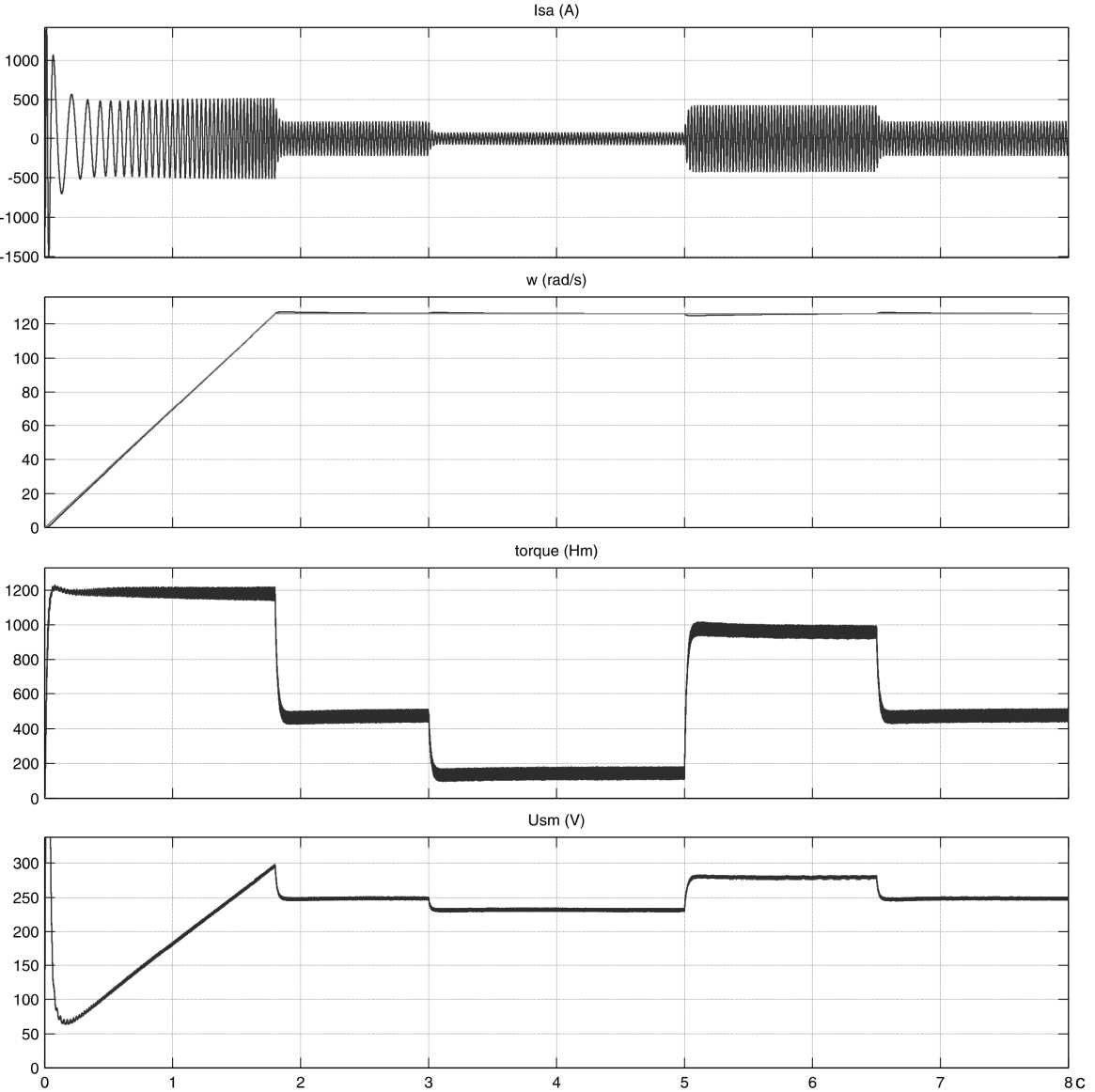
Рис. 6. Пуск электропривода с классической векторной системой управления до частоты 40 Гц
ск ор ос т ь задан н ая и и з м е р е нн ая, момент двигателя и амп литу д н о е зн ачени е нап р яжен ия фазы д виг а т е ля. Пуск ос уществ л я лс я за в ремя 1, 8 с, ч е р е з 3 с п р ои з в о дил ся сброс н агрузк и д о значен и я 0,3 М н , через 5 с н агрузка у в еличивала сь до з начения 2 М н, через 6 с н агр у з ка возвр а щ ал ась к н оминал ь н о му значению.
Н адо от мет ит ь, чт о при ча с т оте ток а с т ато ра 50 Гц и при нагрузке, равной М н , уст ан ав лив а ет ся максимальное напряжение статора.
Д л я с ра в нен и я п ерех одн ых п р оц е сс о в предл о же н но й скаля р ной си сте м ы управл ен и я ( см. рис. 5) с в екто рн ой си с темой упр а вления был о в ып о л н ено и сс ледо в а ни е кл ассичес к о й вектор н ой с и ст е м ы управления с четырьмя ПИ-ре гу л ят о рами, с ори ен т и рова ни ем п о по л ю рот ор а , при т ех же у слов иях пу ск а и на гр у з ки с та ки м ж е э лек т ро дв ига т елем. Результаты моделирования п ри в ед е н ы н а ри с. 6 .
П о с р а в н ени ю с п редло ж енной с к алярной системой (см. рис. 5) переходн ые п р оц е ссы в ве кторной системе управления (см. ри с. 6 ) прот е каю т п лав н о без перерегулир ов ан ия, х о тя по быстр о дей с тв ию и перегруз оч н о й способн о с т и они пра ктически одинаковы.
Заключение
Предложенный скалярный метод регулирования частоты вращения асинхронным двигателем с датчиком скорости позволяет снизить рабочую частоту электропривода до 2 Гц и обеспечить наилучшие показатели системы «электродвигатель – статический преобразователь частоты» во всем частотном диапазоне. Перегрузочная способность электропривода сохраняется во всем диапазоне частот, в том числе и в момент пуска двигателя. Для реализации системы управления не надо знать параметры схемы замещения и тем более их корректировать в процессе работы. По быстродействию предложенная система управления приближается к векторной системе управления, при этом она нечувствительна к температурным изменениям параметров электродвигателя. Данная скалярная система управления может быть применена в горной промышленности для электропривода транспортеров, комбайнов, подъемных механизмов и др., а также в качестве гребного электропривода.
Список литературы Скалярное управление асинхронным короткозамкнутым двигателем по активной составляющей тока статора
- Булгаков, А.А. Частотное управление асинхронными двигателям/А.А. Булгаков. -М.: Энергоиздат, 1982. -216 с.
- Вольдек, А.И. Электрические машины/А.И. Вольдек. -М.: Энергия, 1978. -832 с.
- Костенко, М.П. Работа многофазного асинхронного двигателя при переменном числе периодов/М.П. Костенко//Электричество. -1925. -№ 2. -С. 87.
- Holtz, J. Sensorless Control of Induction Motor Drives/J. Holtz//Proceedings of the IEEE. -Aug. 2002. -Vol. 90, no. 8. -P. 1359-1394.
- Ben Hamed M. A Digital Phase Locked Loop Speed Control of Three Phase Induction Motor Drive: Performances Analysis, International Journal of Energy and Power Engineering/M. Ben Hamed, L. Sbita//EPE Journal. -Brussel, 2011. -№ 3. -Р. 61-68.
